



利用遥感影像进行变化检测
航天和航空遥感技术在最近20年中取得了飞速的发展。遥感数据获取技术趋向三多(多传感器、多平台、多角度)和三高(高空间分辨率、高光谱分辨率、高时相分辨率),从而可以每天发回以TB为单位的影像数据,利用这些影像数据,我们有可能实时、自动地回答何时(When)、何地(Where)、何目标(What object)、发生了什么样的变化(What change)的“4W”问题。如果真的能实现这个目标,将意味着遥感走上了一个新的台阶。本文就如何利用遥感影像对地物目标进行变化检测问题,提出自己的思路和方法。
1 变化检测问题的紧迫性和困难性
地理空间数据信息的现势性是GIS的灵魂,它远远高于几何精确性。目前,全球空间测图的速度,截至1993年统计,1∶5万覆盖了65.6%,而更新的速度仅为2.1%。尽管我国改革开放后十分重视地理空间数据采集,1∶5万和1∶25万地形图的现势性也仅达到1997年,仍赶不上地物目标的实地变化速度。
从我国城市发展速度看,如广州,每年地表覆盖的变化达到40%~50%,要保持地理空间信息的现势性确实是非常困难的。实时自动地进行变化检测对于经济建设和国防建设也是一个十分紧迫的问题。
1)空间数据库更新是通过变化检测还是全面重测。变化检测的难度主要取决于时间差与地物变化速率。时间间隔长或地表覆盖变化快,必定会增加变化检测的难度。在这种情况下,也许重新测量、全面重新采集地理空间数据会更快更好,这样就在实际作业中产生了是通过变化检测对空间数据更新还是重新采集建库的问题。英国标准测量局(OS)根据英国土地利用变化速率不快的特点,提出了连续更新(continuity updating)的策略。
2)变化检测是仅仅利用新旧影像还是利用各种多源数据。基于新旧影像的变化检测,可以使用较简单的方法逐像元地进行,但它没有利用原有的地理空间信息中关于特征、地物和属性的先验知识。利用更多的数据源(如旧数字线划图、旧正射影像图以及待更新的空间数据库和属性库)可以为变化检测提供更多的辅助信息和知识,但增加了算法和软件的难度。
3)变化检测是针对二维还是三维进行。二维变化检测可以利用单张影像,不必利用构成立体重叠的多张影像,这样配准简单,变化检测过程也简单,但在起伏地区必须利用原有的数字高程模型(DEM)。如果高程信息确实发生了变化,它将会对二维变化检测的结果产生不可知的影响。三维变化检测必须利用立体重叠影像进行严格的三维立体重建,通过立体观察进行变化检测,这给算法带来了更大的难度。
4)变化检测是在图像配准后进行还是两者同步进行。传统的变化检测方法是先进行图像配准后进行变化检测,通常图像配准可依据少量的控制点和简单的变换公式得以进行,这种方法简单易行,但是没有利用所有未变化目标作为配准的依据,理论上不够严密,而且图像配准的误差会直接导致变化检测出错。笔者建议将变化检测与图像配准同步进行,这能充分利用所有未变化的地物目标作为图像配准的依据,而且可以更加精确,更加自动化。其主要的缺点是增加了算法的难度,需要逐像元、逐个目标地自动判断其是否发生了变化,同时算法需要迭代。
5)变化检测是采用全自动化还是半自动的人机交互方法。全自动变化检测和更新是人们追求的最好方法,它能实时化、在轨化(即实现智能传感器),但也是最困难的方法。它需要实现影像配准、影像相关、特征提取和目标解译的全自动化,因而必须挖掘和利用原有地理空间数据库多种多样的辅助信息和知识。人机交互的半自动变化检测方法从理论上可以充分发挥人和机器各自的优势,但无法做到实时化和在轨化。
综上所述,目前的变化检测技术,从理论上看,尚缺少理论基础和合适的评价标准;从方法上看,主要停留在像元级的数据导引的方法,缺少知识导引的特征级变化检测方法,尚未充分利用新旧影像间的许多关联信息,更缺少自动的变化检测方法,也没有采用空间数据挖掘方法从旧的空间数据库中提取变化检测可用的知识,变化检测中较少利用多光谱和高光谱信息,而几何信息的利用也仅仅通过对少量控制点的配准,未将所有未变化目标的几何信息加以利用,也没有成熟的方法来处理不同时相数据中由于大气条件、传感器噪声和大气辐射的差异性带来的干扰,这些都是变化检测中的关键性问题,需要加紧研究和解决。
2 变化检测方法的分类与比较[2]
笔者认为,根据图像配准和变化检测的数据源两个因素可以将变化检测方法分为两大类七种方法。第一类是先进行图像配准的变化检测方法;第二类是变化检测与图像配准同步进行的方法。按此准则,图1列出了各种变化检测方法的分类结果,从中可以演化出以下各种变化检测方法。其中,前四种为先几何配准后变化检测,后三种是配准与检测同步进行。
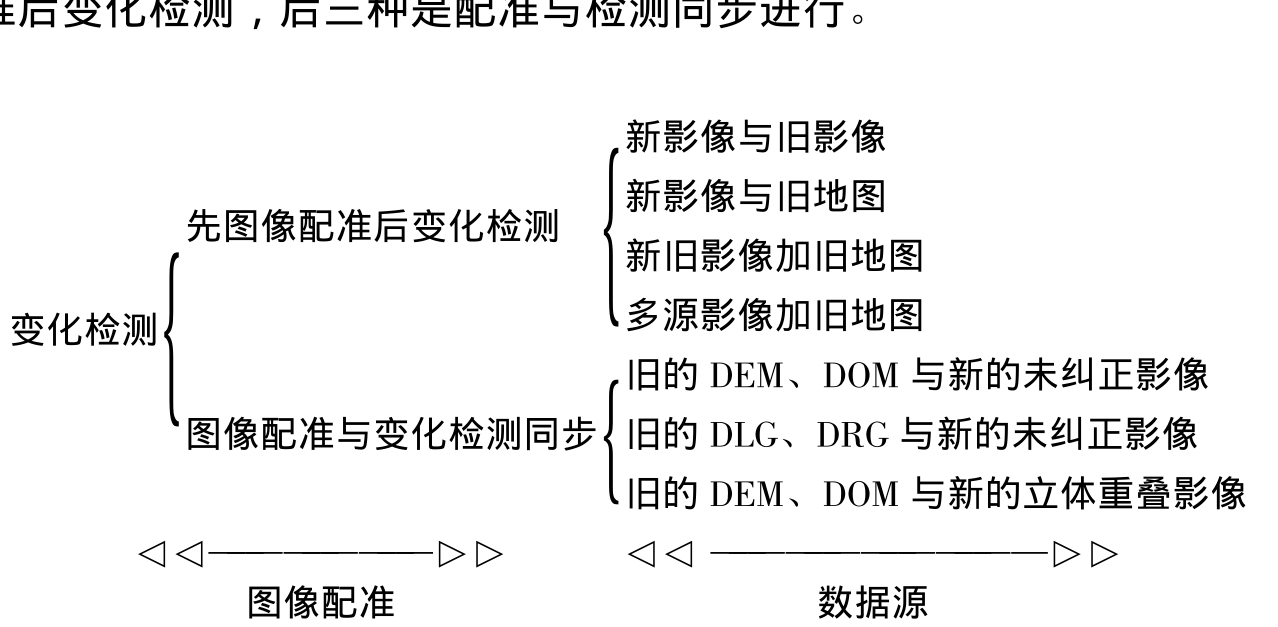
图1 利用遥感图像进行变化检测的方法分类
2.1 基于新、旧影像的变化检测方法
如图2所示,同一地区不同时期的遥感影像经几何校正(影像配准)和辐射校正后可以通过各种算术运算来比较其差异,但用于判断是否发生变化的阈值难以确定,给分类前的变化检测方法带来困难。于是人们采用分类后的方法来检测变化,但这种方法的主要缺点是存在着分类误差累积现象,从而降低变化检测结果的精度和可靠性。针对于此,肖平提出了利用人工神经元网络(ANN)和基于小波变化提取纹理特征的土地利用覆盖变化检测方法[3]。
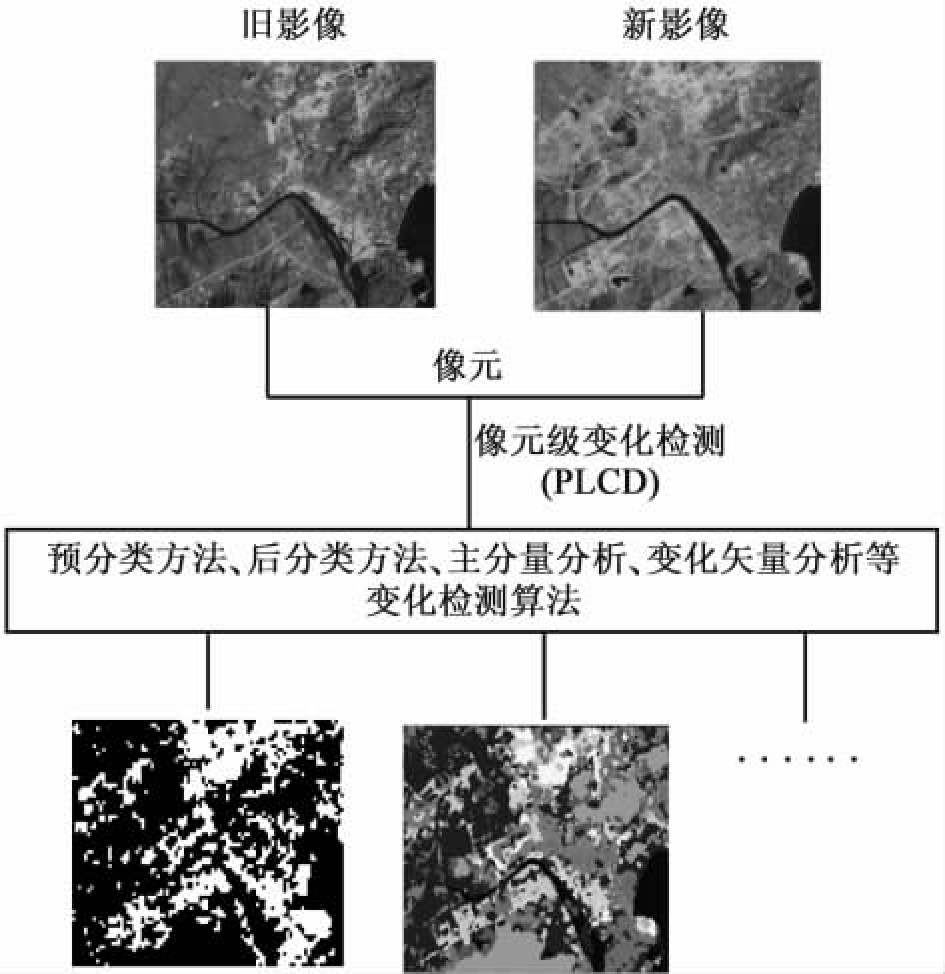
图2 基于新、旧影像的变化检测方法
2.2 基于新影像和旧数字线划图的变化检测方法
如图3所示,首先对遥感影像进行辐射校正、图像配准和几何校正,然后从已有的数字线划图上引入关于主要不变目标的信息(如已建成高速公路、高层建筑物等),在这些先验知识的引导下,对新影像进行特征提取,在二值化影像上对新旧图形进行比较和变化检测。眭海刚提出了利用数字线划图缓冲区的变化检测算法[4]。这种方法目前在国内外得到较多的应用[5]。

图3 基于新影像和旧数字线划图的变化检测方法
2.3 基于新、旧影像和旧数字地图的变化检测方法
这种方法是上述两种方法的集成,可用多级影像金字塔进行影像匹配,通过比较可以快速找出发生变化的局部范围,然后采用数字地图作为先验知识导引的特征提取方法,进行变化检测。如果能够巧妙地运用基于灰度和基于特征的算法,这种方法将会得到较好的结果。如利用高分辨率遥感卫星影像和旧GIS数据进行城市变化检测和城市扩张分析时(图4),在高分辨率影像上的某些地类,如城镇用地,由于其内部光谱分布不均匀,且在灰度上与其他一些
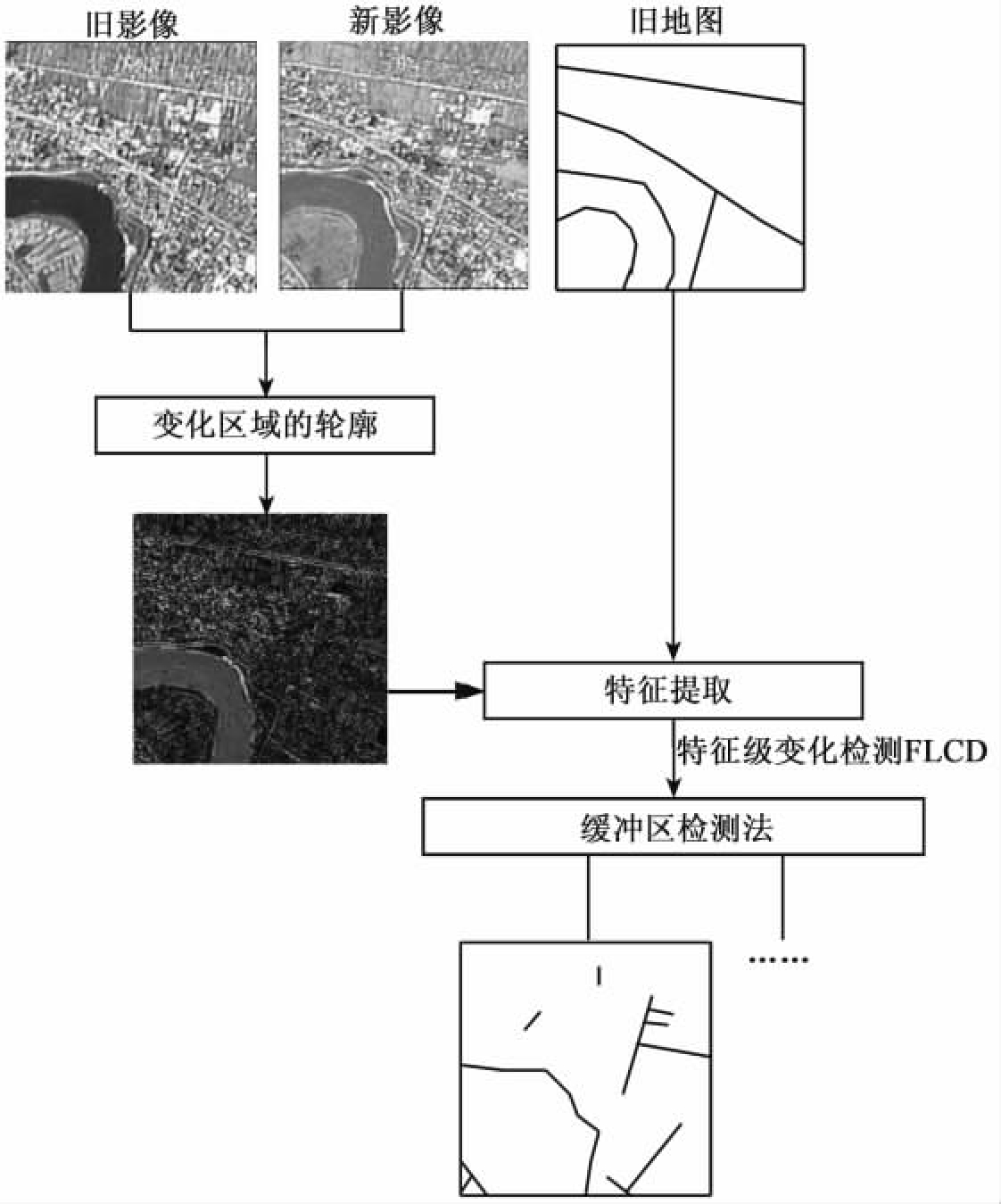
图4 基于新、旧影像和旧数字地图的变化检测方法
地类差别不大,所以采用基于影像灰度信息的分类方法其效果会很差。为此,笔者采用了同时基于影像灰度和小波纹理特征的模糊C-均值监督分类,并从中提取多边形矢量,将其与已有的GIS矢量数据通过布尔运算来完成各种变化检测,并可借用GIS的强大分析和统计功能进行变化分析[3]。
2.4 基于新的多源影像和旧影像/旧地图进行变化检测的方法
如果具有同一时相的多源影像数据,则可以通过影像融合方法获得质量更好、信息更丰富的融合影像(图5)。利用该影像,按照前述的方法,便可进行变化检测。而且影像融合本身可以在像元级、特征级和决策级进行,所以会给变化检测带来更好的效果。

图5 基于新的多源影像和旧影像/旧地图进行变化检测的方法
2.5 基于已有的DEM、DOM和新的未纠正影像进行变化检测
随着各类空间数据库的建立,在计算机网络中存在各种不同比例尺的数字高程模型(DEM)、数字正射影像(DOM)、数字线划图(DLG)和数字栅格地图(DRG),在地物目标变化检测和空间数据库更新时,完全可以利用这些已有的数据,以提高变化检测的精度、效率和自动化程度(图6)。
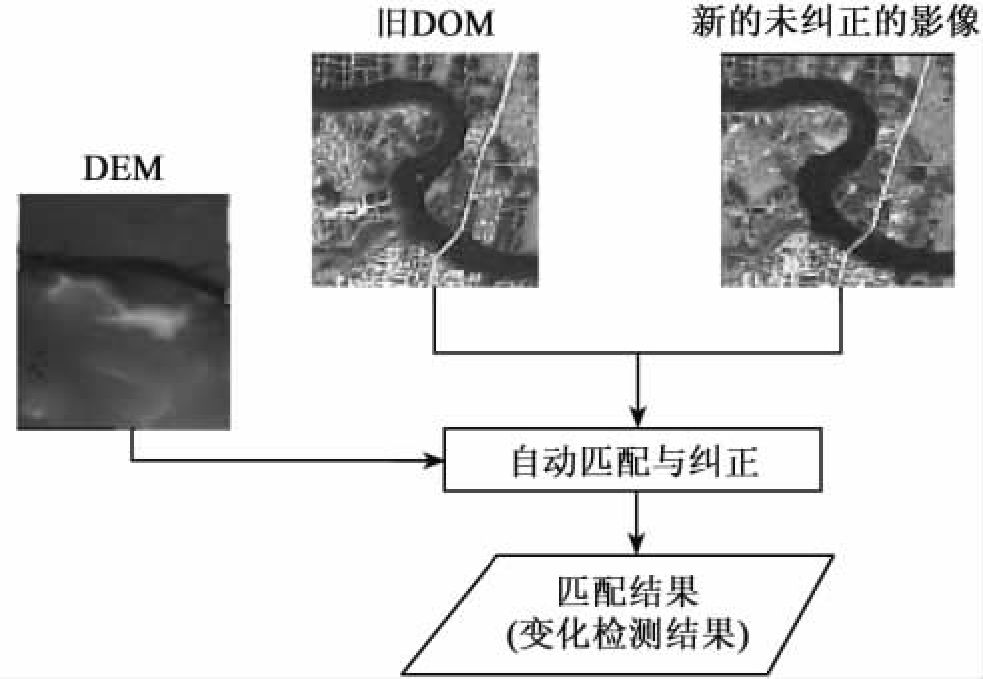
图6 基于旧DEM、DOM和新影像进行变化检测的方法
可以直接利用旧的数字正射影像和DEM(平坦地区可不用)作为控制,通过逐像元的影像匹配可以同时完成影像纠正与变化检测。此时要解求的参数是未纠正影像的外方位元素和辐射改正参数。因此,可以逐像元列出灰度方程和几何方程,下面以中心投影影像为例加以说明。
新影像上任一点的灰度g(x,y)应当是正射影像上同名点灰度G(X,Y)的函数,用FG(X,Y)表示,也可展开为辐射改正参数(h0,h1,h2,…)的函数,未纠正像点与正射影像对应物点的几何方程由中心透视成像方程所决定:


式中,(X,Y)取自正射影像,并乘以比例尺分母;Z取自DEM内插。
通过影像粗配准,确定式(1)、式(2)中各待求参数(Xs,Ys,Zs,φ,w,κ)和(h0,h1,h2,…)的初值后,可将式(1)、式(2)线性化,便可整体求解。考虑到地物目标发生变化或未发生变化两种情况,必须给灰度方程以权值Pg。
通过选权迭代法[6],在求解迭代过程中,使未变化点的权愈来愈大(即作为控制点),而已变化点的权愈来愈小(即不参加平差并被检测为变化点),最终通过对每个像元的权值和相关系数的分类和分析,自动实现影像纠正和变化检测。该方法的优点是变化检测与几何校正同步进行,由于未变化的点均作为控制点,所以系统有大量的多余观测,从而使平差系统十分稳健,不会产生上述由于影像配准的不精确而导致变化检测的错误。
2.6 基于旧的DLG、DRG和新的未纠正影像的变化检测方法
该方法的原理基本与§2.5介绍的一样,但影像匹配是在二值图像上基于特征的,此时,DLG中点、线、面地物目标的拓扑关联特性也可以被使用(图7)。
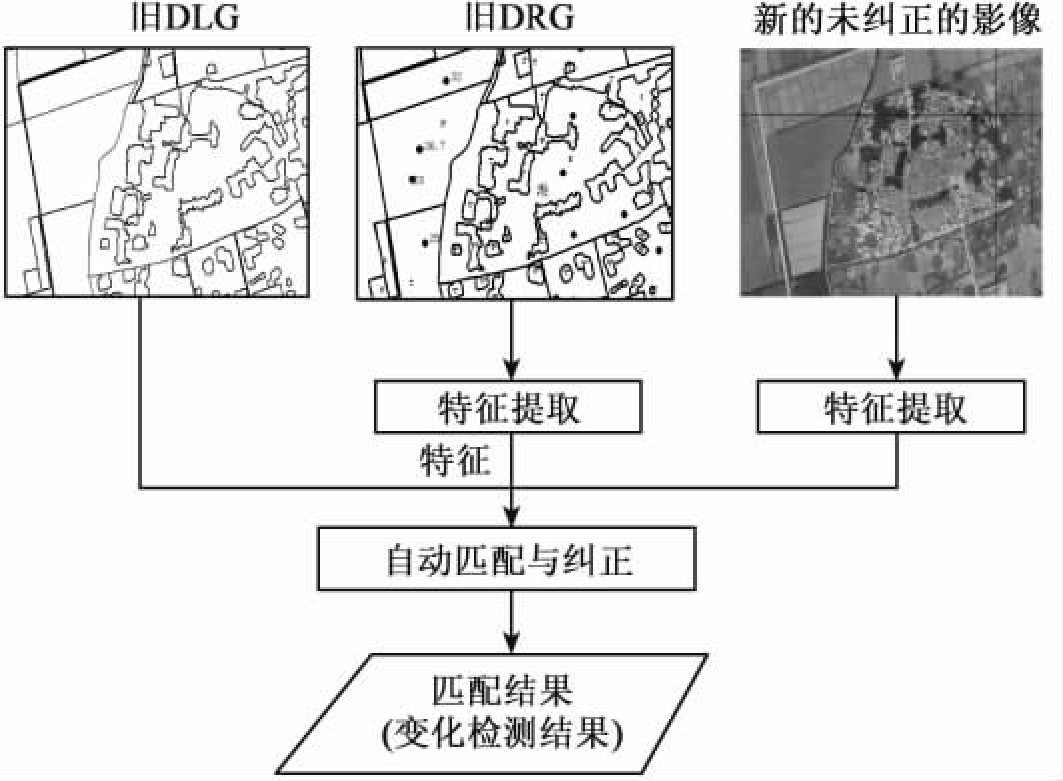
图7 基于旧的DLG、DRG和新的未纠正的影像的变化检测方法
2.7 基于已有的4D产品和新的立体重叠影像的三维变化检测方法
该方法不仅利用了前面两种方法的全部信息,而且增加了立体重叠影像,因而可进行三维变化检测,这是所有变化检测方法中最难的,也是最理想的方法(图8)。因为以上6种方法均是假设地面目标的高程信息未变化,但是,实际上这种假设并不总是成立的。如果基于灰度,仅利用已有的DOM、DEM和新的多片重叠影像来进行同步三维变化检测,只要将上面的中心投影方程式(2)中由DEM内插的地面坐标ZDEM视为有可能变化的附加未知数Z,并增加一新的观测方程式:
V2+O=Z-ZDEM,PZ(3)
对多片联立解求式(1)、式(2)、式(3),并用选权迭代法估求权PZ。若该点方程未变化,则值愈来愈大,以至于Z=ZDEM。若该点高程发生变化,则值随着迭代过程而趋近于零,而且可自动测出高程变化值。求解中,所需要的未知参数初值可由人工确定的非变化点、从DOM和DEM中读取的(X,Y,Z)及由逐点影像匹配求得的对应像点坐标为平差的控制点,使用普通基于影像匹配的全数字空中三角测量区域网平差方法求得。在这个过程中,也可以自动地比较新旧DEM而发现有可能发生高程变化的区域。

图8 基于已有的4D产品和新的立体重叠影像的三维变化检测方法
上述的后三种整体解法正在进行进一步的试验研究。对于三维微小变化的检测,即三维形变测量,采用差分干涉雷达也是一种十分有效的方法[7],目前已能达到mm级精度。
3 展望
人们对变化检测的要求是自动化、实时化和在轨化。要想实现这个目标,需要解决图像自动配准、影像自动匹配、特征自动提取、目标自动解译、影像自动融合和数据自动清理和分类等关键性难题,还要解决从GIS空间数据库中自动进行数据挖掘和知识自动发现,构建智能化的变化检测系统。
今后应当把自动变化检测的研究作为测绘遥感与GIS界的研究重点之一,组织攻关。
致谢:在本文的撰写加工中得到了眭海刚博士的帮助,谨致谢意。
参考文献
[1]李德仁.论21世纪遥感与GIS的发展.武汉大学学报(信息科学版),2003,28(2):127-131.
[2]Li D R.Automatic Change Detection of Geo_spatial Data from Imagery.Comm.II Symposium,Xi’an,2002.
[3]肖平.土地利用覆盖变化探测技术研究[D].武汉:武汉大学,2001.
[4]眭海刚.基于特征的道路网自动变化检测方法研究[D].武汉:武汉大学,2002.
[5]Manos B.Object Extraction and Revision by Image Analysis Using Existing Geospatial Data: State_of_the_Art and Steps Towards Operational Systems[C].Comm.II Symposium,Xi’an,2002.
[6]李德仁,袁修孝.误差处理与可靠性理论[M].武汉:武汉大学出版社,2002.
[7]李德仁,杨杰.从卫星雷达提取地面高程信息的原理与应用[J].大地测量与地球动力学,2002,22(2):1-6.
(武汉大学学报·信息科学版,2003,28(特刊))
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











