



3.1.2 LCR-G型相对重力仪的操作
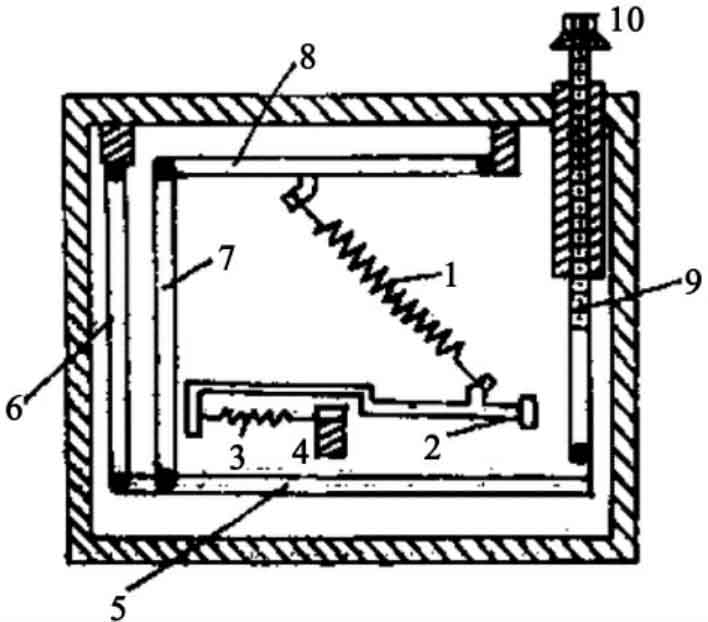
图3-3 LCR重力仪的力学原理图
拉科斯特-隆贝格(LCR)-G型相对重力仪为助动型金属弹簧相对重力仪。拉科斯特-隆贝格重力仪有两种型号,一种是G型,称为大地型,它的测程达7Gal可用来测定地球上任意两点的重力差;另一种是D型,称勘探型,它的测程为200mGal,只能用来测定小于200mGal的两点重力差。
1.重力仪LRG的基本原理
该仪器的基本构造如图3-4所示,测量系统的工作原理是:测量时旋转读数盘1,经过减速箱11,由齿轮带动精密测量螺杆3,驱动下杠杆6,再用连杆7推动以A为支点的上杠杆9。因为主弹簧上端点挂在杠杆B点,下端点挂在摆杆的C点,所以当上杠杆被推动时即带动主弹簧,携带摆杆使其处于水平位置(归零)。读取计数器和读数盘上的读数,完成一个观测过程。
从以上的基本原理可知,观测重力差的方法仍然是零点读数法,在每一点上由于重力变化而使摆杆5不在零位置(水平方向)上。此时可旋转测微螺旋14带动螺杆3和连杆6~9的运动,再带动主弹簧,而使摆杆恢复到零位置,最后在计数器上读数。在这种弹性系统中,通过6~9这一组连杆可以使主弹簧弹性矩的微小变化,转化为测微螺杆较大的变化。
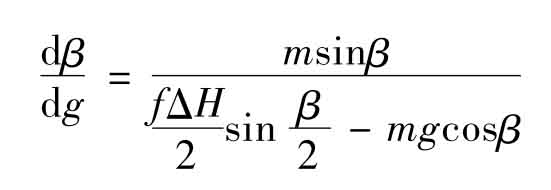
经过推导,可以导得摆杆的平衡方程为:
![]()
或写为灵敏度公式
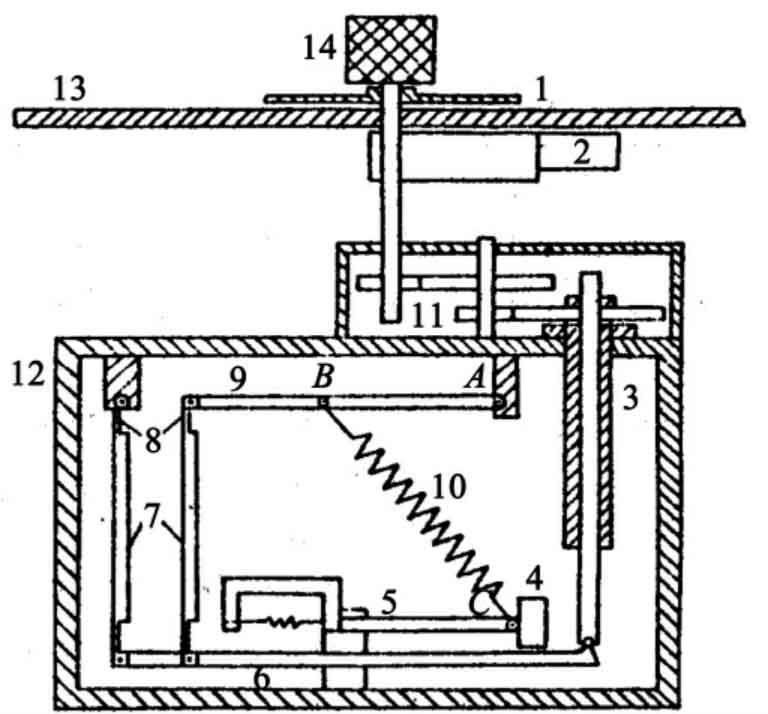
1—读数盘;2—计数器;3—精密测量螺杆;4—摆锤;5—摆杆;6—下杠杆;7—连杆;8—片簧; 9—上杠杆;10—主弹簧;11—减速箱;12—加热盒;13—面板;14—手轮
图3-4 测量系统示意图
式中: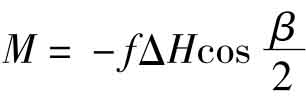 为弹力矩。
为弹力矩。
拉科斯特重力仪从总体上可分为工作和壳体两大部分。工作部分主要包括:弹性系统、测量系统、光学系统、锁摆装置、水准器、磁屏及密封盒等;壳体部分主要包括仪器外壳、面板、隔热材料、置平螺旋、温度计、加热丝和电气元件等。
该仪器最大优点是量程大、体积小、重量轻、分辨率高、漂移小,因此在国际上得到了广泛的应用。但它存在弹性漂移,使得精度的进一步提高受到限制。
2.仪器的读数系统
LCR重力仪除了测量系统、光学系统、灵敏系统外还有两套读数系统。一套为光学读数装置,它是通过一组光学系统将摆上的一根蛛丝影像投射到目镜视场内成为一条游动的亮线,同时在目镜现场内还有刻度线,只要将亮线与刻度线中间的零线重合,摆杆就在零位置上。这与ZSM型重力仪读数系统的原理是相似的。此重力仪的另一套读数系统是电子读数系统,它是利用一个电容传感器将摆杆的位置变化转换为电压幅度的变化,信号通过放大系统和相位比较器输出到自动记录仪上。
在读数过程中,仪器电压要足以保证仪器在恒温状态下运行;开始读数前要先整平;每读一个数,齿轮要回转半圈到一圈以减小齿轮误差;连续读的三个数之差要在0.005以内;读完数后一定要先锁摆再装箱。
拉科斯特重力仪采用“零长弹簧”。所谓“零长弹簧”就是一种长周期且具高灵敏度的弹簧,当所受外力为零时,它的有效长度也为零。
3.重力仪的操作
操作重力仪的步骤是:
(1)把仪器轻轻放置于仪器专用底盘上。
(2)打开电源开关,观察仪器内部的纵、横水准器水泡是否居中。
(3)若水泡不居中,用手指旋仪器外壳下部三个脚螺旋,调整水泡,直到使纵、横水泡都居中为止。
(4)观察目镜筒中刻度片上的“亮线”位置是否与刻度片中间最长线(零线)重合。
(5)若不重合时,用右手旋转面板上的计数器旋扭,使“亮线”移动后与零线重合,称零点读数。一般亮线在零线左侧,须顺时针旋转计数器旋扭,亮线在零线右侧,须逆时针旋转计数器旋扭。
(6)为了消除计数器的齿轮间的螺距差,在零点读数时,应使亮线沿同一方向去拟合零线。
上述6步完成后就可读出仪器在某一点的观测数值来,即称为水平零点读数。这是正确使用仪器的要求。
一般来讲,仪器短时间在同一点上几次读数应满足精度要求,如果前后两次读数相差很大则需认真检查仪器是否处于正常的工作状态,找出问题后,重新测量。
4.重力仪的调试
重力仪使用前主要应对仪器的灵敏度进行调试。首先应检查仪器的光线灵敏度,该过程相对比较复杂,应在老师的指导下完成。光线灵敏度是指亮线从零刻度线位移到+1或-1刻度线时仪器读数之差。一般ZSM型石英弹簧重力仪的读数差在16~20格为宜,小于此数称灵敏度过高,这时仪器很难稳定,读数困难;大于此数称灵敏度过低,仪器灵敏系统迟钝,不能反映微小重力变化,从而影响测量精度。
(1)重力仪零点位移测试:一台性能稳定的重力仪要求是零点位移很小并有一定规律。这种规律可以通过静态观测和动态观测结果了解。由于仪器内部的灵敏系统是由弹簧制成的,长时间的工作难免出现弹性疲劳,所以重力仪观测结果往往随时间延续有变化,这种变化我们称之为零点位移(零点掉格)。
(2)重力仪突然掉格:当弹性系统受到外力产生突然震动时,读数值会有很大变化,称突然掉格。在工作中这种读数突变是绝对不允许的,突然掉格以后的数值是不能用来计算重力异常的。因此工作期间仪器要轻拿轻放,避免强烈震动,仪器倾斜度要小于45°,尤其是仪器放置于底盘上时,不能互相碰撞。另外仪器在运输过程中要注意平稳、防震、防潮、防晒。重力仪器突然掉格,不仅影响测量工作,而且掉格恢复很慢,经常突然掉格,仪器性能损坏很大。
(3)仪器“粘摆”:在工作中有时会发现亮线停留在刻度片某一侧不动,这时即使旋转计数也不能使亮线移动,这种现象称为“粘摆”。粘摆原因主要是仪器灵敏系统的空间真空度降低了,空气中的水汽使摆杆前的指示丝粘附在限制器上。若情况不太严重时,可用手指轻轻弹击仪器面板即可消除粘摆现象。
(4)检查灯泡及电池,以顺利完成任务。
上述内容虽是施工前的准备工作,但很重要。
5.重力仪的观测精度
由于此种重力仪的观测精度很高,所以还必须考虑仪器格值标定的两种误差,一种是格值的线性及非线性改正;另一种是格值的周期性。
第一种误差是由于弹性系统中使摆杆置于零位置的杠杆系统的非线性变化而使格值产生系统误差,因此必须对格值进行改正。
第二种误差(周期性误差)是由于测置螺杆上螺旋的不规则和齿轮系统的偏心而引起的,是以螺旋一周或半周为周期的周期性误差。齿轮系统是用来将刻度盘的旋转化为测量螺旋角位移的一种驱动装置,它是由N个齿轮组成的。为了顾及这一误差影响,必须对每台重力仪进行特殊的标定,求出各个周期误差的振幅及相位。
这种重力仪具有恒温装置和低压抵偿装置,用来制造弹性系统的金属材科预先经过了消磁,所以可以消除外界温度、气压以及磁场的影响。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










