



【摘要】:图16.8 一个简单的信息收集智能体的设计。通过重复选择具有最高信息价值的观察,智能体进行工作,直到下一个观察的费用高于其期望利益我们描述的智能体算法实现了一种信息收集形式,被称为近视的。)然而,一个完美理性的信息收集智能体应该考虑在外部行动中终止的信息请求的所有可能序列,以及那些请求的所有可能结果。
16.6.4 实现信息收集智能体
一个有感觉能力的智能体应该按照合理的次序向用户提出问题,应该避免提出无关的问题,应该考虑到与其费用有关的每条信息,应该在合适的时候停止提问。所有这些能力都能够通过使用信息价值作为指导而获得。
图16.8显示了一个能够在行动之前智能地收集信息的智能体的总体设计。我们暂时假设对于每个可观察到的证据变量Ej,有一个相关的费用Cost(Ej),它反映了通过测试、咨询、提问或者无论什么方法而获得证据的费用。比较其费用,智能体请求得到那条看来最有价值的信息。我们假设行动Request(Ej)的结果是提供Ej值的下一个感知信息。如果没有任何观察是值得其费用的,那么该智能体选择一个“真实的”行动。
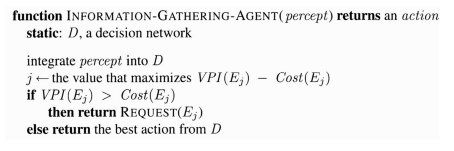
图16.8 一个简单的信息收集智能体的设计。通过重复选择具有最高信息价值的观察,智能体进行工作,直到下一个观察的费用高于其期望利益
我们描述的智能体算法实现了一种信息收集形式,被称为近视的。这是由于它短视地使用VPI公式,如同只能获得单个证据变量那样来计算信息价值。如果没有能带来很大帮助的单个证据存在,一个近视智能体可能会匆忙地采取行动,而其实如果它先请求得到两个或更多变量的信息,然后再采取行动会更好。近视控制基于和贪婪搜索相同的启发式思路,并且在实践上通常能工作得很好。(例如,已经显示出它在选择诊断测试时做得比专家医师好。)然而,一个完美理性的信息收集智能体应该考虑在外部行动中终止的信息请求的所有可能序列,以及那些请求的所有可能结果。由于第二个请求的价值取决于第一个请求的结果,智能体需要探索条件规划空间,如第十二章中所描述的。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










