



针对子系统动力学模型式(6.5),设eqi=qi-qdi,eτi=τci-τdi,τdi为执行器末端分配到各关节的期望力矩,qdi为各关节期望位置,qi为各关节实际位置。当qi趋向于qdi时,eqi和eτi之间存在数值关系,所以定义滑模变量为
对式 (6.7) 求导, 得
取控制律
其中ki,kvi,kpi为正常数。在各关节子系统中,根据模糊系统的万能逼近理论[166],采用模糊系统 来逼近未知项
来逼近未知项
 [167],则:
[167],则:
其中θ^ih为可调参数向量, 为模糊基函数向量。
为模糊基函数向量。
其中ηi为正常数,向量xi,矩阵P、B将在后续设计中给出。
设计非脆弱鲁棒控制项为
其中K为控制器增益, ΔK为增益摄动量。
将控制律式 (6.9a) 带入式 (6.8) 中, 且
其中εi为模糊系统的逼近误差,所以 。
。
则
设 ,则其状态空间形式为
,则其状态空间形式为
即
其中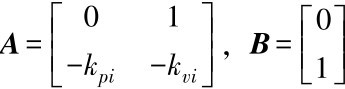 。
。
定理6.1: 对于式 (6.5) 的受限可重构模块机器人子系统, 基于给定的γi>0,正定矩阵P,如果存在以下的LMI成立:
则控制律设计如式 (6.9a), 参数自适应律如式 (6.9b), 非脆弱鲁棒控制项如式 (6.9c), 可使得:
(1) 可重构模块机器人系统渐近稳定且能跟踪期望的位置和力;
(2) 扰动信号到输出信号的传递函数满足如下 跟踪性能:
跟踪性能:
证明: 取Lyapunov函数为
因为
其中, 定义为扰动项。
定义为扰动项。
将式 (6.15) 带入式 (6.16) 中, 得
将参数自适应律式(6.9b) 带入上式,其中γi>0为指定的干扰抑制指标, 则
取
其中Q为正定对称矩阵, 则
对上式两边积分
因为Vi[x(T)]≥0,所以
满足 跟踪性能。
跟踪性能。
由于 ,则存在δdi>0使得
,则存在δdi>0使得 成立,则式(6.20) 变为
成立,则式(6.20) 变为
λmin(Q)为矩阵Q的最小特征值。
对任意的σi>0,使得 ,通过选择参数
,通过选择参数
此时 , 根据Lyapunov稳定性理论, 可重构模块机器人系统渐近稳定且能跟踪期望的位置和力。
, 根据Lyapunov稳定性理论, 可重构模块机器人系统渐近稳定且能跟踪期望的位置和力。
根据Schur补引理[168],不等式(6.19) 等价于
得出定理成立的LMI条件, 定理得证。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










