



8.1.2 自适应卡尔曼滤波
随着观测数据的增加,状态估计应越来越精确,但实际应用中,滤波所得状态估计值和实际状态之间的误差,远远超过了理论估计值,这种现象称为滤波的发散,从而也使滤波失去了最佳作用,因此必须予以克服。
自适应滤波通过不断利用新信息,修正滤波的原有设计,降低滤波误差,从而达到抑制发散的目的。假设存在一个偏差b,则滤波模型式(8-1)变为:
![]()
式中,Bk、Ck为b对动态模型和观测模型的影响矩阵,噪声的统计特性不变。
上述模型的处理方法有两种:一种是在原模型的状态空间中增加一些表示偏差项的元素,利用滤波公式一并对偏差和状态向量做估计,即一步卡尔曼滤波;另一种是直接利用不含偏差项的滤波结果,对每个可能的偏差项作出估计,即两步卡尔曼滤波。
1.一步滤波法
一步滤波法将偏差b看作状态向量的一部分附加到原有的状态向量X中,一起参与平差计算,合并后的状态向量Y=(X,b)T,则式(8-1)变形为:
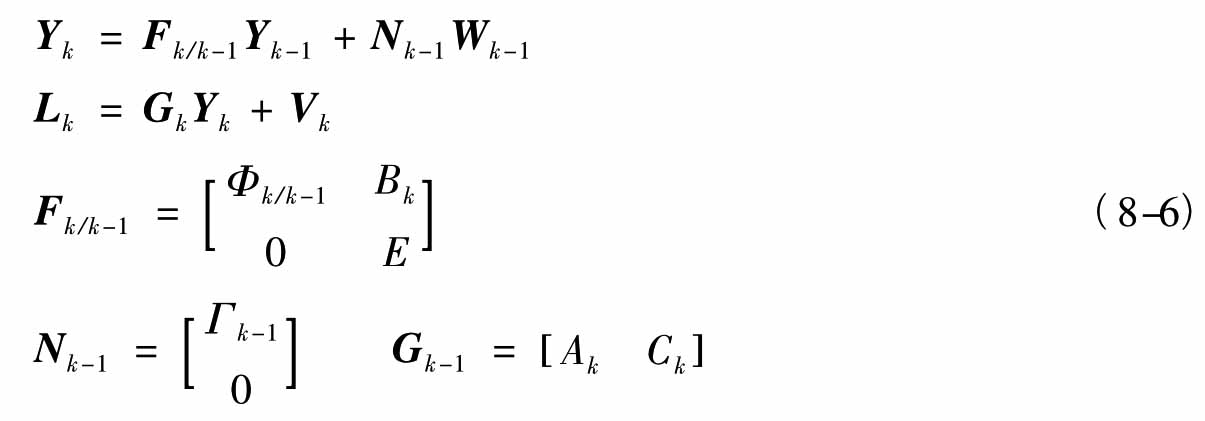
利用式(8-2)~式(8-4),解算Y,便得到了b。
一步卡尔曼滤波模型简单,但对先验统计特征要求严格,并非真正意义上的自适应滤波。
2.两步自适应滤波
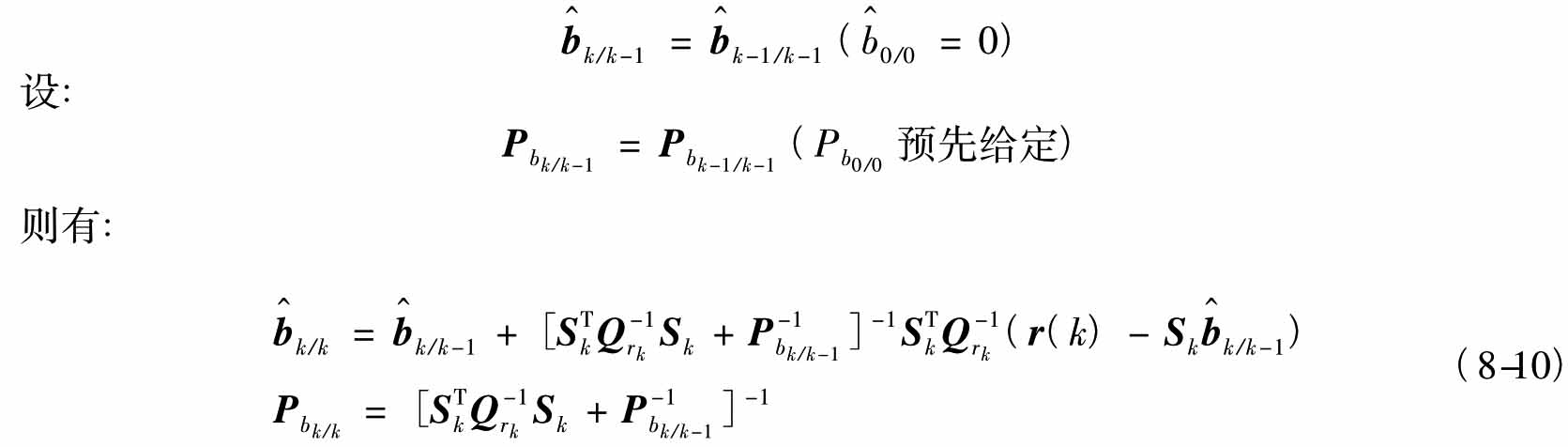
两步卡尔曼滤波克服了一步滤波的缺陷,适合后续的质量控制和滤波递推。首先通过一般的卡尔曼滤波,对 进行估计,并检验是否存在偏差b,若存在,进行第二步滤波。根据Frieland1969年和Lgnagni1981年的观点,b对估值的影响是线性的,故有:
进行估计,并检验是否存在偏差b,若存在,进行第二步滤波。根据Frieland1969年和Lgnagni1981年的观点,b对估值的影响是线性的,故有:

式中, 代表带有偏差的状态预测值和滤波值,
代表带有偏差的状态预测值和滤波值, 代表无偏差的状态预测值和滤波值。
代表无偏差的状态预测值和滤波值。
根据式(8-7),无偏差模型和有偏差模型所得残差预报之间关系为:
![]()
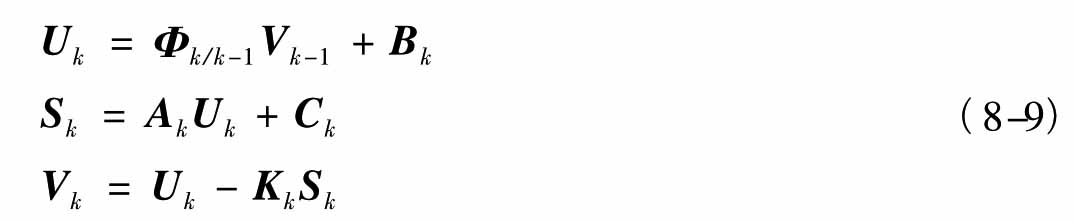
式中,r(k)和 分别代表无偏差模型和有偏差模型的预报残差。Uk、Vk、Sk代表敏感矩阵,可由下列递推公式确定:
分别代表无偏差模型和有偏差模型的预报残差。Uk、Vk、Sk代表敏感矩阵,可由下列递推公式确定:
敏感矩阵确定下来之后,便可进行第二步卡尔曼滤波,其递推过程如下:
 确定后,对
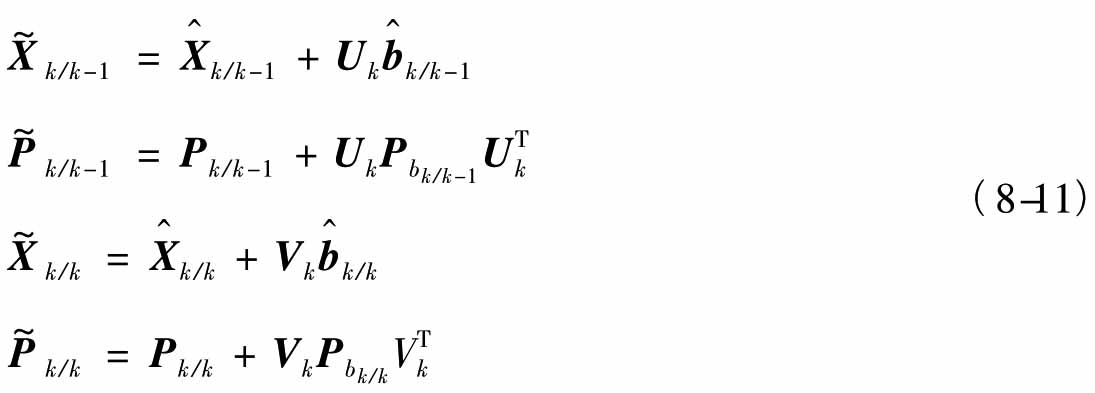
确定后,对 进行修正,则顾及偏差影响的状态最优预测和滤波估值为:
进行修正,则顾及偏差影响的状态最优预测和滤波估值为:
第k个历元的两步滤波完成后,便可进行下一个历元的滤波。
由于测量中不可能每个历元都存在偏差。为了提高滤波效率,需先定位偏差,再做自适应滤波。
3.预测残差χ2检验偏差
该法是根据检验统计量TG确定接受或拒绝法则,设d为χ2分布的自由度,则:

设r为预报残差,从l历元开始,由后续n个历元得到残差序列为r=(rl,rl+ 1,…,rl+ n),r~N(0,Qr)。若r无偏,则服从正态分布,为零均值,否则,不为零均值,且偏离量为Sr b,即r~N 。则TG为(李德仁,1988):
。则TG为(李德仁,1988):
![]()
若n= 0,则有:
![]()
式(8-14)表明,仅利用当前的观测信息即可进行偏差检验,即局部预警检验。
4.偏差定位和自适应消除
数据探测是对每个假设检验的偏差源分别进行定位检验,直到检验到全部可能的偏差。
根据式(8-13),仅利用当前信息进行局部检验,在H0下有:
![]()
综上所述,自适应卡尔曼滤波的计算流程可分为四个阶段。
(1)第一步滤波。利用式(8-2)~式(8-4),进行一般卡尔曼滤波。
(2)偏差检验。根据外部测量信息和系统输出信息构筑残差序列,并根据该序列构建统计量,在χ2分布下执行假设检验,判断是否存在偏差。
(3)偏差定位。若探测到偏差,启动备选假设,利用式(8-6),逐一进行诊断定位,将最有可能的偏差识别出来。
(4)第二步滤波。若定位了偏差,则根据式(8-9)、式(8-10)确定偏差量,根据式(8-11)进行第二步滤波,在第一步滤波的结果中消除偏差对Xk及Pk的影响,实现对偏差的修正。
上面介绍了卡尔曼滤波基本原理。卡尔曼滤波为组合导航系统信息融合提供了理论支持,在此基础上,下面介绍不同的水下组合导航系统。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










