



10.2 大面积边坡变形位移的观测
边坡的观测以测量位移为主(包括水平位移和垂直位移),其次需进行必要的水文地质观测、气象观测、风化速度观测等。按边坡位移观测所采用的手段不同,主要可分为设站观测和仪表观测。
10.2.1 设站观测法
设站观测法也称普通测量法。设站观测是在变形边坡地区设置观测桩、站、网,在变形边坡以外的稳定地段设置固定站进行观测。由固定站用经纬仪、水准仪、钢尺等,按时观测边坡变形范围内网点的水平位移和垂直位移。
1)网型布置
设站观测法的观测网型布置,决定于观测区的范围、地形条件以及观测要求,一般采用以下几种网型:

图10.1 十字形站网
·十字形观测网 十字形观测网,如图10.1所示,它适用于变形边坡窄长、观测范围不大、滑体滑动主轴明显的情况。此时,可在沿滑体主轴方向布置一排观测点,垂直于主轴方向布置若干排观测点。设点时在同一排上的变形带和稳定区均需有测点控制,以便进行分析对比。固定点可设在主轴剖面上或其他通视地点。此类网点建网和观测都较方便。
·放射形观测网 放射形观测网,如图10.2所示,适用于通视条件较好、观测范围不太大的变形边坡。在变形边坡以外的稳定地带,选择观测通视条件较好的位置布设2个固定测站,从固定测站按放射状设若干条观测线,在测线终点的稳定岩体上设照准牌,定期观测2组放射测网交叉点的位移变化。此法的优点是观测时搬镜次数少,可节省人力和时间。但测点布置不甚均匀,靠近测站的测点观测成果较精密。
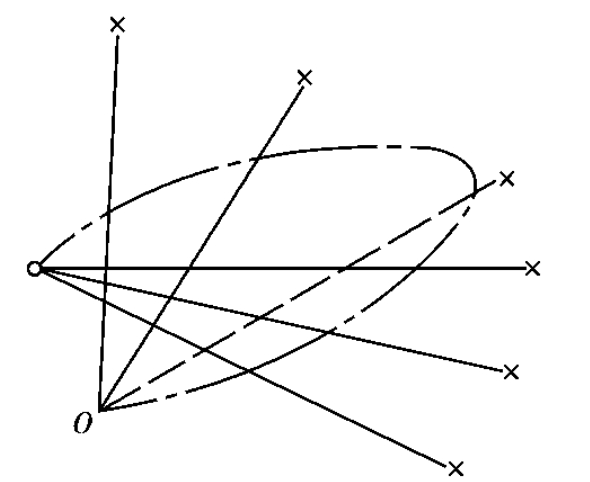
图10.2 放射形站网
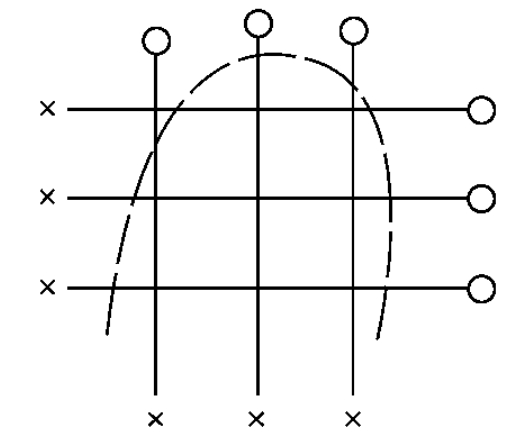
图10.3 方格形站网
·方格形观测网 方格形观测网一般适用于地形条件复杂的大型边坡的观测。在观测范围内设置不同方向观测线,使测线纵横交叉,组成方格网形,如图10.3所示。观测线数量不限,观测点一般布置在纵横剖面线的交叉点上。此法的优点是:只要求每条测线通视,受地形条件的影响较小,测点分布可任意调整,且分布均匀,观测精度高;缺点是:固定测站多,建网时工作量大,每次观测时,1个固定测站只能观测1条测线,仪器搬动频繁,人力物力消耗大,费时间。

图10.4 三角站网
△表示三角站
此外,当观测地区交通极为困难而难以布置大量测点时,可在变形带外围的稳定边坡上设置三角站网,如图10.4所示,用以观测变形边坡上少数测点的平面控制变化。另外,除在地表设站观测边坡位移外,为了了解不同高程岩体位移变化的情况,也可在边坡断面上,不同高程处开挖勘探平硐,在硐内设桩观测。根据不同高程岩体位移变化情况,以便研究边坡岩体在某一剖面上的变形规律。观测点可用混凝土将金属杆浇注于岩体中构成,或以金属杆柱、木桩等直接打入松软的岩土中,前者为控制点,后者适用于工作点。对于任何结构的测点都应符合以下要求:
①观测点上部应有清楚的中心,以保证精确测量。
②便于观测。
③保证桩柱与岩体牢固结合,使观测点能真实反映岩体的位移。观测点设置完毕后,应将其控制点与附近三角测量网建立联系确定其坐标。
至于各次观测的间隔时间,随边坡岩体移动量大小、变形特征、观测目的以及有滑动危险的建筑物等级而定。降雨后应适当增加观测次数,对于正在变形滑动的边坡,要严加监视,必要时应进行昼夜连续观测。观测方法、精度等均需满足测量要求。
滑体除设置观测线观测外,有时还要对滑体上具有特征性的地方如层面、裂隙等处设置专门的观测点进行观测。对边坡虽无明显变形,但有可能发生滑动的地段,为了判定其是否可能发生微小的移动,也应该进行观测,以便及时采取措施。
2)观测工作注意事项
①观测网形,一般以方格网形为好,如不能采用正方格网,可采用适应性好的任意方格网形,但主要依据地形、地质情况和设备的技术条件而定,也可根据不同目的采用综合网形或将其简化。
②固定测站应选择在变形区以外的稳定地点,并宜设置防护桩及负桩,以便校核。固定桩一般用混凝土桩,埋设深度应大于冻结深度以下0.5m。在不冻区,应埋于地表0.5~1m以下。
③照准桩应选在变形区外固定地点。
④无论照准桩或观测桩都应妥为保护,防止被人畜、滚石破坏。
⑤在观测的同时,应系统搜集水文和气象资料,以及水文地质长期观测和其他观测资料,特别是与变形边坡关系较大的河水位、水库水位、地下水位、降水、温度、地震等资料更应注意搜集。
⑥观测线以大体上平行及垂直滑动方向为佳。布设观测网时,要考虑周全,尽可能避免中途设网线。
⑦观测工作最好在1天内完成,并使用同一台仪器,由同一人观测。
⑧观测桩要统一编号,并使用统一的观测记录表格。
3)观测资料的分析整理
一般对变形边坡的观测都是为了分析研究边坡变形破坏的规律,其最基本的观测资料为各观测桩的水平位移和高程变化的数据。对这些数据进行系统分析整理后,据以做出客观的判断。
①编制边坡水平位移矢量图及累计水平位移矢量图。将各测桩的水平位移量按一定比例,并按位移的方位绘在各测点处,如图10.5所示。从图中可以看出水平位移随时间的变化情况。
②编制边坡高程升降矢量图及累计升降矢量图。如图10.6所示,以各测线为基准,横线以上为上升,横线以下为下降,将各点高程的变化按比例(与水平位移矢量图相同)绘在图上。从图中可以看出高程升降随时间的变化情况。

图10.5 水平位移矢量示意图

图10.6 高程升降矢量示意图
在分析计算各测桩位移时,除了求出其左右移动量、前后移动量外,还要找出高程的升降量,如图10.7所示。其中图10.7(a)图为坡面正视图,当测点A位移至B时,其直线的移动量(即AB的距离)为u,实测得AB线与水平线BC的夹角为α,从A点向水平线作垂线段,两线交于C点,于是△ABC为直角三角形,设BC长为x,AC长为v(它们的大小可通过实测获得)。从图10.7(a)图中可知,x为A点左右移动量,而v并非A点的上下移动量,实际上是A点在坡面沿高程的倾斜长度。为了求得A点的上下升降量和前后移动量由图10.7(b)图(坡面测视图)可以看出,由于其边坡倾角为β,从C点作水平线和从A点作垂线,使两线相交于D点,则△ABD为直角三角形,设AD为y,CD为z,可见z为A点的前后移动量,y为A点的上下移动量,它们的大小可通过计算求得。从图10.7(c)图中的三角关系可以写x,y,z三者各自的数学表达式为:


图10.7 边坡水平位移高程升降计算图
(a)边坡正视图;(b)边坡侧视图;(c)综合图

图10.8 滑坡位移矢量图
③编制水平位移动和高度变化综合图。将上述2种分析图重叠,如图10.8所示。从综合图上可圈定滑坡体周界,并可确定主滑线。
④绘制边坡位移(某点水平位移、垂直位移等)与时间的关系曲线图。从图上可以分析边坡位移的状况与发展趋势,以便为滑坡预报提供依据。通常边坡位移的初始阶段位移的增加比较均匀,在滑坡前发生的一小段时间内,位移常常停顿,其后位移显著增大,这往往是滑坡的预兆。从位移与时间的关系曲线上可以推测出发生滑坡的日期。
⑤编制变形和地下水位变化的关系曲线,用以观察位移和地下水位以及降水之间的关系。水是产生边坡滑动的活跃因素,因此,雨季往往滑坡比较频繁。
4)位移观测资料的分析判断
①根据位移矢量关系,判定滑坡体的个数,如图10.9所示。上部观测桩普遍向东移动,而下部桩观测普遍向西移动,可以判定为上、下滑动方向不一致的2个滑坡体。
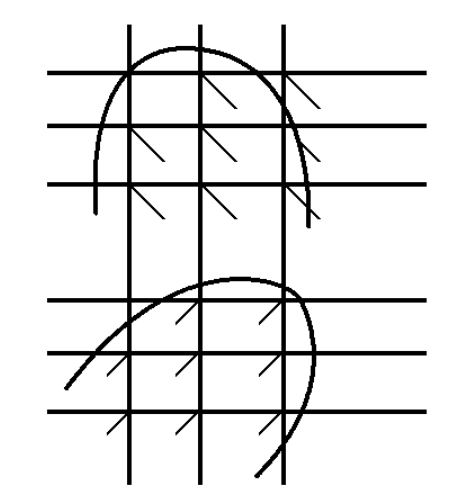
图10.9 上、下不一致的2个滑坡体
②区分老滑坡体上的局部移动。老滑坡和其上的局部移动的变化规律在时间、方向及位移量上有所不同,据此可以判断在老滑坡上出现的局部移动,如图10.10所示。

图10.10 老滑坡体上的局部移动
③确定滑坡体的周界。根据观测桩的位移和位移方向可以确定滑坡的周界,一般滑坡体群内各个滑坡边缘位置的观测桩,其位移方向向各自的滑体偏移,而2个滑坡中间的观测桩其位移是很小的,由此可以确定若干滑坡体的周界及其范围,如图10.11所示。
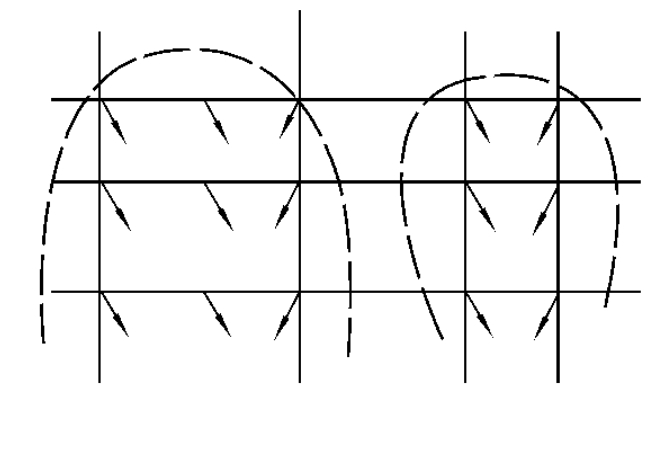
图10.11 确定滑坡体周界示意图
④判定主滑线。在滑坡位移矢量图上,找出每一横排上位移量,下沉量最大的点,将这些点纵向连接起来,就是滑坡体的主滑线,它是滑坡体的滑动方向,如图10.8所示的主轴线。
⑤判定滑床形状。当滑坡体只有1个滑动面时,各观测桩的合矢量(水平与升降矢量的合矢量)与水平线的夹角α,常与滑坡床上相应部分的滑动面倾角相似,据此可以推断滑动面的倾角α,从而也可以定出滑床的形状。即:
![]()
⑥判断两桩间岩体的受力性质。从两相邻观测桩在平面上同一方向位移累计值比较,可以判断两测桩间的受力性质是受压或是受拉。以此差值与两桩设站初期平均距离的比值来表示其受力的性质。
![]()
式中 ε——单位长度内两桩的变位差,单位mm/m;
L0——建桩初期两桩的平均距离,单位m;
∑γB-∑γA——两桩间累计位移差,单位mm。当其为正值时,说明两桩间岩体受拉;当其为负值时,说明两桩间岩体受压。
因此,用上法可划分滑体上的张拉区和压缩区。
⑦判断边坡岩体的变形特征。当在不同高程的山体内(探硐内)设有多层观测桩时,可根据在同一垂直断面上不同高程观测桩的位移合矢量的大小,判断边坡岩体是一般性滑动、表层滑动、深层滑动或是旋转等。此外,根据各桩间位移量的大小和位移方向可判定滑动体的位置,如图10.12所示。

图10.12 判断滑体位置
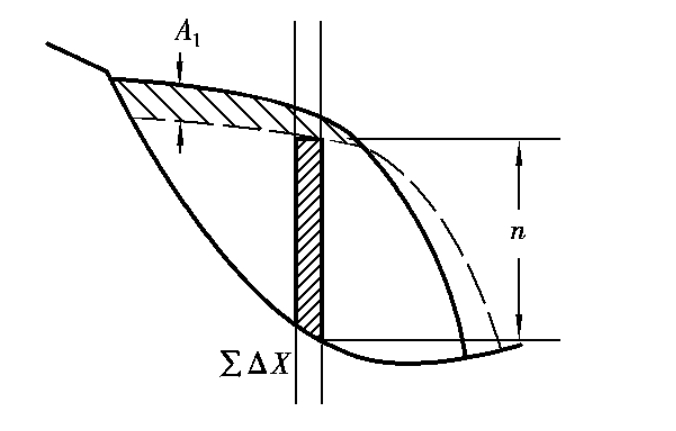
图10.13 滑坡深度计算示意图
⑧估算滑床的深度。对压缩变形量小,呈整体滑动的边坡,可利用某观测桩以上滑体沉降的面积F与该桩顺轴向水平位移∑ΔX的比值估算该处滑床深度h,如图10.13所示。
![]()
⑨预报边坡滑移破坏的时间。根据位移变化速率及变位与时间的关系曲线可以预报滑坡的时间,有关具体内容将在第11章中详细介绍。
10.2.2 摄影测量法
在监测大面积边坡移动的方法中,尚有摄影测量法。该法是用地面摄影经纬仪,在不同的时间内,对边坡进行摄影测量。由于摄影照片记录了大量的地面信息,所以对边坡变形各阶段的照片进行测量分析,比较历次摄影测量的相应点的位置,确定不同时间内边坡移动的特征。每次摄影测量,需从2个固定点对边坡进行全面拍摄,再利用所得照片用与之专门配套的测图仪上确定边坡上各点的空间位置,其原理是测量学的交会法。
摄影测量法的优点是:它测量的不是边坡上个别观测点的移动,而是整个观测视野内边坡上所有点的移动。对人员不能到达的地方也能测量。
摄影测量精度主要取决于y距(又称纵距)及摄影经纬仪的焦距。一般来说,纵距越小精度越高,焦距越长,精度越高。因此若用摄影测量法作为边坡变形监测时,应根据边坡变形量的大小及y距长短选用适当的摄影经纬仪。较大的滑坡,y距一般都较大,因此最好在相邻测次间的变形量大于0.1m时才使用此法。根据国外有关资料介绍,其精度为测距的1/5000。
常用的摄影经纬仪有UMK10/1318,UMK20/1318和UMK30/1318等,整套仪器昂贵,资料整理复杂。
10.2.3 光电测距仪监测
近年来,已广泛使用光电测距仪监测边坡的移动。它是根据光束从仪器传播到设有反光镜的观测点所需的时间来计算测距仪和测点之间的距离,进而判断边坡的移动情况。

图10.14 光电测距仪观测
具体的测法,如图10.14所示。对需要观测的地段,在台阶坡面上,可布置测量网点,每个测量网点分列挂有1个与边坡岩体表面固定的玻璃反射镜,用光电测距仪发出的电子光束分别对准反射镜定期对测点进行测量。
光电测距仪的工作原理是:由定向集射发射器发出的已调电子光束射到边坡观测点的反射镜上,光束经反射镜又反回到仪器。如发射器与反光镜间的距离为S,电子速度恒定为v,若测得电子束往返的时间为t,于是有2S=vt或 t。定期测定S值的变化情况,如在t1与t2的时间内测得其距离分别为S1与S2,那么在t1-t2的时间内边坡岩体的移动量ΔS=S1-S2。然后再通过附近固定的三角测量点,计算并确定各观测点的空间坐标x,y,z及其改变量Δx,Δy,Δz,即可判定边坡各测点的位移量。按上述方法测得的结果,把它绘制成累计位移和时间关系曲线图,从图中可以判定边坡岩体的变形状态。
t。定期测定S值的变化情况,如在t1与t2的时间内测得其距离分别为S1与S2,那么在t1-t2的时间内边坡岩体的移动量ΔS=S1-S2。然后再通过附近固定的三角测量点,计算并确定各观测点的空间坐标x,y,z及其改变量Δx,Δy,Δz,即可判定边坡各测点的位移量。按上述方法测得的结果,把它绘制成累计位移和时间关系曲线图,从图中可以判定边坡岩体的变形状态。
由于光电测距仪的测距大,所以可将其设于某固定点监测远处边坡上各观测点的移动,因而量测方便。另外,它可对人员难以到达的危险边坡或陡峭的坡面进行测量。
但这种方法受气候条件影响较大,在暴雨、大雪和浓雾期间不能监测。
10.2.4 自动化监测网(即3S工程)
为了保证三峡大坝建成后的安全,以及三峡库区沿岸边坡的稳定,三峡库区拟将采用自动化监测网(即3S工程)进行监测。
近年来由于地理信息系统(Geography Information System,GIS)和全球卫星定位系统(Global Positioning System,GPS)闻世,自动化监测技术又有了很大的发展。在GIS支持下,融GPS、遥感(Remote Sensing,RS)以及常规监测手段为一体,可建立完整的变形监测系统称为3S工程。
三峡库区从宜昌到重庆沿江长达532km,库区监测将实施3S工程。其GPS基本网将由武汉、宜昌、万州、重庆等4个基准点以及长寿、涪陵、武隆、丰都、忠县、利川、云阳、开县、巫溪、奉节、巴东、兴山、秭归等13个基本点组成。在4个基准点将建立永久性的GPS卫星观测站并进行长期的、连续观测,其余13个基本点则只进行定期复测,整个基本网由34条基线向量组成,最短的基线向量(秭归—兴山段)长度约26km,最长基线向量(利川—涪陵段)长度为130km。平均长度67 km,其中有6条基线向量超过100km。
采用GPS定位技术进行崩滑体变形监测具有下列优点:
①观测不受气候条件限制,可进行全天候监测。
②可同时进行平面位移及垂直位移监测。
③可进行长期连续监测,不会漏过危险的变形信息。
④从数据采集、数据处理到数据分析管理全过程易于实现自动化。
然而,用GPS定位技术进行变形监测也存在一些问题,主要有:
①三峡库区监测点的数量很多,如果全部进行长期连续自动化监测,需要大量的GPS接收机,据了解三峡仅Ⅰ,Ⅱ级站共有42处,按每处平均布设10个变形监测点计,共需420台GPS接收机,这种方案目前是不现实的。
②GPS接收机、太阳能供电装置及通讯设备在野外无人值守的情况下,安全难以得到保证。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










