



4.6.2 平面精度评价
Casella等(2000)基于二类高程误差的产生机制,借助于平面斜坡面研究机载激光雷达测量数据的平面位置精度。这里提出一种利用垂直墙面上的激光脚点独特的几何分布特性评价机载激光雷达测量的平面位置精度的方法。如图4-16所示,垂直墙面上的激光脚点应该共面,为了只评价平面位置的精度,将垂直墙面上所有的激光脚点投影到xy平面,对于理想情况,这些投影点在xy平面上应该形成一条直线,但由于有误差,它们并不完全共线(见图4-17)。这里我们共选取了墙面上的178个点的坐标来评价其精度。首先进行直线拟合,可获得拟合残差系列(见图4-18),根据所得的残差可求出均方根误差为±0.131m。

图4-16 激光脚点的三维分布
当然,如果需要评价系统的外部精度,还需要测定房顶的真实高值以及垂直墙面地基处的真实平面位置。一般来说,评定平面位置的精度比评定垂直位置的精度要复杂一些。通常的做法都是借助于真实场景中的一些地物,通过预先测定它们的真实位置作为已知参照 值。但由于机载激光雷达测量的观测不能完全按照要求在地物关键点上采样。也就是说,给定一个激光脚点很难同真实场景中的地物点匹配起来,为此,通常是选取规则房屋的房角或屋脊、输电线等点状或线状地物来进行。为了尽量在扫描过程中能采集到这些点状或线状地物的特征点,在作业过程中要保证足够的数据密度,如10个/m2的数据采样密度。机载激光雷达的激光脉冲频率和扫描频率越高,飞行速度越慢,所获得的激光脚点的密度就越大。
从上面的计算分析可以看出,高程内符合精度约为平面位置精度的2~3倍。一般地,机载激光雷达对地定位平面位置的精度要比垂直方向的精度要低。这与4.3节的理论分析结论一致。
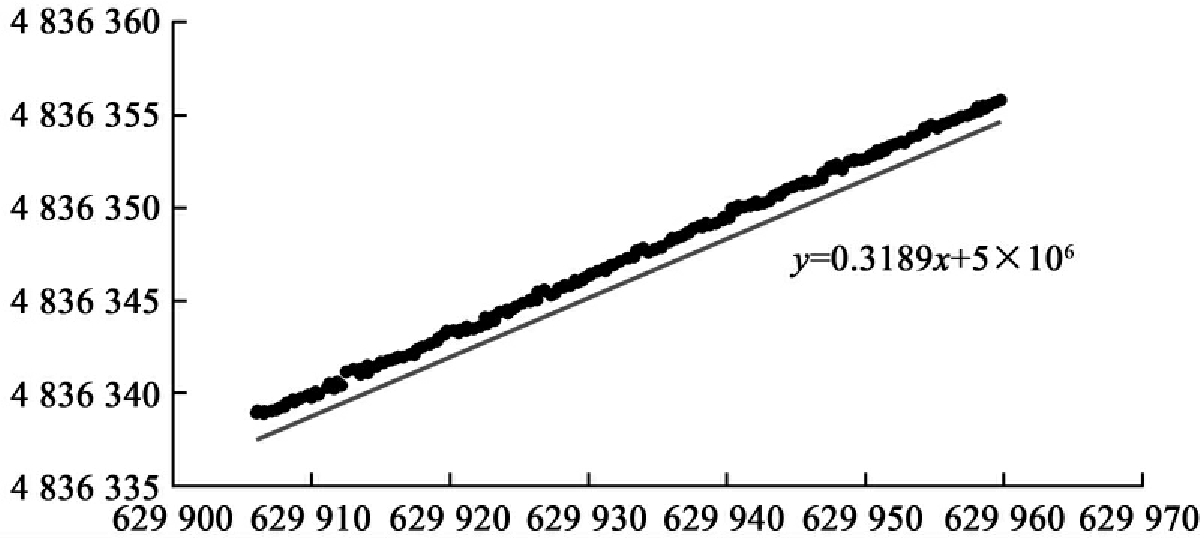
图4-17 垂直墙面上的激光脚点在水平面上的投影轨迹
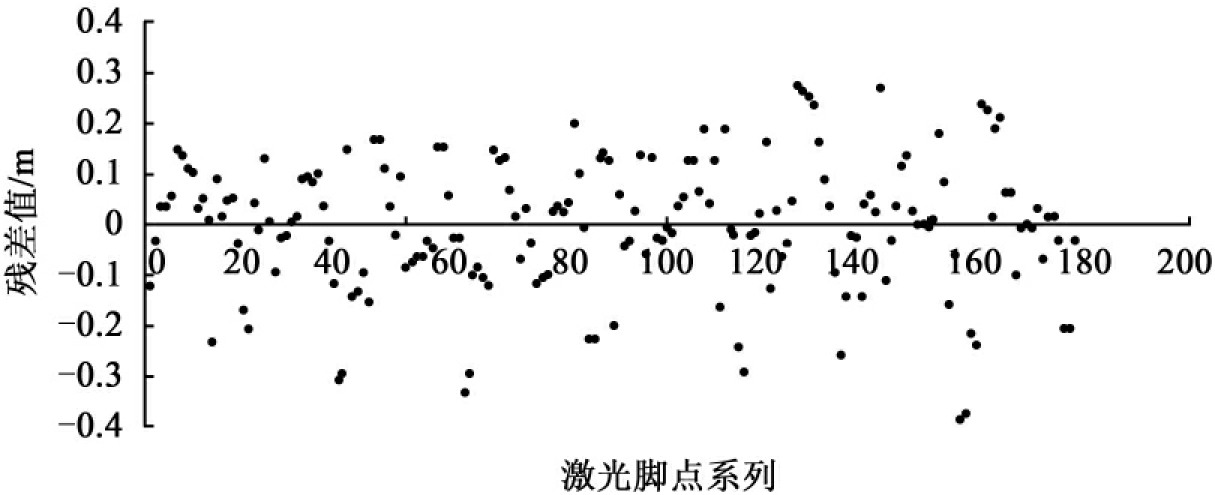
图4-18 垂直墙面上的激光脚点在水平面上投影后的直线拟合残差系列
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











