



【摘要】:码垛机械手是研制开发的新机型,质量稳定,性价比高。码垛机械手的程序里所需要定位的只有两点,1个是抓起点,1个是摆放点,这两点之间以外的轨道全由电脑来控制,电脑自己会寻找这两点的最合理的轨道来移动,所以教示方法极为简单。机械手原理上属于直线运动。本设备适应于化工、饮料、食品、啤酒、塑料等自动生产企业;对各种纸箱、袋装、罐装、啤酒箱等各种形状的包装都适应。
机器人IO输出、while、IF循环练习、变量定义练习、赋值指令、相对坐标练习。
码垛:堆放物品的一种机器。
码垛机械手是研制开发的新机型,质量稳定,性价比高。 码垛机械手的程序里所需要定位的只有两点,1个是抓起点,1个是摆放点,这两点之间以外的轨道全由电脑来控制,电脑自己会寻找这两点的最合理的轨道来移动,所以教示方法极为简单。 机械手原理上属于直线运动。 本设备适应于化工、饮料、食品、啤酒、塑料等自动生产企业;对各种纸箱、袋装、罐装、啤酒箱等各种形状的包装都适应。
任务1:利用现有知识(IO输出、轨迹规划等)完成码垛练习。
任务2:在任务1的基础上,缩减示教点,以最少的示教点完成该码垛练习。
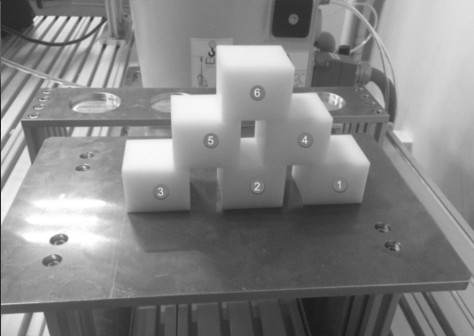
按如图所示进行码垛练习。

任务1流程:

任务2流程:
◇一定要了解清楚抓取位和码垛位以方块1为零点,其余5点的相对位置坐标。
◇在抓取工件和放下工件后,一定要设置延时1s上。
◇程序编写完成后,一定要以单步运行的方式完整地运行一遍程序,以保证安全。
◇在使用f定义变量的时候,每次从主程序启动,都需要对f进行初始化(赋值f=1即可)。
(1)建立IO(抓手)(参考应用实例一)
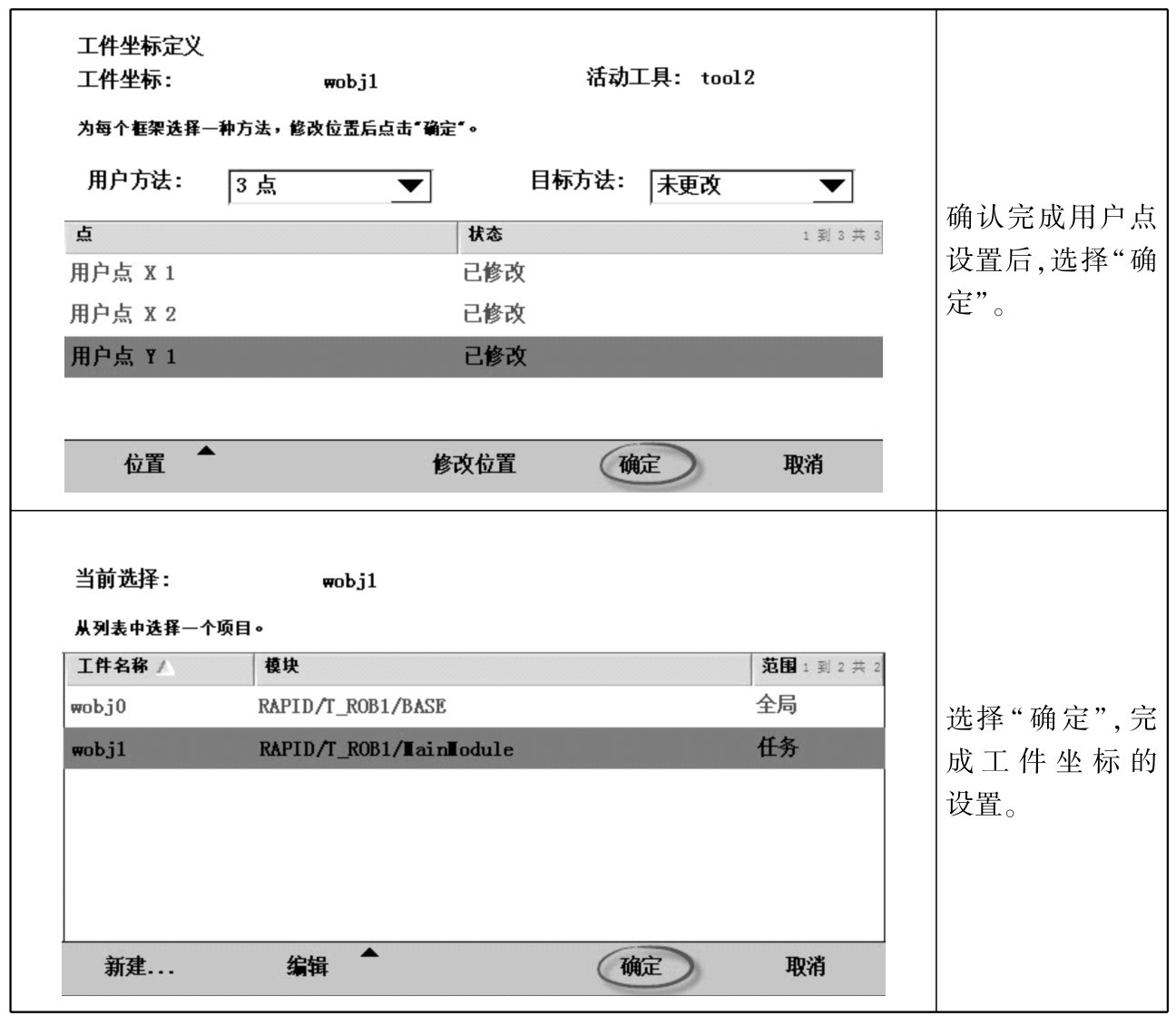
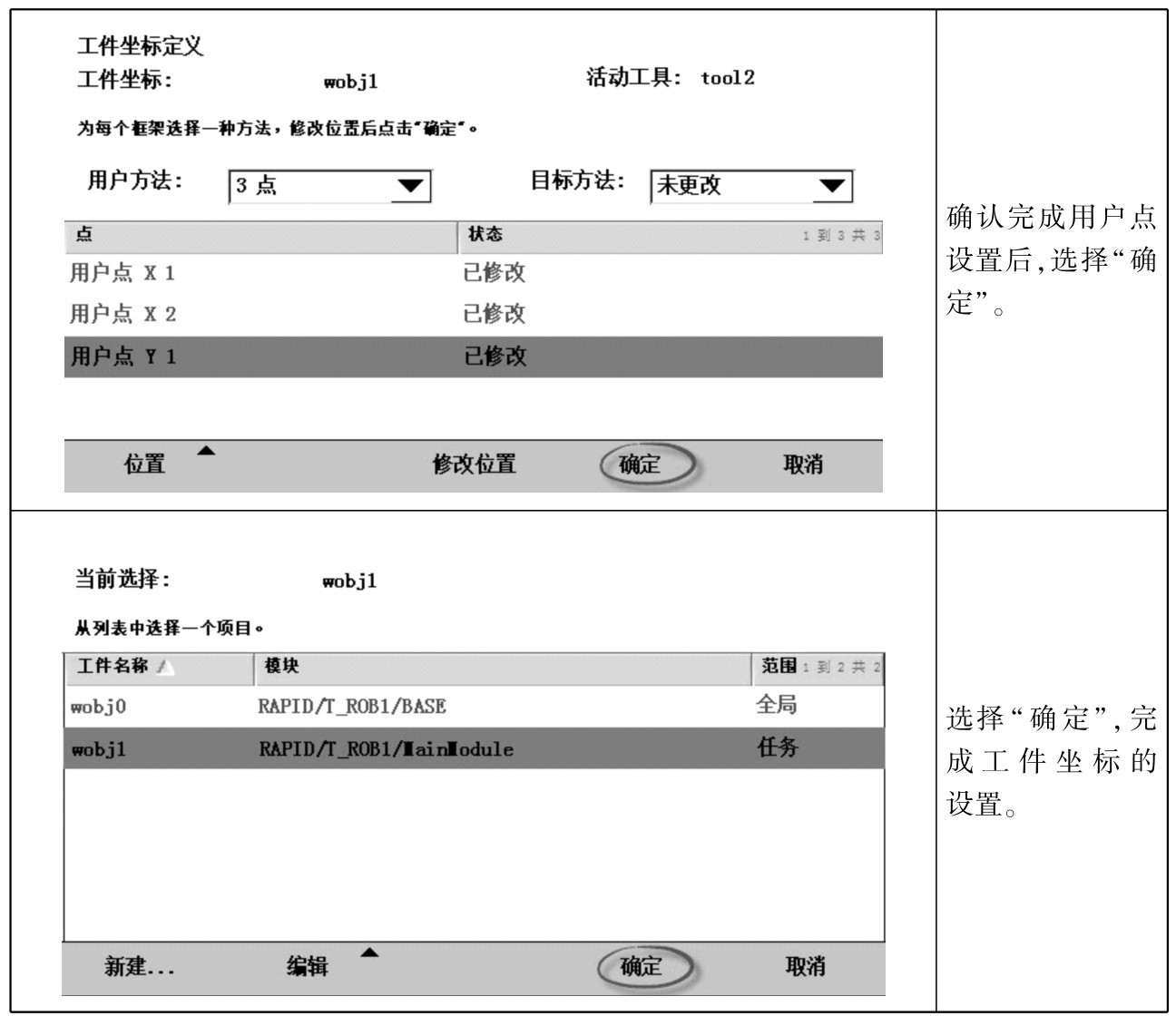
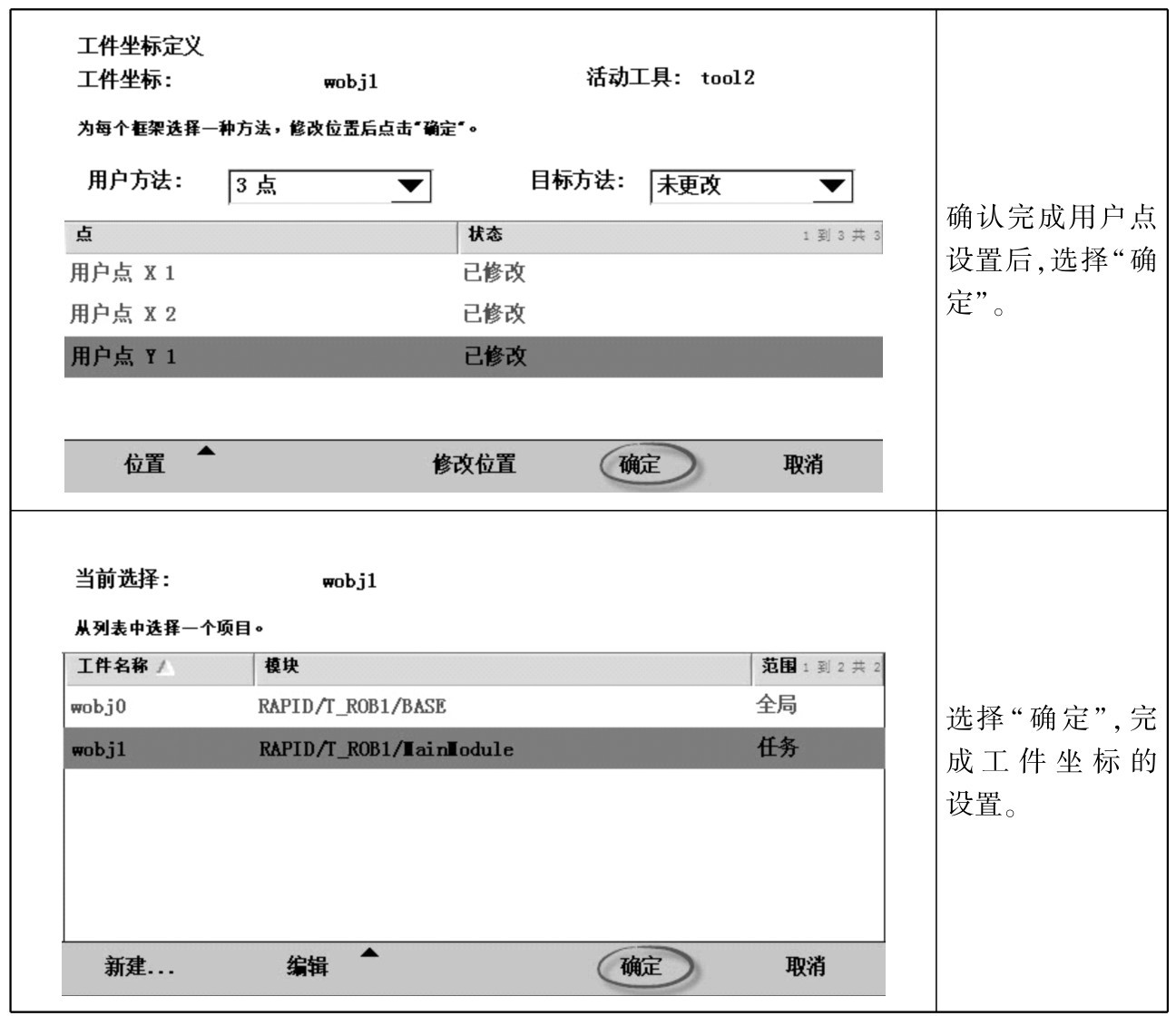
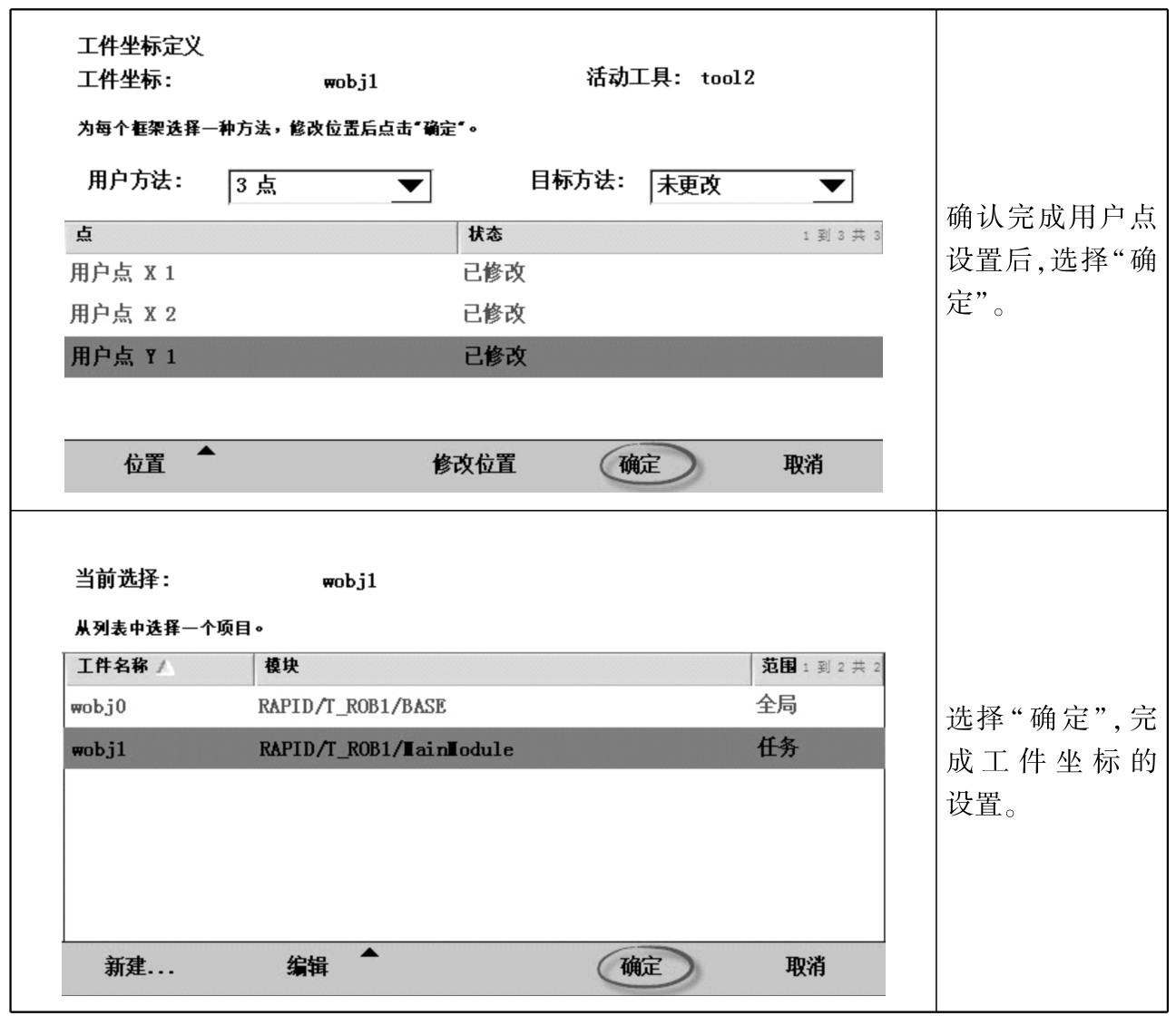
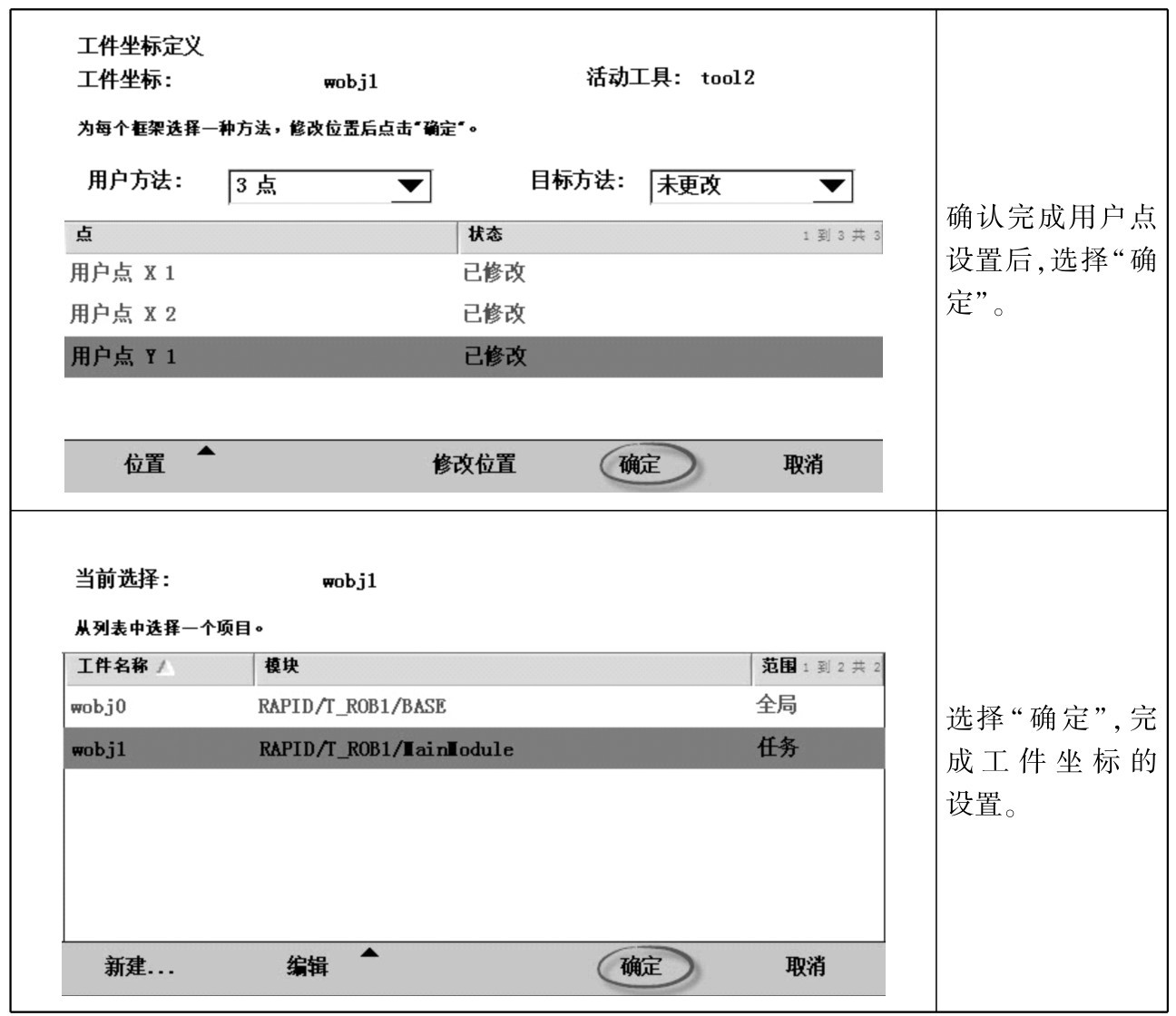
(2)建立工件坐标(抓取位、码垛位)
(3)程序编写
1)建立mian程序和子程序

2)主程序调用
3)P_num相对坐标值

4)Routine1抓取工件
5)Routine1放下工件(码垛)
6)Pile_tally逻辑控制流程程序

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











