



子模块八 雷达显示器
学习目标:掌握雷达显示器组成及各部分作用;
了解雷达显示器图像显示原理;
掌握雷达各种显示方式及其图像特点。
重点难点:雷达各种显示方式及其图像特点。
一、主要技术指标
船用雷达显示器是一种平面位置显示器,简称PPI(Plane Position Indicator),常用极坐标表示,扫描中心代表天线位置(即本船位置),物标回波以距离扫描线上的加强亮点表示,回波亮点至扫描中心之间的距离代表物标距离。扫描线随天线同步旋转,从船首(或真北)至回波亮点之间的夹角表示物标舷角(或真方位)。
对船用雷达显示器的主要技术要求:
(1)要满足要求的观测范围。距离:最小作用距离Rmin至最大作用距离Rmax;方位:0°~360°;
(2)要满足测量精度要求;
(3)要满足图像分辨力要求;
(4)要便于操作和使用简便。
二、显示器组成及各部分作用
(一)显示器的组成
显示器的组成框图如图1-32所示。它由阴极射线管及其附属电路(包括灯丝、辉亮控制、聚焦、第一阳极电压、特高压、中心位移等电路)、距离扫描电路(方波产生器、扫描电路及偏转线圈)、方位扫描电路、刻度系统(包括固定距标、活动距标、船首标志、电子方位标志及机械方位装置等)、视频混合放大器、抗雨雪干扰电路、抗同频干扰电路及显示器电源等部分组成。图中未画出电源部分。显示器各部分主要波形时间关系如图1-33所示。

图1-32 显示器组成框图

图1-33 显示器各部分主要波形时间关系
(二)阴极射线管及其附属电路
阴极射线管,常写作CRT(Cathode Ray Tube),又称显像管。雷达中常用的显像管有两种:电子束聚焦和偏转都是用管颈外的线圈产生的磁场实现的电磁式显像管;另一种是电子束的聚焦,用管内电极产生的电场实现,而电子束的偏转是用管颈外的线圈产生的磁场实现的混合式显像管,其结构如图1-34所示。
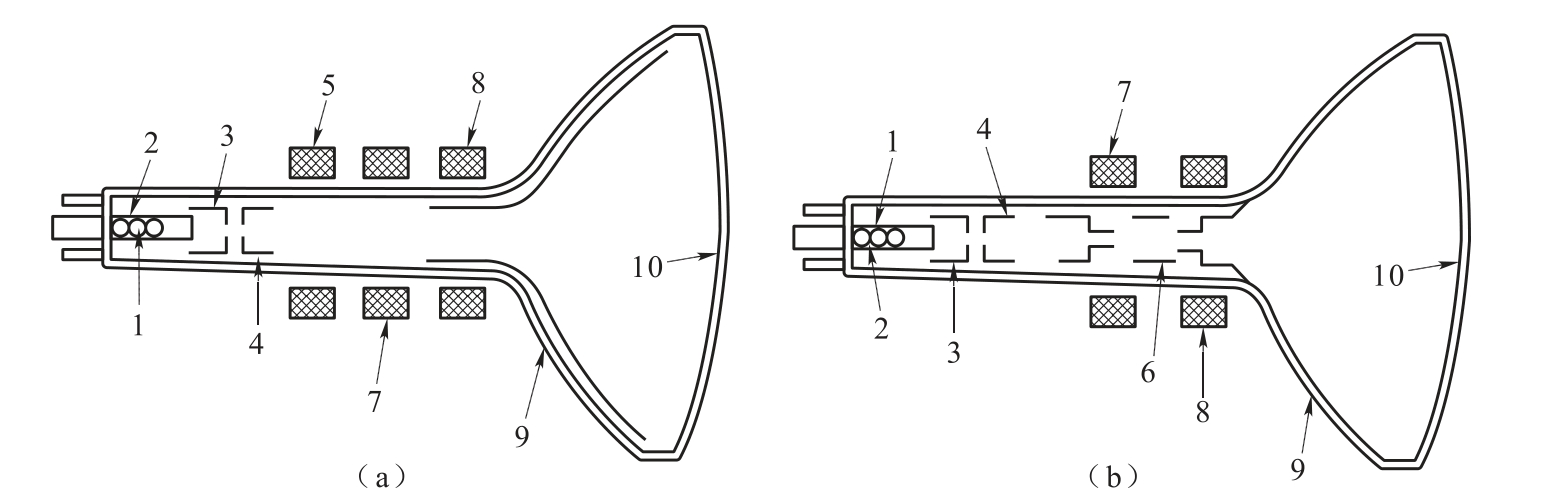
图1-34 显像管结构
(a)电磁式;(b)混合式
1—灯丝;2—阴极;3—控制栅极;4—第一阳极;5—聚焦线圈;6—聚焦电极;
7—中心位移线圈;8—偏转线圈;9—第二阳极;10—荧光屏
工作时,在CRT灯丝上一般加交流6.3V,以加热阴极。阴极为信号极,加入负极性回波视频脉冲信号及各种刻度脉冲信号。控制栅极加可调偏压(用面板上“亮度”钮控制)和正极性方波(称辉亮方波,用以控制阴极只在扫描持续期内发射电子)。第一阳极加+600V电压以加快电子速度。在聚焦线圈(电磁式CRT)中加聚焦电流或在聚焦电极(混合式CRT中)上加聚焦电压,实现电子束的聚焦。第二阳极加约+10 000V特高压,加快电子束的速度,轰击荧光屏。
荧光屏内壁涂有荧光粉,在电子束的轰击下会发光。随着涂的材料不同,所发光色也不同。中心位移线圈分水平和垂直两组线圈,分别通以可调的直流电流,用以调整扫描中心在屏上的位置。如果两个直流电流由真运动部件控制,则扫描中心可按本船航向、航速在屏上移动,即实现真运动显示。在偏转线圈中加入锯齿形电流,则使电子束匀速偏转,在屏上形成距离扫描线。
荧光粉在电子束轰击后,亮光会持续一段时间。从电子束停止轰击到发光强度衰减到初始值的1%的时间称为余辉时间。船用雷达CRT的余辉时间一般为6~8s,属长余辉。现代光栅扫描雷达则采用短余辉的CRT。
(三)距离扫描电路
距离扫描电路(Range Sweep Circuit)由延时线、方波产生器、梯波产生器及锯齿电流产生器组成。扫描电路的波形图如图1-35所示。
1. 延时线
延时线(Delay Line)的作用是用来调节扫描线的起始时间,使它和发射脉冲离开天线的时间严格对应,以保证测距的准确。
2. 方波产生器
在经延时的触发脉冲控制下,方波产生器(Flip-Flop)根据不同量程产生不同宽度的方波脉冲,分别送到锯齿波产生器、固定距标电路、活动距标电路、CRT辉亮控制电路,有的雷达还送到船首标志电路等。这样,显示器的扫描电路均在扫描方波的控制下同步工作,如图1-35(b)所示。
3. 梯波产生器
梯波产生器(Trapezoid Waveform Generator)在扫描方波控制下产生一个宽度与方波相同、斜率与量程相对应的梯形电压波,送锯齿波产生器。
4. 锯齿波产生器
锯齿波产生器(Sawtooth Current Waveform Generator)实际上是一个扫描末级功率放大器,它将梯形电压功率放大后通过两个滑环加到偏转线圈的两端,则在偏转线圈中就流过锯齿形电流。
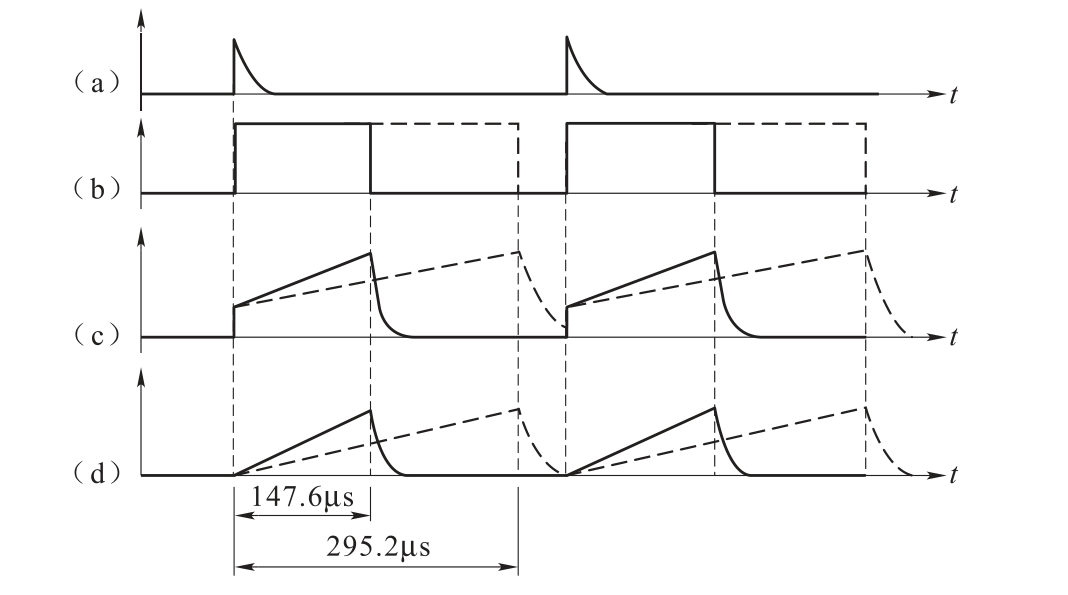
图1-35 扫描电路波形
(a)触发脉冲;(b)扫描方波;(c)扫描梯形波电压;(d)锯齿形电流
因为一台雷达用一个CRT,同一个屏半径要代表不同的距离(量程),即扫描光点从屏中心移到屏边缘所需要的时间不同,所以方波宽度不同。如12n mile量程,方波宽度至少为12×12.3µs=147.6µs;24n mile量程时,方波宽度至少为24×12.3µs =295.2µs。另外,由于屏半径一样,电子束从屏中心移到屏边缘所需要的锯齿电流最大幅度是一样的。假定为I0,那么,在12n mile量程时,在147.6µs的时间内将锯齿电流从零上升到I0;而在24n mile时,要变成在295.2µs的时间内将锯齿电流从零上升到I0。显然,上升速度要减小一半,即扫描速率要减小一半。通常,显示器内有方波宽度电位器,可调最大量程的方波宽度。每个量程有一个扫描速率电位器,用来调整每个量程的扫描速率。
(四)方位扫描系统
按偏转线圈转与不转可分为“旋转线圈式”和“固定线圈式”两种。
1. 旋转线圈式方位扫描系统
旋转线圈式方位扫描系统(Rotable Deflection System)又可分为同步机型(Synchro)和发电机型(Generator)两种类型。现以同步机型为例说明方位同步的过程。
(1)船首向上(Head-up)相对运动显示时的方位扫描系统
系统构成原理如图1-36所示。图中,同步发送机装在天线底座里,其他部件装在显示器里。雷达工作时,方位同步发送机转子通以中频交流电(有的通以交流船电),随天线同步旋转。于是,方位同步发送机三相定子中产生感应电动势并分别加到显示器同步接收机的三相定子绕组,便在其中产生旋转磁场。同步接收机转子未随磁场旋转,即偏开磁场一个角度,因而就感应出一个误差信号,这个误差信号送到伺服放大器放大后驱动伺服电机转动。伺服电机同时带动偏转线圈及同步接收机转子随着旋转磁场,即随着天线同步旋转。这样,同步接收机转子始终与旋转磁场保持一个很小的角度同步旋转,即扫描线随天线同步旋转。
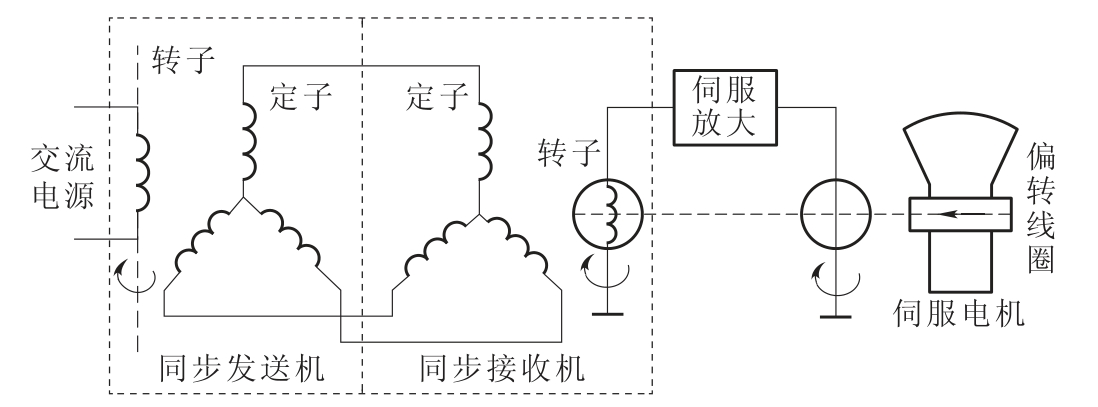
图1-36 船首向上相对运动方位扫描系统
(2)真北向上(North-up)相对运动显示方式方位扫描系统
系统构成原理如图1-37所示。由图可见,该系统仅比上述系统多了一个差动同步机。差动发送机定子绕组与同步发送机定子绕组相连,而转子绕组与同步接收机定子绕组相连,并且由罗经复示器带动指向航向值。这样,差动同步机转子绕组中输送到同步接收机定子中的合成磁场的转角是天线转角和罗经航向角之和,所以偏转线圈要比天线多转过一个航向角,即船首线不再指固定方位盘0°(此时0°代表真北)而指向航向值。

图1-37 真北向上相对运动方位扫描系统
要注意两点:
① 该显示方式必须接入罗经航向信号;
② 应经常注意船首线指向是否与主罗经航向一致。
2. 固定线圈式方位扫描系统
在固定线圈式方位扫描系统(Fixed Deflection System)中,要使扫锚线旋转,必须使偏转线圈中的磁场随天线同步旋转。一般是将偏转线圈做成两个互相垂直的线圈,并分别通以幅度成正余弦关系的两个锯齿电流,则偏转线圈中的磁场就旋转了,如图1-38所示。这是通过方位分解器来实现的。
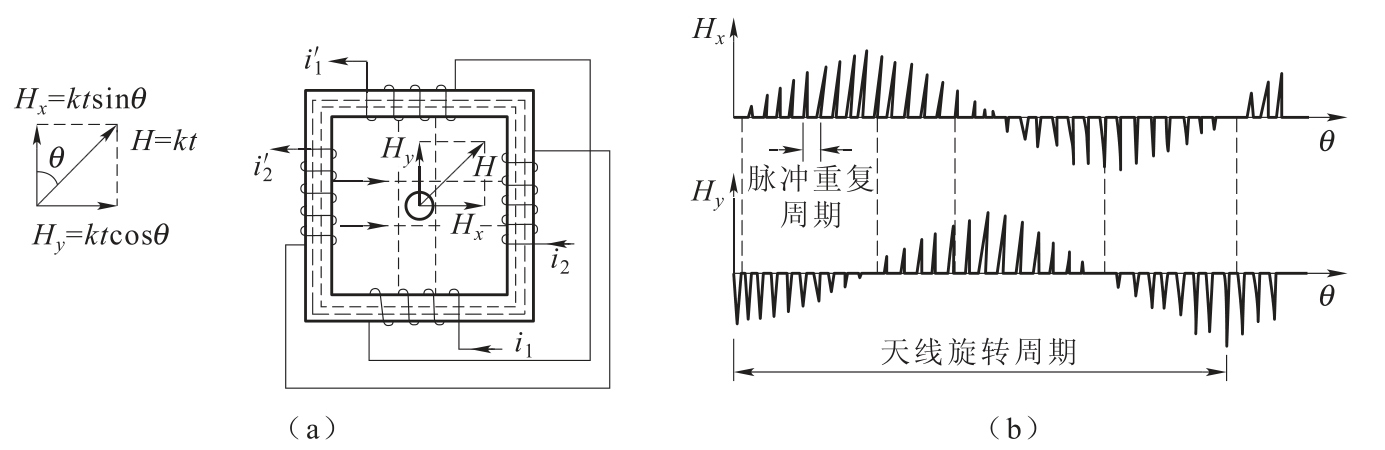
图1-38 固定线圈式方位扫描系统原理
(a)固定偏转线圈式原理;(b)固定偏转线圈中的Hx、Hy的关系
图1-39是一种产生两个幅度成正余弦关系的锯齿电流的电路。图中,方位分解器装在天线上,其余部分装在显示器里。转子中通以锯齿电流,转子随天线旋转时,则在两个相互垂直的定子中便产生幅度成正余弦关系的锯齿电流。这两个电流分别通入对应的偏转线圈,则可使扫描线随天线同步旋转。偏转线圈和方位分解器也可做成三相式的。

图1-39 固定线圈式方位扫描电路框图
定圈式扫描有如下一些优点:
(1)在使用三相式固定偏转线圈时,实现偏心显示和真运动时不需加中心位移线圈;
(2)去掉了复杂的机械、电气传动装置,不仅省掉了麻烦的维护、保养工作,减小了噪声,而且提高了可靠性。
(五)刻度(测量)标志电路
1. 固定距标电路
固定距标电路(Fixed Range Ring Circuit)在扫描方波的控制下产生一列等间隔的尖形脉冲,经视频混合放大器放大后送CRT阴极,则在荧光屏上出现一列等间隔亮点,扫描线旋转时,在屏上形成等间距的同心圆圈。量程不同,间距代表的距离也不同。这些标志的间距在厂里是用精密仪表精确校准的,常用作活动距标校准的依据。距标圈的亮度可由显示器面板上的“距标亮度”控钮调节。
固定距标的圈数和精度在雷达性能标准中有规定。近量程(1.5n mile以下)一般为2~3个;远量程(1.5n mile及以上)为6个。固定距标圈用于粗测目标距离,测距误差不应超过所用量程的1.5%或70m。
2. 活动距标电路
活动距标电路(Variable Range Marker Circuit)的作用是在触发脉冲(或扫描方波前沿)控制下产生一个相对于扫描起始点的延时可调的(由测距器决定)尖脉冲,经视频混合放大器放大后送CRT阴极,在荧光屏上产生一个可移动的距标圈。移动的距离由测距器决定,相应的距离值由专用读数器给出。
活动距标圈用来精测屏上任意位置的距离。其测量误差不应超过所用量程的1.5%或70m。活动距标圈的亮度可由显示器面板上的“活动距标亮度”控钮调节。
要注意的是:如果该距标电路是用比较电路产生距标的,则应随时用固定距标校核活动距标的精度。
3. 船首标志电路(Heading Marker或Heading-flashing Line,HL)
(1)作用。该电路的作用是每当天线转过船首方向时,产生一个宽度大于2倍脉冲重复周期的船首标志方波脉冲,经视频混合放大器放大后送CRT阴极,则在屏上产生一条代表船首方向的径向亮线——船首标志线,简称船首线。
(2)分类。常见的船首标志电路有触点式与无触点式两种。
触点式电路由装在天线上的微动开关(或干簧管)、凸轮(或磁铁)及显示器视频电路内的船首标志形成电路组成,每当天线转过船首时,开关闭合一次,送出一个触发信号,船首标志电路便产生一个船首标志方波脉冲。
无触点式船首标志电路有用发光二极管及光敏三极管的,也有用同步机某一相定子绕组感应信号的。同步机某相定子绕组感应信号的包络是被天线旋转所调制的,即天线旋转一周,相应的包络幅度也变化一周,只要设法取出包络从负到正经过的零位作为过船首的触发信号,并用于控制船首标志产生电路,就能产生船首标志方波。
天线上的微动开关(干簧管)、光敏发光二极管、同步机定子的位置都是可以移动的,这样就可以改变船首线在屏上出现的位置,即校正方位误差。
船首线是测量物标回波方位的基准。船首线位置不准直接影响测方位误差,所以使用中应经常注意核对船首线位置是否准确。性能标准规定,船首线的宽度不应大于0.5°,位置误差不应大于1°。
显示器面板上还设有一个常闭的弹簧开关,按住它(断开)可暂时去掉船首线,以便检查船首线处有无回波存在。
4. 电子方位标志电路(Electronic Bearing Line,EBL)
(1)作用。该电路的作用是产生一条方位可调的径向亮线,用以测量目标的方位。其产生原理与船首线标志电路类同,只是标志形成时的触发信号是由方位手轮调节“触点开关”位置决定的。方位手轮同时控制方位读数器,随时指示方位值。
(2)优缺点。用电子方位标志器测量方位无视差,精度高,且适用于偏心显示时测量物标方位。使用中应经常校核它的测量精度,即扫描中心与屏中心一致时,EBL所指固定方位刻度盘的读数与它的读数窗读数是否一致。电子方位线的亮度可由面板上的“EBL亮度”钮调节。这种方法产生的EBL固然有很多优点,但调整位置较慢(扫描线每转一圈EBL才亮一次)。
现在利用“间扫法”产生电子方位线,使用非常方便。一般主扫描线扫描30次,停扫一次,让给EBL扫描一次。对于脉冲重复周期1 000µs的雷达,EBL每隔0.03s就可亮一次,所以在调节时可看到电子方位线在屏上连续移动。
此外,新型船用雷达中还加设了电子游标线。这种游标线的原点在荧光屏上的位置可以任意调节,而且有的还可根据需要令它随扫描中心一起移动或停在原处不动。游标线的方位可用“方位”控钮调节并在读数器上随时指示方位值。在游标线上还设有间距可任意设置的固定距标点和活动距标点。使用此游标线可方便地测出任意两物标间的距离和方位,因此用它进行雷达标绘和导航非常方便。
想一想
雷达显示器是如何显示物标的距离和方位的?
(六)视频放大电路(Video Amplifier Circuit)
1. 抗雨雪干扰电路(Fast Time Constant,FTC)
雨雪也能反射雷达波,其回波图像呈棉絮状回波亮斑,无明显边沿。热带大暴雨的回波很强,能淹没雨区中的物标回波。因为雷达无法分辨相邻雨点间距或雪片间距,所以雨雪产生的回波是很宽的视频脉冲。雨雪干扰抑制电路通常是接在显示器回波视放输入电路中的一个微分电路,亦叫FTC电路。其作用是将宽回波视频信号微分变窄以抑制雨雪干扰,同时,它突出了回波的前沿,提高了距离分辨力,如图1-40所示。使用中应注意有可能丢失小物标回波。只应在雨雪干扰严重时使用。在显示器面板上设有“FTC”钮,供选择使用。

图1-40 微分电路作用
(a)合成视频;(b)微分;(c)削波输
现在性能标准规定FTC电路应能手动可调,可以根据具体情况调节微分程度。调节时应以只去掉雨雪干扰而不致丢失物标为好。
2. 雷达同频干扰抑制电路(Defruiter;Radar Interference Canceler,RIC)
两台距离相近的同波段雷达同时工作,相互间产生的干扰图像称为雷达同频干扰。因为两台雷达的脉冲重复周期不会绝对相同,所以这种干扰又叫同频异步雷达干扰。因为这种干扰是有源干扰,所以干扰波很强。干扰图像视两台雷达的脉冲重复频率差异程度而不同:若脉冲重复频率相同,图像为辐射状虚线图像;若脉冲重复频率相近,图像为螺旋线状;若脉冲重复频率相差很大,则图像呈散乱光点。另外,螺旋线状图像还会随量程变小而逐渐变直。
抑制同频干扰的原理是利用物标回波在若干次相邻的扫描线上的位置是相关的,而同频干扰则是不相关的特性,用“与门”电路将若干次扫描线上的信号进行“与”运算,显然,物标回波将保留输出,而同频干扰将被剔除。如图1-41所示(图中,S1、S2为物标回波,I1、I2为干扰信号),即将前两周的视频信号延时两个周期,将前一周的视频信号延时一个周期,然后与当前这个周期的视频信号(第三个信号)一起送入“与门”输入端,则输出端仅保留物标回波信号。

图1-41 抑制同频干扰原理
在实际电路中,在送入与门电路时,先要进行量化和数字化,然后存入存储器。在进行量化时,要设置门限电平,高于此门限的认为是回波或干扰信号,低于这个电平的所有信号被认为是噪声而被剔除,实际上很难设置理想的门限电平,所以必然要丢失一些弱小信号。
使用中应该注意:
(1)只有在干扰严重、影响观测时才使用它,因为可能要丢失小目标;
(2)使用该抑制器前,要将“调谐”、“增益”及“STC”钮调至最佳状态,使屏上噪声斑点刚刚可见而回波饱满时抑制效果最好;
(3)为避免丢失更多物标,使用同频干扰抑制时,不要使用FTC电路。
3. 视频混合放大器
送入视频混合放大器(Mixed Video Amplifier)的信号有经FTC抗同频于扰处理的回波视频信号、固定距标信号、活动距标信号、HL信号和EBL信号等五种信号,经放大后变成20~40V的负视频信号,再经过视放末级功率放大器送入CRT阴极。
为使显像管的平均亮度在不同量程时保持不变,在视放电路的输入端设有钳位电路,以保持各个信号的直流电平始终稳定,使显像管上回波的亮暗能够体现回波信号的幅度大小。另一方面,为了防止回波信号强弱悬殊太大,造成屏上回波图像强的太亮,弱的太暗,甚至看不见,又设置了“总限幅电平调整”电位器。由于该电位器可调整输入到CRT的回波信号强弱的对比度,故又称“对比度调整”(Contrast)。
(七)显示器电源
显示器电源分为低压电源和特高压电源两部分。显示器机内设有若干保险丝。现代雷达、特高压电源及显示扫描电路等都要在雷达电源开关置“工作”位置时才供电工作。
三、显示屏显示物标图像的原理
我们知道,如果屏半径要代表12n mile量程,那么光点从屏中心移到屏边缘的时间应恰好等于12n mile处的物标回波回到天线所经历的时间,即147.6µs。也就是说,锯齿电流从零匀速上升到I(假定偏转线圈在此电流的作用下产生的磁场恰好把电子束偏转到屏边缘),所经历的时间也应该是147.6µs。假如6n mile处有物标B,12n mile处有物标A。在开始扫描后73.8µs,B物标回波将回到天线并经处理后送到CRT阴极,此时,扫描光点刚好扫到屏半径的1/2处的B′点,亮度就加大一下,得到B物标回波B′。在开始扫描后147.6µs时,A物标回波回到天线并经处理后送到CRT阴极,此时,扫描光点恰好扫到屏边缘的A′点,亮度加大得到A物标回波A′,如图1-42(b)所示。当量程改为24n mile时,扫描光点从屏中心扫到屏边缘要变成295.2µs,增大一倍。这样,B物标回波回到天线送到CRT阴极时,光点才移到73.8/295.2=1/4屏半径处,即B物标回波出现在1/4屏半径处,而A物标回波将出现在147.6/295.2=1/2屏半径处,如图1-42(c)所示,所以方波宽度和扫描速率要随量程改变:量程小,方波宽度可小些,扫描速率要快些;量程大,方波宽度要宽,扫描速率要慢。这是CRT显示物标距离的原理。

图1-42 CRT物标显示原理
(a)波形时间关系;(b)量程为12n mile时的物标显示;(c)量程为24n mile时的物标显示
CRT显示物标方位的原理是:偏转线圈的方向决定扫描线的方向(对于动圈式偏转线圈而言),而偏转线圈由方位扫描系统带动随天线同步旋转,即扫描线的方向也就对应于天线的方向。天线转到某个方位收到回波时,扫描线在屏上就指向相应的方位,回波也就在这个方位上显示。
四、光栅扫描
(一)径向圆扫描的缺陷
上面介绍的是通常所用的径向圆扫描方式,即极坐标方式。在这种扫描方式中,荧光屏上扫描线径向扫描的速率取决于量程的大小(同一荧光屏)。扫描线旋转的速度取决于天线的转速。物标回波的亮度取决于回波视频信号的幅度。这样,物标回波及各种符号视频在屏上只能是天线每转一圈才能亮一下,在整个屏面上亮度不匀,并且量程越小,回波亮度越低,越容易丢失小目标。模拟距离偏转电路的线性对于要精确保存物标距离信息来说非常勉强。目标分辨力主要靠接收机的增益时间常数和选定最小信号阈值提供。常规雷达要在屏上画其他符号(如ARPA符号)十分麻烦、困难,而且符号数量有限。
(二)光栅扫描原理
1. 光栅扫描雷达框图
雷达获取的信息是径向圆扫描方式,属极坐标方式;而TV显示器显示的信息是它的TV扫描方式(从左到右的行扫描和从上到下的帧扫描),属直角坐标的方式,所以要实现雷达数据的TV显示,首先要将雷达的极坐标信息转换成直角坐标信息存入存储器,再以TV扫描的方式从存储器中读出并显示出来。其简单的原理框图如图1-43所示。框图中,天线、收发机的作用与前面介绍过的一样,不再作介绍。下面简单介绍其余几个部分的作用。
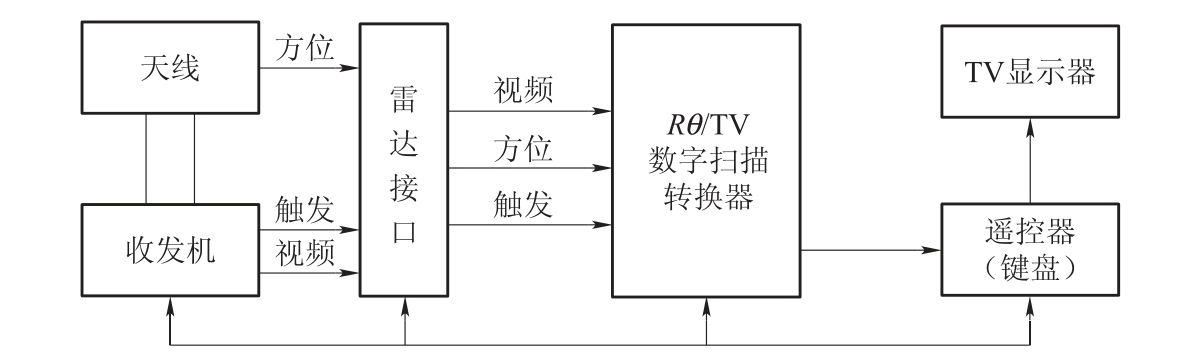
图1-43 TV显示雷达简框图
(1)雷达接口
雷达接口(Radar Interface)的作用是:
① 对雷达视频信号进行杂波抑制、量化处理及数字化;
② 将天线方位信号变换成数字信号(包括起始信号和方位量化单元信号);
③ 量程控制及再定时处理等。
(2)Rθ/TV数字扫描转换器(Rθ/TV Digitizing Scan Converter)
现在一般均采用数字式Rθ/TV转换器,其作用主要是:① 将视频信号进行Rθ/TV坐标转换,并以视频信号的幅度代码为内容、以转换得到的坐标为地址存入RAM中;② 产生TV扫描的行、场同步信号;③ 将按TV扫描方式从RAM中取出的视频信号和TV行、场同步信号按时序分割制混合成TV信号,经遥控部件送TV显示器显示。
(3)遥控部件(键盘)(Remote Controler)(Keyboard)
其作用是实现人机对话,实现对全机(包括天线、收发机、Rθ/TV转换器及CRT显示器)的控制,转送TV综合信号等。
(4)TV显示器(TV Display)
一般为电视显示器或监视器,其功能是显示各种雷达处理视频、存储视频及各种特定标志。
2. Rθ/TV数字扫描转换原理
Rθ/TV坐标转换的原理可用图1-44表示。先将雷达极坐标转换成以扫描中心为原点的雷达直角坐标:

图1-44 Rθ/TV扫描转换原理图
(a)Rθ/TV坐标转换;(b)雷达视频存储器
再将雷达直角坐标原点(扫描中心O)移到TV扫描直角坐标的原点O′:
![]()
采用数字技术时,方位角θ要等于方位量化单元Δθ 乘以从船首开始计数的方位单元数N,即 θ=N*Δθ。距离R等于距离量化单元ΔR乘以计数频率fc再乘以计数的时间(即从开始扫描起到回波到达天线止的时间)t:R=ΔRfct,则上述公式可写为:
![]()
然后,按求出的x′、y′坐标值为地址将物标回波的幅度数据等存入雷达视频RAM中。显示时按TV扫描规律再从RAM中取出送TV显示器显示出来。
(三)光栅扫描的优点
光栅扫描优点如下:
(1)便于实现高亮度显示。
(2)可避免常规PPI综合显示器图像的闪烁现象。
(3)便于采用彩色显示。
(4)便于实现大幅度偏心和大比例尺的显示。
(5)便于采用计算机显示终端技术。
(6)降低成本,提高了可靠性。
光栅扫描同时也存在一些缺点:图像的连续性不如PPI显示器,有的存在图像分裂、图像失真现象,定位精度有所降低等。这些缺点可以通过选用高分辨力彩色CRT、增加扫描行数及增加量化单元数等途径加以克服。
五、显示器调整和状态判断
(一)显示器调整
这里仅介绍船舶驾驶员常用的几种调整。
1. 延时线调整(触发脉冲延时调整)
调整的目的是使扫描起始时间与发射脉冲离开天线的时间严格对应,以消除固定测距误差。
调整的方法是:选一个2n mile以内、位置在海图上精确标明且轮廓清楚的物标,在海图上量出或用其他精确方法测出它的实际距离,然后与用雷达近量程档测出的距离比较。若不相符,就调节延时线上抽头位置,直到两个距离相等为止。
有的机器,触发脉冲的延时是用单稳态电路实现的,则它的延时调整更方便,调整此电路延时电位器即可。
2. 方位误差的调整
(1)选一个2n mile以外的目标,用其他航海方法测定它的准确舷角,再与雷达测得的以船首线为基准的舷角比较,如不一致即存在方位误差。
(2)选船首向上相对运动显示方式,扫描中心对准屏中心。
(3)移动天线上的微动开关位置,使屏上船首线移动,直至船首线与物标回波的夹角准确为止。
(4)调显示器方位同步接收机定子,使屏上船首线与图像一起转动,直到船首线准确指固定方位盘0°。
注意:显示器操作人员与天线上的操作人员必须保持密切联系,确保人身安全。另外,调整前松开的所有螺丝、螺母等,调整后必须全部恢复拧紧。必须按说明书操作步骤进行。
3. 真方位调整
如果真方位部件罗经复示器与主罗经不一致时,则仅须关掉真方位部件,然后拨动复示器度盘,使指示值与主罗经航向一致,立即接通真方位部件即可。
(二)显示器状态判断方法
下面按操作步骤逐步说明显示器的状态判断方法。
(1)将“雷达电源”开关开到“预备”位置,增大面板“照明”钮,面板照明灯应该亮。如果一个灯也不亮,应查显示器保险丝或中频电源输出总保险丝。如果保险丝均好,查中频电源的输出。
(2)3min后,“预备”指示灯应亮。如不亮,按“紧急”按钮,若雷达正常了,则是3min延时电路故障。若仍不工作,查电源。
(3)3min后,预备灯亮,将“雷达开关”放“工作”位置,增大“扫描亮度”钮,一般到4~5位置,屏上应能见到扫描线在匀速旋转。如果“亮度”钮旋到4~5位置,屏上有中心亮点出现,而无扫描线,说明CRT及CRT有关电路是好的,可能是扫描电路(梯波产生器,锯齿波产生器及其负载——偏转线圈、电刷、滑环等)有问题。一般雷达,锯齿波产生器电源有保险丝,可先检查一下此保险丝。如果“亮度”钮转到底,屏上才有亮点(有些机器,要将HL、VRM、EBI及固定距标亮度均开大才能见到),则说明CRT及CRT电路是好的,问题可能出在触发脉冲或方波产生器。如果“亮度”钮转到底,屏上什么也看不见,则CRT各供电或CRT本身有问题。
(4)“雷达电源”开到“工作”,“扫描亮度”钮旋到4~5位置,屏上应有扫描线,且匀速顺时针向旋转。转速与天线转速同步。具体转速可查说明书(有的机器,天线转速在近距档是快速的,远距档是慢速的)。如果扫描线不转,则看一下天线是否转。如果天线不转,则查天线驱动系统及电源电路。若天线转,则查方位同步传送系统。
(5)此时应能见到船首线,如果在船首线向上相对运动显示方式,扫描中心在屏中心,则船首线应指向固定方位圈0°。如果无船首线,则可再增大固定距标圈亮度、电子方位线亮度等。如果屏上有固定距标圈或电子方位线等标志,则说明船首线电路有问题。若各种标志均不出现,则可能是视频混合放大器及有关信号通路有问题。如果船首线不指0°,应调整之。
(6)旋大“固定距标圈亮度”钮,屏上应该出现等间隔距离圈。按标准规定,1.5n mile及以上各量程应为6圈,1.5n mile以下量程为2~3圈,最外圈应离屏边缘2~3mm。如果间隔不等,说明扫描线性不好。若距离圈太多,则说明扫描速率太慢。若距离圈太少,但间隔大,扫描线看不到头,说明扫描速率太快。如果在屏上可见到扫描线末端,此时,数固定距离圈圈数,如多于6.5圈,说明方波宽度太宽;如少于6.5圈,说明方波宽度太窄。
(7)旋大“活动距标亮度”钮,调测距器,使活动距标圈与各量程档、各固定距标圈(一般可查最里面一圈和最外一圈)重合时,读数应和该距标圈代表的距离相等。如不等,应调整或修理。
(8)旋大“增益”钮,屏上应有噪声斑点,调节“调谐”钮,应有回波出现。至此,可测目标方位、距离,校核雷达有无方位误差和距离误差。这在前面已进过。
(9)显示方式置“真北向上”显示方式,船首线应指航向值。如不对,应调整。
(10)检查各杂波抑制钮(如STC对数放大器、圆极化天线、FTC. CFAR、RIC等)作用是否正常。
需要注意:在显示器工作时,机内不应有异常噪音和气味等。
六、雷达显示方式
按代表本船位置的扫描中心在荧光屏上的运动方式,船用雷达可分为相对运动显示方式和真运动显示方式。本船(扫描中心)在屏上始终保持不动的显示方式称为相对运动显示方式,而在屏上按照本船运动而移动的显示方式称为真运动显示方式。真运动显示方式按照速度的输入源不同可分为计程仪真运动方式和模拟速度真运动方式,按照速度的类别它们又可分为对水真运动方式及对地真运动方式。
按照船首线的指向及所显示的物标方位,船用雷达的显示方式可分为(船)首向上、(真)北向上及航向向上等三种显示方式。下面分别介绍其图像特点。
(一)相对运动显示方式
1. 首向上图像不稳定相对运动(Head-Up Unstabilized Relative Motion)显示方式
这种显示方式的特点是:
(1)扫描中心代表本船位置在屏中心不动,显示周围运动物标相对于本船的运动状态,固定物标回波与本船等速反向移动;
(2)船首线固定指方位刻度盘的零度,代表本船船首方向。以它为基准,可直接测读物标的舷角;
(3)本船改向时,船首线不动,而物标回波反转,图像不稳,留下一段弧形尾迹。这在风浪中本船船首偏荡频繁时,会使图像模糊不清,影响观测精度。
以上特点可用图1-45来说明。图中画出海上实情与屏上显示情况。其中,本船在①位置时,屏上显示见①图:首线指0°,物标回波显示舷角为030°,距离为6n mile的A处。本船保向(050°)航行到②位置时,屏上显示②图:首线指0°,物标回波在正横90°、距离为3n mile的B处。当本船在②位置右转45°到095°的③位置时,屏上显示见③图:首线仍指0°,但物标回波左转45°至C处。距离仍为3n mile。这种显示较直观,便于判明来船在本船左舷还是右舷,适用于判断碰撞危险的场合。
为了发挥上述显示直观的优点,又克服不能测读物标真方位的缺陷,现在有些雷达在固定方位刻度圈外面或里面又套上一个可动方位刻度圈,也标有0~360°刻度。用手拨动或直接由陀螺罗经带动该刻度圈,并随时使航向值置于固定方位刻度圈的0°处。这样便可以在可动方位圈上方便地测物标的真方位,如图1-46所示。
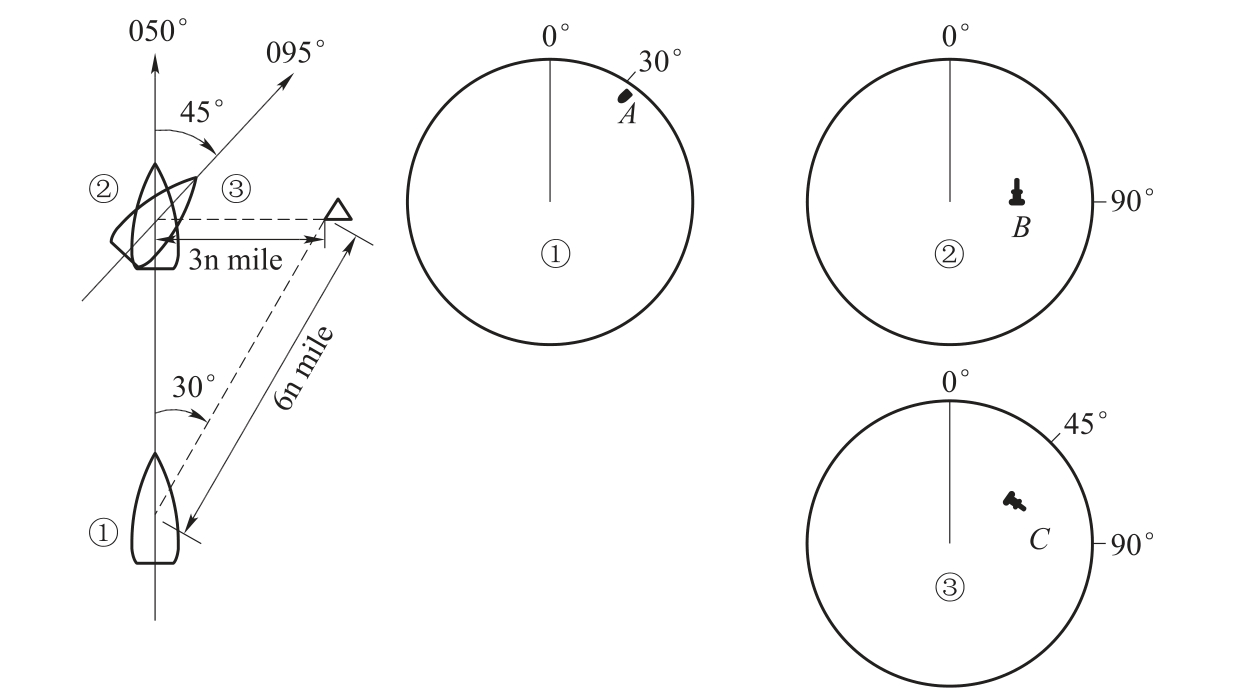
图1-45 首向上相对运动显示
2. 北向上图像稳定相对运动(North-Up Stabilized Relative Motion)显示方式
这种显示方式必须接入陀螺罗经航向信号,其显示特点有:
(1)扫描中心代表本船位置在屏中心不动,显示周围运动物标相对于本船的运动状态;固定物标回波与本船等速反向移动;
(2)固定方位圈的0°代表真北,船首线指航向,可直接测读物标真方位,因此这种显示方式有时又称为“真方位显示方式”;
(3)本船转向时,船首线随时指新航向值,而图像稳定。
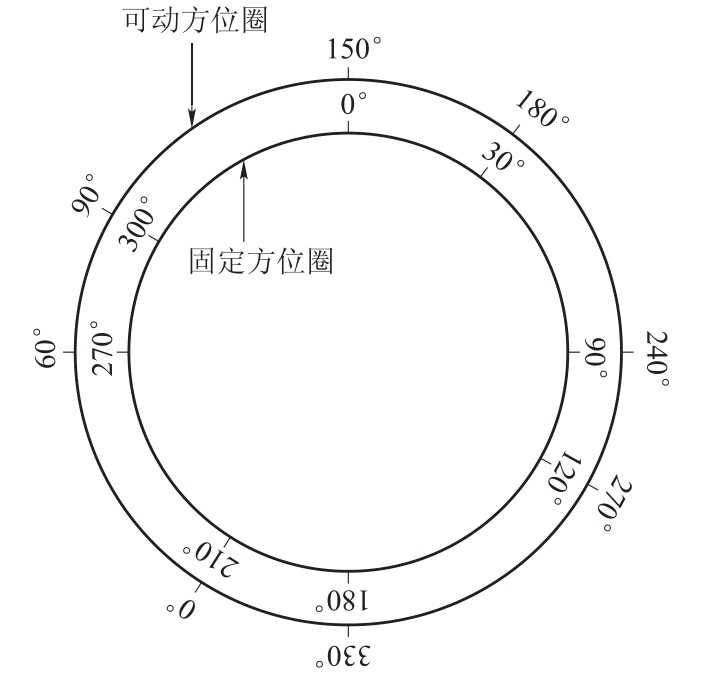
图1-46 可动方位圈

图1-47 北向上相对运动显示
以上特点可用图1-47来说明。图中,本船在①位置时,显示见图①中首线指050°、物标回波在真方位080°、距离为6n mile的A处;当本船保向(050°)航行到②位置时,屏上显示见图②:首线仍指050°,物标回波到正横、真方位为140°,距离为3n mile的B处;当本船在②位置右转向45°至095°的③位置时,屏上显示见图③:首线右转到095°,物标回波则仍在真方位为140°,距离为3n mile的C处不动。
这种显示方式可方便地测读物标真方位,且在本船转向或船首偏荡时,图像清晰稳定,故适用于定位。由于其图像指向和海图一致,在多改向的窄航道航行时,也便于将雷达图像与海图对照,以迅速确认本船船位。但这种显示方式的首线不固定在荧光屏上方,当航向在045°~315°、特别是在090°~270°之间时,观测不便,有时容易搞错物标在左舷还是在右舷,不利于避碰操作应用。
3. 航向向上图像稳定相对运动(Course-Up Stabilized Relative Motion)显示方式
这种显示方式综合了上述两种显示的优点,即:
(1)船首线指向屏上方,图像直观;
(2)因一般均有由陀螺罗经稳定的可动方位圈或电子方位刻度标志,故可直接测读物标的相对方位和真方位;
(3)本船转向时,首线随航向转动而固定物标回波不动,图像稳定。改向完毕只要按一下“新航向向上”(New Course-Up)钮,则首线、图像及可动方位圈一起转动,直到首线恢复指向固定方位刻度圈0°为止,故又可保持直观的观测。
这种显示方式的特点可用图1-48来说明:
图中本船在①位置时,显示见图①:首线指屏上方固定方位圈0°,从可动方位圈读得本船航向050°,物标回波显示在舷角为030°(从固定方位圈上读取)、真方位为080°(从可动方位圈上读取),距离为6n mile的A处。
本船保向航行到②位置时,显示见图②:物标回波从A处沿着和本船相反方向移动到正横3n mile的B处:舷角为090°,真方位为140°;

图1-48 航向向上相对运动显示
本船在②位置向右转向45°到航向为095°的③位置时,显示见图③:物标回波不动仍在B处,首线右转指到095°;
本船转向完毕,当按了“新航向向上”钮后,显示见图④:首线及可动方位圈的095°一起左转回到屏上方固定方位圈的0°处,物标回波也左转到相对方位045°的C处。
由上述可见,航向向上显示方式既具有船首向上显示方式的直观、便于判明物标回波在本船的左舷还是右舷的优点,又具有北向上显示方式的图像稳定、可直接测读物标真方位的优点,因而在避碰和定位应用中均较方便,故这种显示方式在现代船用雷达中得到广泛的运用。
(二)真运动显示方式
1. 北向上真运动显示方式
为便于理解,假定海面无风无流,罗经输入的航向和计程仪输入的航速数据都准确。则其显示特点如下:
(1)固定方位刻度圈0°(即上方)代表北,船首线指向实际航向值;本船转向时,船首线移动;其他物标不动;
(2)扫描中心在屏上按计程仪或人工置入的速度沿着船首方向(航向)移动;
(3)屏上其他物标按它们各自的航向、航速移动,固定物标则在屏上不动。
因此这种显示方式就像在陆地上所看到的海面上的实际情况一样,如图1-49所示。

图1-49 北向上真运动
这种显示方式在狭水道航行时就很直观、方便。由于海岸、浮标等固定物标在屏上不动,这对在近量程上观测高速航行的船时保持屏面的清晰起了很大作用。但是,当航向处在090°~270°之间时,观测、使用起来就不大习惯,有时还容易搞错左右舷,对必然及航行造成不利。
2. 航向向上真运动显示方式
与相对运动显示方式一样,如果采用了航向向上真运动显示方式,则可避免前述弊病。其特点和操作与相对运动的有关显示方式相同,并具有上述真运动特点,这种显示方式的操作及实现方法也与相对运动有关显示方式相同,不在重述。如图1-50所示。

图1-50 航向向上真运动
3. 对地真运动和对水真运动显示方式
在对上述两种真运动方式的学习时都假定了海面无风无流,航速和航向都无误差的条件。现实工作中这种情况很少见。
如果海区有风流,而速度输入仍是对水速度(如用水压式或电磁式计程仪),航向输入仍是电罗经航向(未校正风流压),则此时的真运动是对水(稳定)真运动,不是对地真运动,如图1-51(a)所示。M为本船,假定航行了18min,则M点按对水计程仪输入的速度及电罗经输入的航向从M0到M18点。动目标W按它自己对水的速度及航向从W0移到W18,而固定物标B则由于本船计程仪输入的速度及电罗经输入的航向未计入流的影响而在屏上产生移动从B0移动B18。也就是说在这种显示方式中,固定物标要按风流的影响(风流压差的方向和速度)移动,动目标尾迹表示该目标的对水速度及航向,本船船首线在航行中是稳定的。
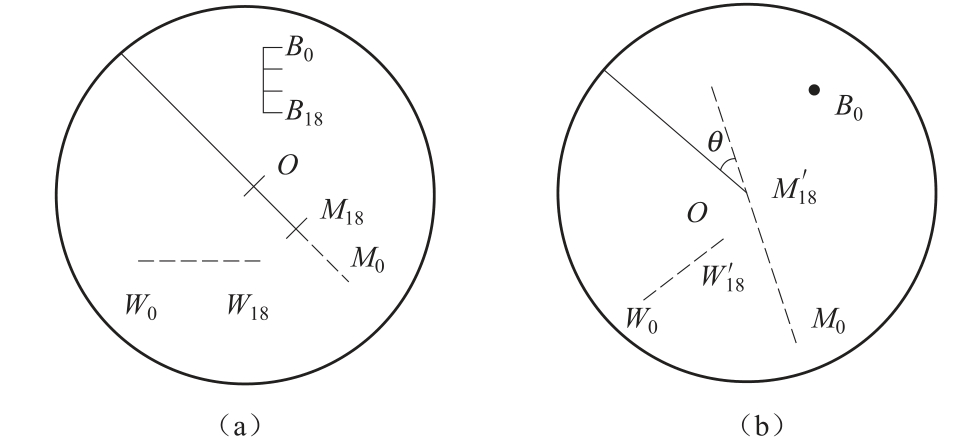
图1-51 对地及对水真运动
如果速度输入由双轴多普勒计程仪或用人工方法(航迹校正钮)将风、流的影响校正后,则本船中心将按实际的航迹向及对地实际速度运动,此时的真运动为对地(稳定)真运动,如图1-51(b)所示。本船航向(船首线指向)与航迹线不一致,有一个偏差角θ,并可见到船首线沿航迹向有平移的尾迹,本船移动的距离也变了,从M0移到M′18,固定目标B在屏上不动,仍在B0处。动目标W在屏上的移动方向和轨迹也已不是它的航向和对水航速,而是它的航迹向及对地速度,从W0移到W′18处。
为此,在狭水道导航时常用对地真运动,而在标绘、计算及判断有无碰撞危险、采取避碰措施时应用对水稳定真运动。
4. 模拟真运动显示方式
模拟真运动显示方式与计程仪真运动显示方式的区别仅在于航速输入方式不同。此方式下,本船航速是由人工置入而非计程仪提供。只要人工置入的航速与实际航速一致(对地或对水速度均可),则图像显示的特点与计程仪真运动显示方式完全相同。
模拟真运动显示方式的选用场合为:
(1)本船计程仪故障,无法使用时;
(2)本船靠岸检查和修理雷达真运动显示方式时,可采用人工置入方式检查扫描中心是否能输入航速、航向在屏上正常移动。无此显示方式,则无法在靠岸或系泊时检查真运动显示方式正常与否。
想一想
雷达显示方式有哪几种?各有何特点?如何选用?
思考与训练
1. 使用雷达显示器中的“雨雪开关”将会________。
A. 提高接收机灵敏度 B. 对雨雪干扰宽脉冲进行微分处理
C. 使显示器上看到的回波增强 D. 使回波增强,同时杂波也增强
2. 同定距标圈已够6圈,但间隔疏密不匀,这种情况说明________。
A. 扫描梯波线性不好 B. 辐射脉冲宽度不够
C. 方波宽度不够宽 D. 三者均不是
3. 雷达中产生锯齿形电流的电路称为________电路。
A. 触发脉冲 B. 距离扫描 C. 扫描方波 D. 定时
4. 雷达扫描亮度通常是通过________来调节的。
A. 扫描方波电路 B. 改变锯齿形电流的大小
C. 控制显像管灯丝电压 D. 控制显像管栅极负偏压
5. 船用雷达的显示方式特点是________。
A. 平面距离扫描显示 B. 平面位置显示
C. 平面高度扫描显示 D. 高亮度旋转显示
6. 在航海雷达显示器荧光屏上,可测得目标的________。
A. 水面以上的高度 B. 方位和距离
C. 水面以上的形状 D. 水面以上的大小
7. 在狭水道航行,雷达显示方式应选择________。
A. 船首向上相对运动 B. 北向上相对运动
C. 对水真运动 D. 对地真运动
8. 本船转向时,显示器荧光屏图像稳定,则采用的显示方式是________。
A. 船首向上相对运动显示 B. 北向上相对运动显示
C. A和B都对 D. A和B都不对
9. 在雷达船首向上相对运动显示方式中,当本船转向时,荧光屏上船首线及目标情况如何________?
A. 首线不动,目标随之移动 B. 首线随之移动,目标不动
C. 首线及目标均随之移动 D. 首线及目标均不动
10. 扫描中心在荧光屏上按本船的航向和航速的比例运动,由罗经和计程仪提供本船航向和速度信号,雷达图像反映了船舶、物标相对海面的真实的运动情况,这种显示方式称之为________。
A. 船首向上相对运动显示方式 B. 北向上相对运动显示方式
C. 对水真运动显示方式 D. 对地真运动显示方式
11. 使用雷达进行避碰操纵最好选择的显示方式是________。
A. 对水真运动 B. 对地真运动
C. 船首向上相对运动 D. 真北向上相对运动
12. 调雷达“聚焦”旋钮,应调到________。
A. 中心亮点最亮 B. 中心亮点最大
C. 目标图像最大 D. 固定距标圈最细
13. 在对水真运动显示方式中,雷达荧光屏上回波图像不动的目标应是________。
A. 同向同速船 B. 如小岛等固定目标
C. 随水漂流目标 D. 反向同速船
14. 北向上真运动显示方式最适用于________。
A. 定位 B. 宽阔海域了望 C. 避碰 D. 狭水道航行
15. 光栅扫描显示与径向圆扫描不同在于________。
A. 将常规径向圆扫描用的极坐标转换成直角坐标
B. 由实时显示转换为非实时显示
C. A+B都是
D. A+B都不是
16. 船用导航雷达显示器属于下述哪种显示器________?
A. 平面位置显示器 B. 仰角高度显示器
C. 距离仰角显示器 D. 距离深度显示器
17. 采用北向上真运动显示本船旋转时,________。
A. 雷达图像反向旋转 B. 船首线旋转雷达图像不转
C. 雷达图像正向旋转 D. 和船首向上显示方向一样
18. 雷达荧光屏上看到真北指零刻度,而船首线指示本船航向,该显示方式为________显示。
A. 相对方位 B. 真方位 C. 真运动 D. 模拟运动
19. 某雷达扫描线扫不到荧光屏边缘,且固定距标圈圈数不够,出现这种现象的可能原因是________。
A. 扫描速度太慢 B. 扫描速度太快 C. 扫描方波太窄 D. 扫描方波太宽
20. 距离扫描电路的作用是产生锯齿电流,从而在荧光屏上形成________。
A. 电子方位线 B. 船首标志线 C. 扫描线 D. 距标圈
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。









