



【摘要】:任何一个工件在机床中未定位前,都可看成在空间直角坐标系中的自由物体,即具有六个自由度。所以要完全确定工件的正确位置,必须有六个支承点来限制工件的六个自由度,称此为六点定位原则。由于工件加工要求不同,支承点可以少于六点,即不完全定位。这样在两个自由度方向的定位点重复了。这种情况称为超定位。
10.2.1 工件的定位
加工零件时,将工件安放在机床上,使其相对于刀具有一正确位置,称为定位(location)。
任何一个工件在机床中未定位前,都可看成在空间直角坐标系中的自由物体,即具有六个自由度。即对x、y、z坐标轴的三个转动 、
、 、
、 及三个移动
及三个移动

 ,如图10-2所示,要使工件在空间占有确定的位置,即定位,就必须约束这个六个自由度。所以要完全确定工件的正确位置,必须有六个支承点来限制工件的六个自由度,称此为六点定位原则。在图10-2中,六个支承点分布在三个互相垂直的平面内。其中,支承点1、2、3、在xOy平面内,限制了
,如图10-2所示,要使工件在空间占有确定的位置,即定位,就必须约束这个六个自由度。所以要完全确定工件的正确位置,必须有六个支承点来限制工件的六个自由度,称此为六点定位原则。在图10-2中,六个支承点分布在三个互相垂直的平面内。其中,支承点1、2、3、在xOy平面内,限制了 、
、 和
和 的三个自由度。支承点4、5在yOz平面内,限制了
的三个自由度。支承点4、5在yOz平面内,限制了 、
、 二个自由度,支承点6在xOz平面内,限制了
二个自由度,支承点6在xOz平面内,限制了 自由度。
自由度。

图10-2 六点定位简图
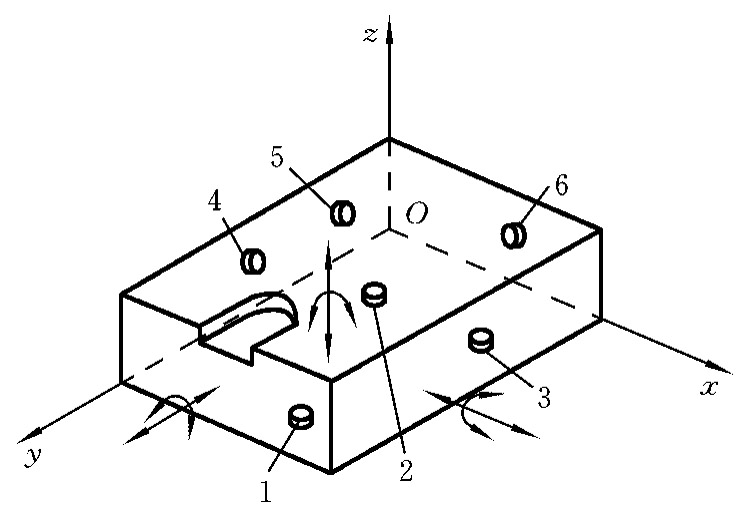
图10-3 完全定位
根据六点定位原则,就可在铣床上准确地加工出短槽(见图10-3),它属于一种完全定位法。
由于工件加工要求不同,支承点可以少于六点,即不完全定位。如图10-4a所示铣窄槽只需限制五个自由度,沿x向的移动自由度不必限制,所以为五点定位。图10-4b所示为铣平面, 和
和 两个自由度不需限制,故为四点定位。又如图10-5所示,车削光轴外圆时,用三爪卡盘卡住光轴,若用前后顶尖顶住两端,则前者限制了
两个自由度不需限制,故为四点定位。又如图10-5所示,车削光轴外圆时,用三爪卡盘卡住光轴,若用前后顶尖顶住两端,则前者限制了
 两个自由度,后者限制了
两个自由度,后者限制了

 、
、
 、
、 五个自由度。这样在
五个自由度。这样在
 两个自由度方向的定位点重复了。这种情况称为超定位(或过定位)。
两个自由度方向的定位点重复了。这种情况称为超定位(或过定位)。

图10-4 不同定位要求实例
a)铣窄槽 b)铣平面
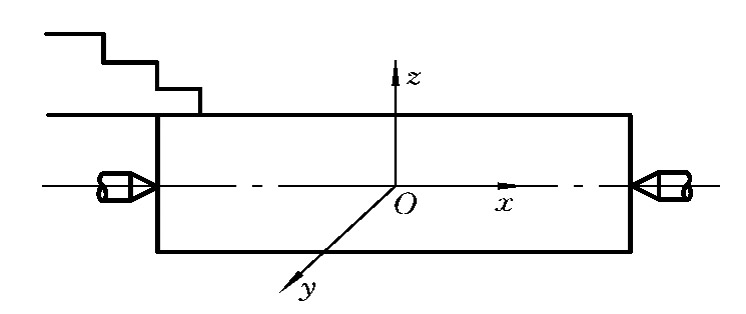
图10-5 过定位
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











