



5.2.1 数字伺服控制基本原理
1.数字伺服控制基本原理
在模拟量交流伺服系统中,位置控制部分由大规模集成电路LSI完成。而伺服控制的速度、电流和驱动是由速度单元来完成的。在全数字的伺服系统中,速度环和电流环都是由单片机控制。FANUC的系统把速度、电流控制部分设计在系统的内部,该伺服部分作为系统控制的一部分,通常叫做轴卡。该部分实现了速度和电流的控制,最终将被三角波调制后的删信号输出到伺服装置。如图5-9所示简要地描述了轴卡的控制框图。
位置控制是数控系统的主要控制工作之一。位置环是伺服控制的最外环,以位置指令针为控制对象。如图5-9中所示,系统的位置指令通过总线传给插补器,插补器会产生一系列指令脉冲。该指令脉冲经过指令倍率CMR乘积后输出到误差寄存器中。而位置检测装置反馈的脉冲经方向鉴别电路以后也处理成一系列脉冲,该脉冲经过检测倍率DMR乘积后也输出到误差寄存器中。该位置误差计数器为一双向计数器,用于积分计算。当指令与反馈的差增大时,该计数器的数值增大;当指令与反馈的差减小时,该计数器的数值减小。计数器的差值与环路增益的乘积即为速度环的速度指令。该指令经过D/A转换后,作为速度控制单元指令模拟量信号(VCMD)。而实际上位置环处理中包括了丝杠反向间隙和螺距误差补偿信号。
速度控制单元包括了伺服控制的电流环和速度环的双环控制系统。它将位置环发出的VCMD指令经过运算和放大后,驱动三相变频桥组产生与电动机转子相对应的交流旋转磁场,使电动机转子产生旋转扭矩。在图5-9中,速度指令VCMD和速度反馈信号TSA都输入到误差放大器中,经过误差放大器的补偿后作为控制电动机的电流(扭矩)指令。由于交流伺服电动机要根据转子的位置产生交流的旋转磁场,所以转子位置控制电路根据位置检测装置传来的信号产生R/S相的电流指令,该电流指令再和电动机的动力线的R/S相电流相减后输送到电流环(电流指令)中,该部分即为输出三相的电流指令。该指令经过三角波调制后产生了用于驱动逆变块的脉冲信号。
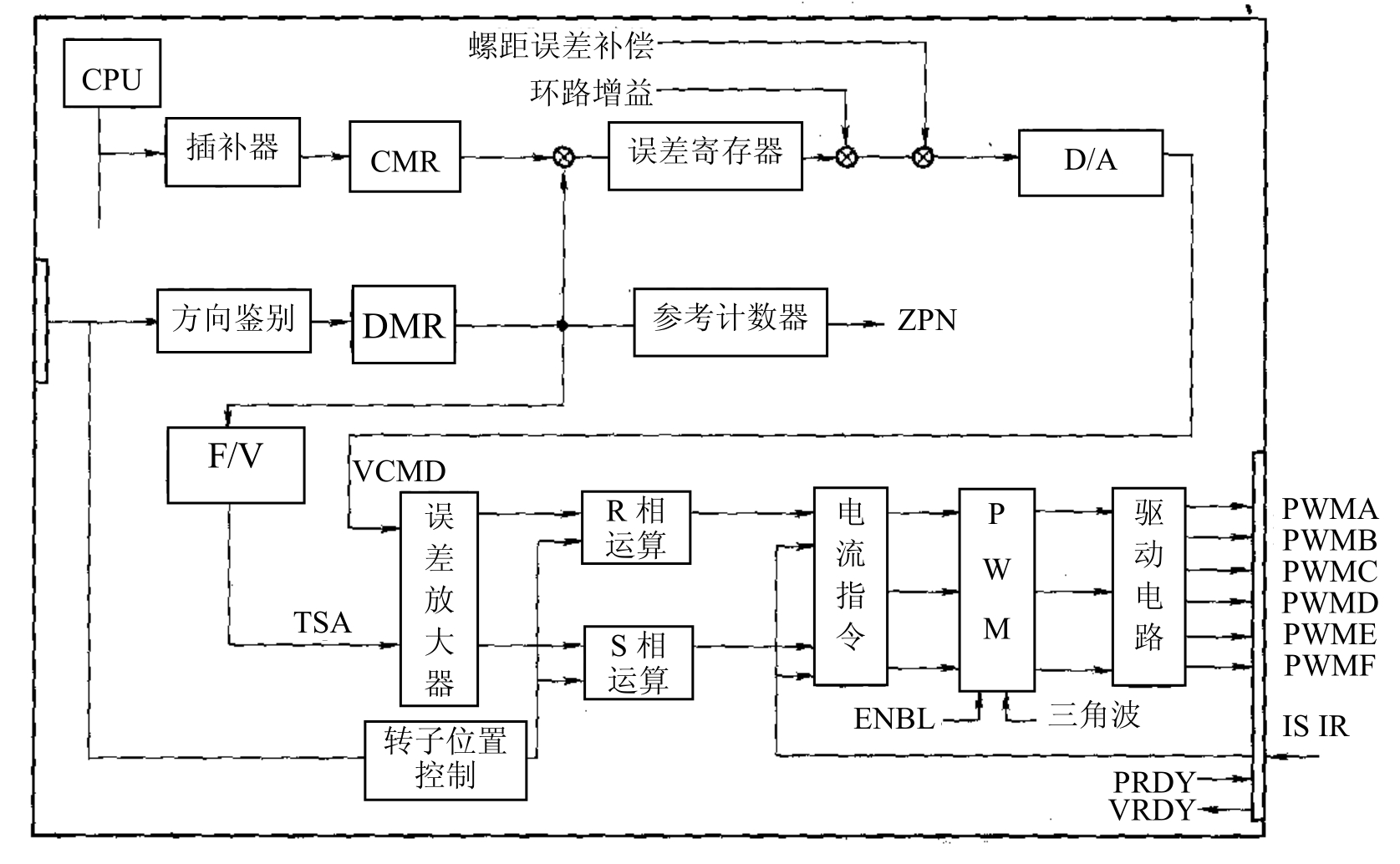
图5-9 数字伺服控制框图
除了位置、速度及电流控制电路外,当系统的电源打开后,系统在伺服的初始化过程中,会发出PRDY(*MCON)信号,如果伺服装置正常,则会发回一个VRDY(*DRDY)信号作为速度单元正常的响应,系统则进入正常工作状态。一旦系统没有接收到VRDY信号,就会产生NOT READY(伺服未就绪)报警。
2.进给伺服系统的接口形式
FANUC系统进给伺服接口形式有A型和B型两种形式。A型伺服接口是指进给伺服电动机的内装编码器信号反馈到CNC系统;B型伺服接口是指进给伺服电动机的内装编码器信号反馈到伺服放大器。FANUC-0C/0D系统可采用A型和B型伺服接口两种形式,多数采用A型伺服接口。FANUC-16/18/0iA系统和FANUC-16i/18i/0iB/0iC均为B型伺服接口。
3.进给伺服装置的分类
FANUC伺服装置按主电路的电源输入是交流还是直流,可分为伺服单元(SVU)和伺服模块(SVM)两种。伺服单元的输入电源通常为三相交流电(200V,50Hz),电动机的再生能量通过伺服单元的再生放电单元的制动电阻消耗掉。FANUC系统的伺服单元有α系列、β系列、βi系列(本书介绍βi系列)。伺服模块的输入电源为直流电源(通常为DC300V),电动机的再生能量通过系统电源模块反馈到电网。FANUC系统的伺服模块有α系列、αi系列。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











