



我们可以把图5-2所示的传感器,等效为一个集中参数“m-k-c”的二阶系统,如图5-3所示。其中:质量块m为对应于图5-2(a)中的线圈组件和(b)中的永久磁铁,k为弹簧弹性系数,阻尼c大多是由金属线圈骨架相对磁场运动产生的电磁阻尼提供的,有的传感器专设有空气阻尼器。测量物体振动时,传感器壳体与振动体刚性固连,随被测体一起振动。当质量块m较大,弹簧弹性系数k较小,被测体振动频率足够高时,可以认为质量块的惯性很大,来不及跟随壳体一起振动,以至接近于静止不动,这时振动能量几乎全被弹簧吸收,弹簧的变形量接近等于被测体的振幅。符合这种情况的称之谓惯性式传感器。
现在我们通过图5-3所示的二阶系统,来分析磁电式传感器的动态特性。
x0和xm分别为振动物体和质量块的绝对位移,则质量块与振动体之间的相对位移xt为
xt=xm-x0 (5-5)
由牛顿第二定律可得到质量块的运动方程为

由上式可求出相对于输入x0的输出xm。通过式(5-5),即可转换成振动体相对于质量块之输出xt的传递函数

当振动体作简谐振动时,即当输入信号x0为正弦波时,其频率传递函数为

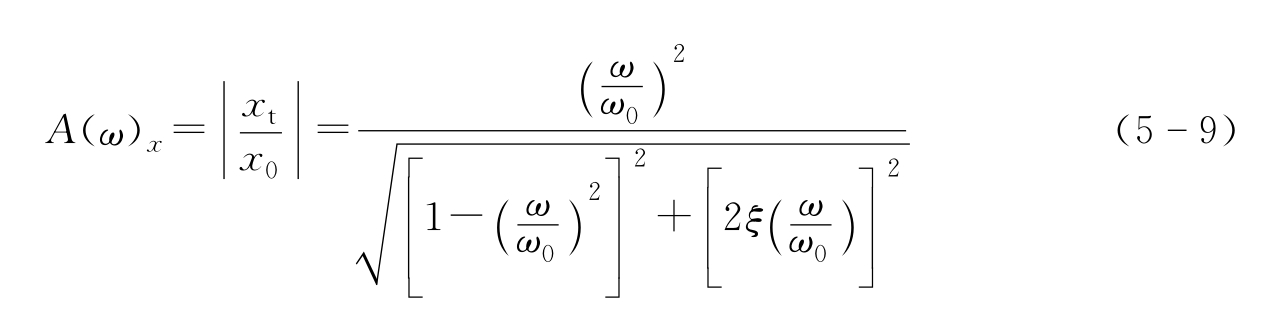
所以,幅频特性为
相频特性为

上式中 为固有频率
为固有频率 为阻尼比。
为阻尼比。
由式(5-9)可绘成如图5-4所示的频响特性。

图5-4 磁电式传感器的频响特性
(a)幅频特性;(b)相频特性
有时,为了更深入地研究传感器的动态特性,也可以用网络分析法导出传感器的传递函数[3]

式中:Bδ为气隙磁感应强度;Ze为传感器电阻抗(线圈阻抗);ZL为负载阻抗。
当传感器为电压输出时,负载阻抗ZL远大于线圈阻抗Ze,并呈电阻性,于是式(5-11)简化成

由图5-4可见,当ω》ω0即振动体的频率比传感器的固有频率高得多时,则振幅比接近于1;表明质量块与振动体之间的相对位移xt就接近等于振动体的绝对位移x0,此时,传感器的质量块即相当于一个静止的基准。磁电式传感器就是基于上述原理测量振动的。
对于图5-2(a)所示传感器,永久磁铁与传感器壳体固定在一起,而线圈组件通过弹性系数k很小的弹簧与外壳相连,因而,当振动的频率远远高于传感器的固有频率时,线圈组件就接近静止不动,而永久磁铁跟随振动体振动。这样线圈组件与永久磁铁之间的相对位移或速度就十分接近振动体的绝对位移或振动速度。
对于结构已经确定的传感器,相关结构参数都可看作常数,因此由式(5-12),可以作出传感器的输出特性如图5-5所示。图中虚线为理想直线,实际输出特性存在局部的非线性。
由式(5-12)和图5-4可见:

图5-5 磁电式传感器的输出特性
(1)当被测体的振动频率ω低于传感器的固有频率ω0,即(ω/ω0)<1时,传感器的灵敏度随频率而明显地变化。在图5-5中,对应为起始段vA~vB。
(2)当被测体振动频率远高于传感器的固有频率时,一般取(ω/ω0)>3,灵敏度接近为一常数,它基本上不随频率变化。在这一频率范围内(图5-5中的vB~vC段),传感器的输出电压与振动速度成正比。这一频段即传感器的工作频段,或称作频响范围。这时传感器可看作一个理想的速度传感器。
(3)当频率更高时,由于线圈阻抗的增加,灵敏度也随着频率的增加而下降。
必须指出,以上结论是对惯性式磁电传感器而言的。一般固有频率ω0=10Hz,较好的低频传感器可做到ω0=4.5Hz,上限频率为200Hz~1kHz。对于动圈与测杆相固连的直接式磁电传感器,其上限工作频率取决于传感器的弹簧弹性系数k。一般说来,直接式传感器的频响范围可从零到几百赫兹,高至10千赫兹。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










