



第三节 复杂组织失效的结构微调控制理论及方法
目前,研究者对组织失效的界定还不是十分明确。如果把组织失效理解为组织有效的对立面,则组织失效就可以简单而明确地定义为组织目标没有实现,这种解释恰好与巴纳德定义的组织有效性相对应。前文我们已经对组织失效进行了较为详细地论述,这里我们不再赘述。由于组织行为与结构具有密切的相关关系,[1]所以为通过结构微调实现对组织失效的调控提供了理论依据。这里我们必须重复的非常重要的一点是,复杂组织具有结构敏感性,这使我们可以通过对组织结构的微调,并利用复杂组织演化过程中存在的累积和叠加效应,逐步放大结构微调产生的作用,最终影响到组织的宏观行为,达到对组织失效有效控制的目的。当然在有些情况下,也可能出现通过对组织结构大刀阔斧的改变。这种情况通常会出现在组织处于崩溃的边缘,需要对组织结构进行革命性的重构来应对组织行为的极端变化。这种情况通常是周期性的,例如企业濒临倒闭、社会转型等。而在多数情况下,宏观组织结构是稳定的,出现变化元素或交换作用则存在于组织微观层面,它们构成了结构微调手段的元素。
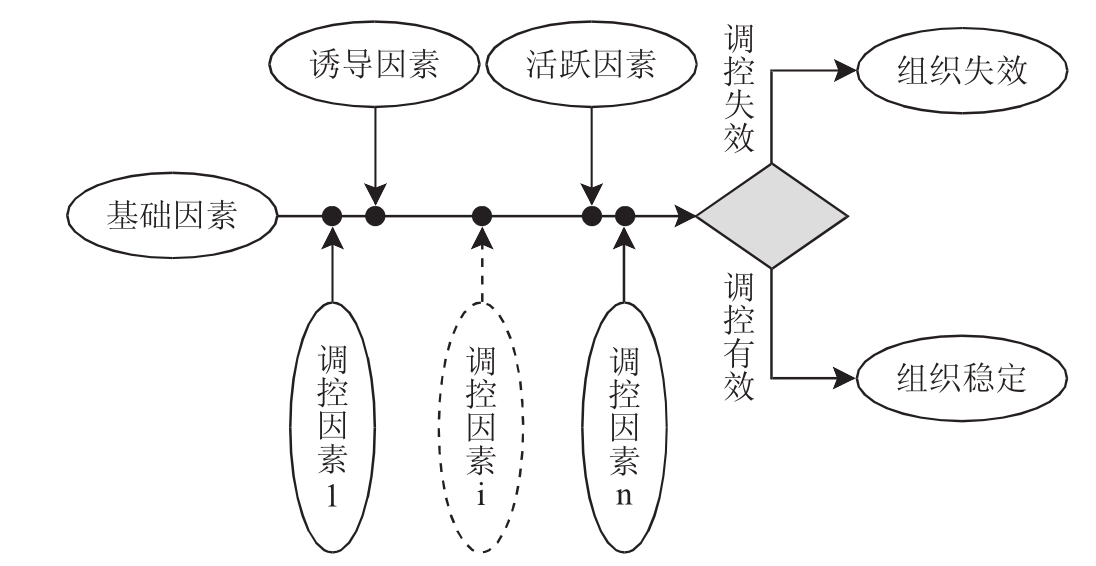
图7-4 复杂系统失效控制的一般过程
一、结构微调的理论基础
上一章中的敏感性阀门函数和敏感度的界定,为我们从微观层面上改变组织的敏感度提供了理论支持,从而也构成了结构微调的理论基础。即通过改变组织的微观结构,使组织结构某些区域的敏感性出现变化,并通过扩散机制使组织整体结构敏感性也得到改变。这些敏感性区域经过一定时间的累积和叠加,逐步导致组织结构维度的微变,以达到对组织宏观行为的影响。因此,结构微调理论从本质上要建立结构维度与组织宏观行为之间的联系。事实上,单纯的敏感性元素行为或交互作用的激活未必能够形成系统结构敏感性作用。因此,还必须测度这些敏感性关系和交互作用有没有导致系统结构维度的变化。系统结构维度的变化将从根本上导致系统宏观行为的变化,而且这种变化是不可逆转和还原的。例如,一维表现为线,二维表现为面,三维表现为空间。其不仅外在表现差别巨大,而且本质内容、特征都有巨大差异。例如,长度、面积和体积的比例性质是众所周知的,当比例放大λ倍时,曲线的长度放大λ倍,平面区域的面积放大λ2倍,三维物体的体积放大λ3倍。可见,结构维度与系统行为有着必然的联系。[2]即系统结构维度变化,进一步通过系统结构敏感性作用,导致了系统宏观行为变化。因此,结构敏感性调控恰如杠杆作用,一些隐性的、不易察觉的扰动可以通过系统的结构敏感性作用放大出来,因而可以很好地解决复杂组织系统失效的调控难题。目前,在管理实践中,人们通常把系统的维度假定为整数维,通过有限个参数和变量构成的模型来模拟系统的行为,很显然会导致大量的信息流失。因此,我们必须运用有效的度量系统结构维度的工具,以便能够实现对系统行为的准确调控。下面我们将讨论测定结构敏感性作用空间维度的方法。
设U为系统结构敏感性作用空间SAS(对于现实的系统,该空间很显然是有限维的,令为n维)的任何非空子集,U的直径定义为
![]()
即U内任何两点距离的最大值。如果{U}i为可数个(或有限个)直径不超过δ的集构成的覆盖F的集类,即 ,且对每一个i都有0<|Ui|≤δ,则称|Ui|为F的一个δ覆盖。
,且对每一个i都有0<|Ui|≤δ,则称|Ui|为F的一个δ覆盖。
设F为空间SAS中的任意子集,s为一个非负数,对任何δ>0,定义
![]()
于是考察所有直径不超过δ的F的覆盖,并试图使这些直径的s次幂的和达到最小。当δ减少时,式(7-14)中能覆盖F的集类是减少的,所以下确界
 随着增加,且当δ→0时,趋于一个极限。记
随着增加,且当δ→0时,趋于一个极限。记
![]()
对空间SAS中的任何子集F这个极限都存在,但极限值可以是0或∞。
对于式(7-14),容易看出对任何给定的集F和δ<1,Hnδ(F)对s是不增的。因此根据式(7-15),Hs(F)也是不增的。事实上,有更进一步的结论:若t>s,且{Ui}为F的δ覆盖,我们有
![]()
取下确界得 ,令δ→0。可见对于t>s,若Hs(F)<0,则H(tF)= 0。所以存在s的一个临界点,使H(sF)从∞跳跃到0。这个临界值就称为基于豪斯道夫—贝西康维奇维的结构敏感性作用空间维度。
,令δ→0。可见对于t>s,若Hs(F)<0,则H(tF)= 0。所以存在s的一个临界点,使H(sF)从∞跳跃到0。这个临界值就称为基于豪斯道夫—贝西康维奇维的结构敏感性作用空间维度。
在实际应用中,我们通常用计盒维数或盒维数。这种维数的数学计算及经验估计相对容易一些。设F是系统结构敏感性作用空间SAS上任意非空的有界子集,Nδ(F)是直径最大的δ可以覆盖F的集的最少个数,则F的下、上计盒维数分别定义为

如果这两个值相等,则称共同的值为F的计盒维数或盒维数,即为
![]()
通过敏感性阀门函数、结构敏感性作用空间、结构敏感性作用空间维数及敏感性元素或敏感性交互作用的活动方程,我们可以对复杂组织系统的运行机制和失效机制进行量化处理,定量地模拟复杂组织系统行为的演化机制及系统结构敏感性的传递机制,对各种复杂系统问题进行分析和解释,为复杂组织系统的管理和调控提供理论与方法支持。
20世纪80年代,波特(Porter)的“五力模型”风靡业界的时候,Wernerfelt(1984)等人就曾批评这种外部分析方法存在致命缺陷,即怎样解释处于同一行业,定位相同的企业之间在业绩上的极大差异。事实上,当我们把结构敏感性引入企业(复杂组织)业绩的分析时,这类问题就迎刃而解了。尽管企业内部组织结构相似,组织占有的资源、人员知识水平等都基本上处于同一个层次,但由于组织结构敏感性的存在,使组织内外部变化通过结构敏感性的合成作用却会导致非常显著的差异。
Chris Argyris在其名著《组织学习》中写道:“每一个管理职能学科都是一种关于如何行动的因果理论。”可见现代管理研究的发展受到自然科学所因循的“还原论范式”影响之深。而在对复杂组织系统的管理研究中,研究者发现因果律并不严格服从,席酉民教授把因果律失效称作管理复杂性,也是当前管理学界对管理复杂性最简洁和直观的描述。尽管至今人们对复杂组织系统行为产生的机制和演化机制还不甚清楚,但对其失效的调控仍然是从分析和综合两个层面展开的,这也决定了未来管理之路。沿着“分析和分解”这条路径出发则演绎为多维管理,而沿着“综合”这条路径出发则演绎为整体性管理。
二、结构微调控制方法设计
结构微调控制方法设计思路是基于组织结构与组织行为直接相关的前提,并利用组织结构敏感性所形成的累积和叠加效应,实现对组织行为的调控。众所周知,在数学和物理研究领域,维度变化导致了点(如果是组织,则指其构成要素,组织结构维度越大,则组织要素的自由度越大)在空间属性的巨大差异。这主要表现在维数越大,要素变化的方向越多,空间中点的自由度越大。由此,Richard Bellman提出“维度之咒”,用来描述当(数学)空间维度增加时,体积指数增加的难题。例如,“100个平均分布的点能把一个单位区间以每个点距离不超过0.01采样。而当维度增加到10后,如果以相邻点距离不超过0.01小方格采样一单位超正方体,则需要1020个采样点。所以,这个10维的超正方体也可以说是比单位区间大1018倍”。
维度又称维数,是数学中独立参数的数目。在物理学和哲学的领域内,指独立的时空坐标的数目。0维是一点,没有长度。1维是线,只有长度。2维是一个平面,是由长度和宽度(或曲线)形成的面积。3维是2维加上高度形成体积面。维数不同的空间,其性质差异非常大,它决定了空间中的点运动方向或者说是自由度(见图7-5)。例如,我们熟悉的三维空间有3个维(上下、前后、左右),则该空间中的点可以往上下、东南西北移动,其他方向的移动则可以用3个基本方向的合成来表示。例如,向下移就等于负方向地向上移,向西北移就只是向西和向北移两个方向的合成。另外,爱因斯坦提出时空坐标系,时间是第四维,与其他3个空间维不同的是,它只有一个方向(无负方向),[3]且只能向一个方向前进(如图7-6所示)。可以看到,不同维数的空间,其性质差异很大。处于不同空间中的点,其自由度(运动方向)也比较大,这决定了不同维数的组织,其控制手段和管理模式也必将有很大差别。其实,管理理论的演变从某种意义上来说是建立在组织结构认知不断变化的基础上的。例如,整个20世纪的大部分时间里,职能管理都是将组织结构假定为层次的金字塔结构,所以管理的职能也就围绕着这种金字塔式的组织结构进行分配。但在世纪之交,网络技术开始普及应用,逐渐改变了高科技时代的交流和工作模式。一些新的组织结构,例如复杂网络结构等开始出现。在这种组织结构形式下,新的管理模式开始出现,职能分工不再以等级为基础,而是建立在网络增长、偏好依附及竞争性适应等基础上,新的组织结构与传统的组织结构相比出现了根本性变化。
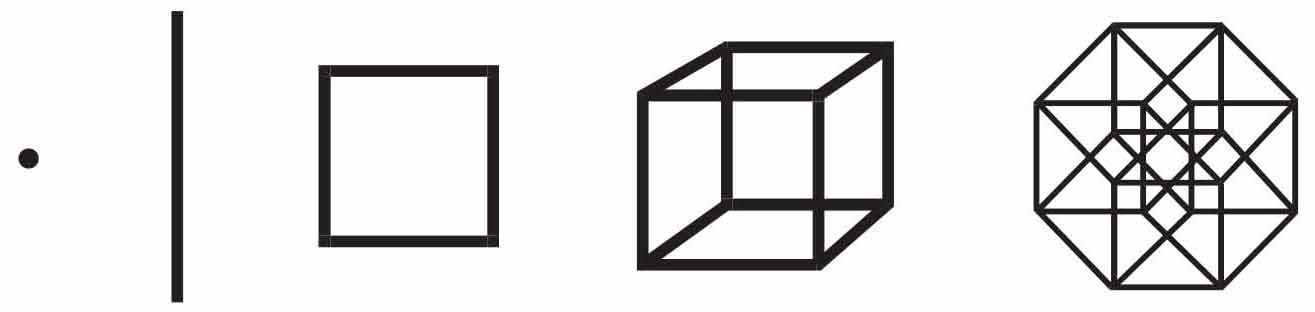
图7-5 空间的表示
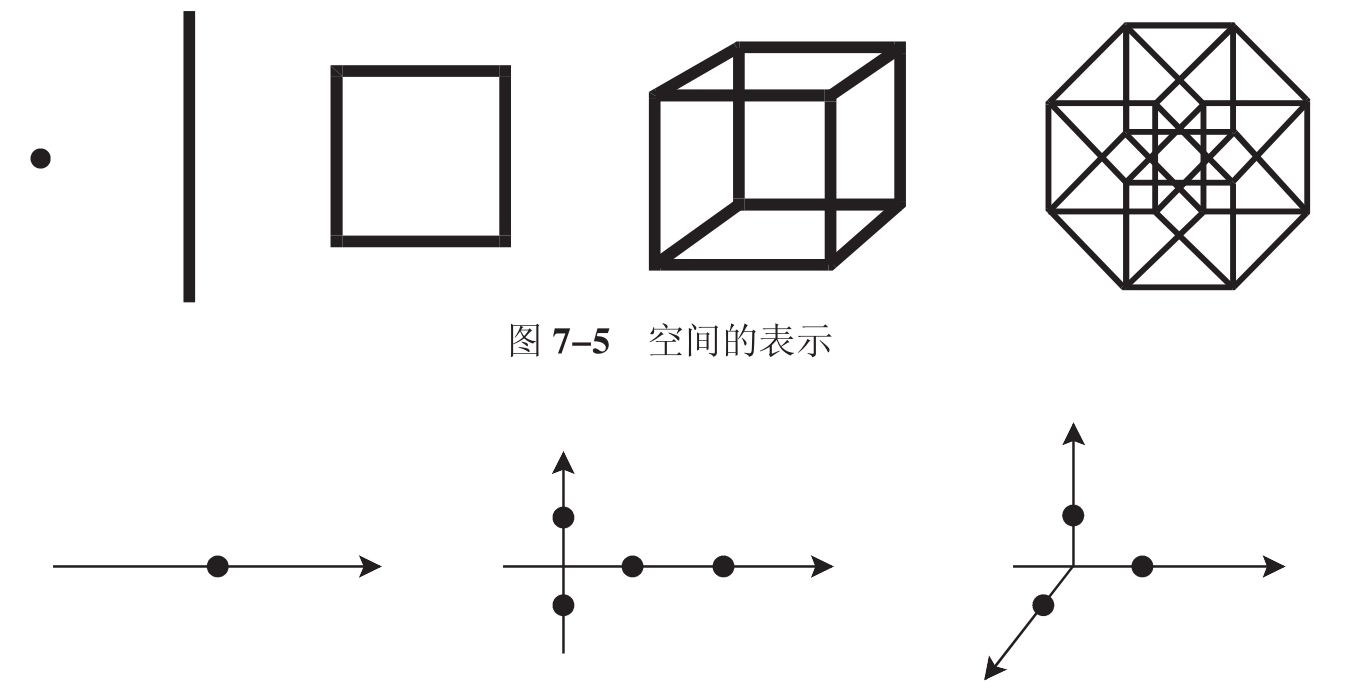
图7-6 空间中的点的运动方向
目前,组织行为学研究领域很少见到研究组织行为与组织结构维数之间交互作用的研究成果,但有关组织结构与组织行为间关系的研究文献则非常常见,最为著名的是Forrester等人在系统动力学方面的研究成果。他们基于组织行为源于组织微观结构的思想,通过系统建模的形式给出系统的抽象模型,并以所建立的模型为基础模拟由系统微观结构生成系统行为的动态演化过程。但由于组织微观结构和组织宏观行为间的弱因果联系,加之由组织微观结构到组织宏观行为的时空因果路径较长,因此,试图对复杂组织行为进行精确控制在理论上是不可行的,最多只能达到相对精确的控制。鉴于此,我们设计复杂组织行为控制方法时主要考虑两条路径,分别为组织行为跃迁和组织结构维度跃迁。
1.路径一:行为跃迁
选取适当的敏感性区域,触发其中的敏感性元素或交互作用突破临界点,利用复杂组织内部存在的结构敏感性作用,以及叠加效应(横向叠加,即在某一时刻,横向上的组织构成基本要素间的行为叠加)和累积效应(纵向叠加,即在纵向上,随着时间的推移,这些叠加后的要素行为又进一步叠加所形成的效应),使组织行为突破某个临界值,推进到控制者期望的结果。
在前文中,我们用向量wi=(w1,w2,…,w)I(i= 1,2,…,I)表示所有成员的行为的合成向量,其中个体行为 表示某个基本要素的行为,k为要素的偏执系数,wm表示的是与元素i相邻元素m的行为,ρl表示的是与元素i相邻元素l的交互作用的强度。之所以这样进行界定,主要依据于如下两点经验判断:第一,个体i行为的波动程度首先取决于个体的偏执程度。对于固执的个体,其行为受到其他个体行为变化的影响越小,个体行为会通过它们之间的交互作用的牵引而同步或共振。第二,如果个体i的偏执程度给定,则对个体i行为能够产生显著影响的通常是与该个体相邻的且具有较强交互作用的个体,而且交互作用越强相邻个体对个体i产生的影响越显著。例如我们的行为通常受到亲人、关系密切的邻居和同事的影响比较大,就是这个道理。而且这些判断可以通过大量的统计数据进行验证。
表示某个基本要素的行为,k为要素的偏执系数,wm表示的是与元素i相邻元素m的行为,ρl表示的是与元素i相邻元素l的交互作用的强度。之所以这样进行界定,主要依据于如下两点经验判断:第一,个体i行为的波动程度首先取决于个体的偏执程度。对于固执的个体,其行为受到其他个体行为变化的影响越小,个体行为会通过它们之间的交互作用的牵引而同步或共振。第二,如果个体i的偏执程度给定,则对个体i行为能够产生显著影响的通常是与该个体相邻的且具有较强交互作用的个体,而且交互作用越强相邻个体对个体i产生的影响越显著。例如我们的行为通常受到亲人、关系密切的邻居和同事的影响比较大,就是这个道理。而且这些判断可以通过大量的统计数据进行验证。
我们可以定义如下泛函来表示某一时刻合成后的组织行为,即组织的叠加效应
![]()
另外,我们还定义如下泛函来组织行为的纵向叠加,即组织内存在的累积效应,如下所示:
![]()
注意:这里的“⊗”表示组织基本构成要素间的叠加作用或者组织行为在纵向时间分布上的累积作用。由于这种叠加作用或累积作用非常复杂,所以我们只能用抽象符号来替代,在具体应用中可以选取合适的叠加函数或者累积函数来表示。对于前者,它表示的是元素行为通过它们之间的交互作用进行叠加后形成的合成作用。对于后者,它表示的是组织行为的演化,即累积效应。这种叠加作用和合成作用具有随机性和不稳定性,通常难以用确定的关系来表达,在实际应用中需要进行简化。
为了实现组织的行为跃迁,首先,我们可以通过组织结构微调控制的方式,对敏感区域中的要素或者交换作用进行触发,从而试探性地识别敏感性元素行为传递的时空因果路径,并建立这些路径的数据库,从而为通过微观要素行为变化控制组织行为提供理论依据。其次,通过敏感性元素行为的叠加作用对组织结构中的敏感性区域进行激发,试探性地识别组织中的敏感性区域传导的时空因果路径,这为通过组织中存在的叠加效应和累积效应控制组织行为提供了理论依据。
2.路径二:维度跃迁
通常组织结构的变化并不一定导致组织结构维度的变化。但是,如果组织构成的基本要素行为运行的基本方向数量(反映组织基本要素约束程度的自由度)出现变化时,按照维度的定义,这时候组织结构的维度就会增减。如果个体元素沿着一条直线分布,则系统的结构为一维。当这些元素的行为只沿着同一个方向垂直波动时,系统的结构由一维向二维跃迁。当这些元素的行为沿着多个方向垂直波动时,系统的结构由二维向三维或多维跃迁。因此,组织行为调控的第二条路径主要是通过增减组织构成的基本要素的自由度来完成的。从理论上说,组织结构及组织行为状态空间应该是多维的,并且在某些情况下还可能是分数维的。因此,复杂组织的基本构成要素的行为产生机制、传导机制也就比较复杂,这也导致了这些基本要素行为在时间和空间上的叠加和累积效应也非常复杂。目前,通过维数来控制组织行为的研究成果还不多见。
基于结构微调的复杂组织行为控制方法的前提假设是组织行为、组织结构、结构维数、基本构成要素行为状态空间的维数之间存在联系,但这种联系具有弱因果性。否则通过结构微调的方式进行组织行为控制必将会完全失效。在实际应用中,我们以组织基本构成要素传递时空路径的识别为基础,建立组织结构信息数据库,并根据复杂组织的结构敏感性设计结构微调控制器,通过对基本构成要素及其间的交互作用存在的敏感性的激发、传递、叠加及累积得到通过结构微调实现对复杂组织宏观行为控制的目的。因此,由于真实的组织结构应该是网络化的(层次结构是网络结构的简单形式),它使利用经典科学的追根求源方法(还原论方法),通过对源头的调控来对组织行为的控制在实际应用中难以奏效。对于复杂组织,无论采用路径一还是路径二,组织行为控制必须充分考虑组织整体结构、组织结构敏感性,以及由此引起的组织行为在时间和空间上的累积与叠加效应。而组织微观结构和组织宏观行为之间一般表现出弱因果性,我们只能通过组织结构敏感性对这种弱因果性进行放大,从而识别组织的基本构成要素行为变化或者组织微观结构的变化与组织宏观结构之间的弱因果性,这为复杂组织行为控制有效性提供了理论上的支持。
三、结构微调控制过程模型
1.基本要素的行为及其叠加
对复杂组织行为有效控制的前提是弄清楚复杂组织行为的产生机制。由于复杂组织存在不可逆性,所以每个复杂组织都是唯一的,并且是无法复制的。组织所处的环境、组织内部结构关系、组织构成的基础要素都随着时间在演变,我们无法对一个组织进行重复性的实验。值得注意的是,这里我们假定个体的行为相对于时间和空间来说是二阶连续且可微的。尽管会有学者说个体行为可以连续(甚至是离散的)但未必是可微的,但为了分析问题的方便,我们首先只做一般性的假定。另外,我们还假定个体行为变化具有周期性,在某一个周期[0,T]中,存在某个点 。
。
在 ,个体行为变化越来越大
,个体行为变化越来越大

在[Θ,T],个体行为变化逐渐衰减,恢复到正常水平

其中, ,i= 1,2,…,n称为关联行为强度函数,对于组织整体行为或者宏观行为变化来说
,i= 1,2,…,n称为关联行为强度函数,对于组织整体行为或者宏观行为变化来说

个体行为间的叠加效应强度取决于以下矩阵的性质:

对于某个特定的复杂组织,当受到内部扰动或者外部扰动影响时,通常最先做出反应的是组织内部的基本构成要素。这些基本构成要素的行为通过它们之间的交互作用进行叠加,并逐渐突现复杂组织的宏观行为。随着时间的推移,组织宏观行为进一步在累积效应的作用下,形成可识别的稳定的组织宏观行为,即组织秩序,而组织成员任务的完成、组织目标的实现都是在此特定的组织秩序下完成的。
2.基于结构微调思想的基本要素的行为状态方程
另外,我们必须特别注意的是,组织的基本构成要素基本是同源化的。例如金刚石与石墨都是由碳原子构成的,但这些基本构成要素间的千变万化的交互作用关系,却使复杂组织表现出不同的特征或行为,例如石墨是自然界中最软的物质,而金刚石是最硬的,这主要是这些基本构成要素之间交互作用的差异性所致。因此,控制的重点应该是基本要素间的交互作用,而不应该是基本要素。参照图7-7的反馈回路方框图,我们可以给出图7-8的复杂组织的基本要素的反馈回路方框图,我们将控制算法用结构敏感性来替代。也就是说,在这里控制算法主要是通过对敏感性基本要素、交互作用及其组合的识别、触发来完成的。
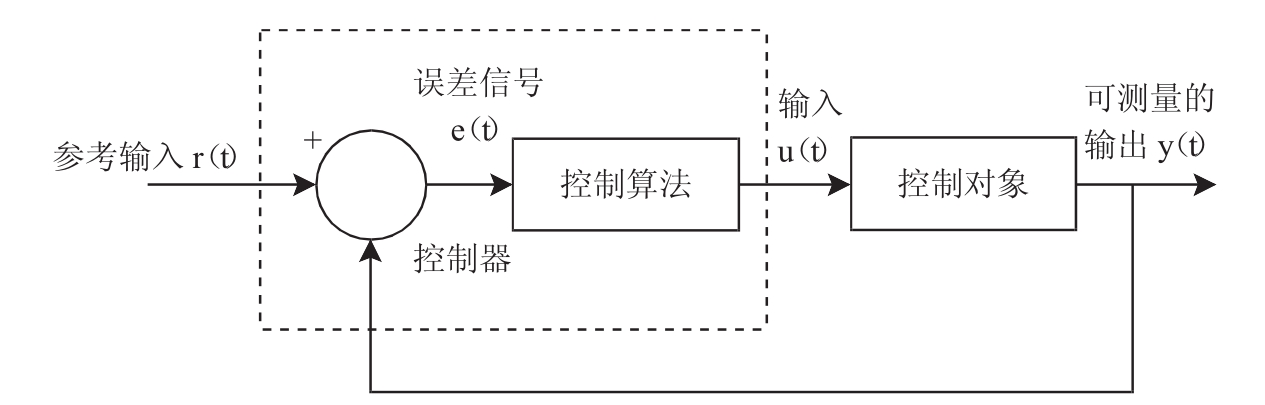
图7-7 反馈回路方框图
对于基本要素,其状态方程一般用
![]()
来表示。x表示所有状态变量的集合(x1,x2,…,xn),它是一个向量,u为基本
构成要素的外部对其作用(与基本要素相关的交互作用)的集合(u1,u2,…,ul)。
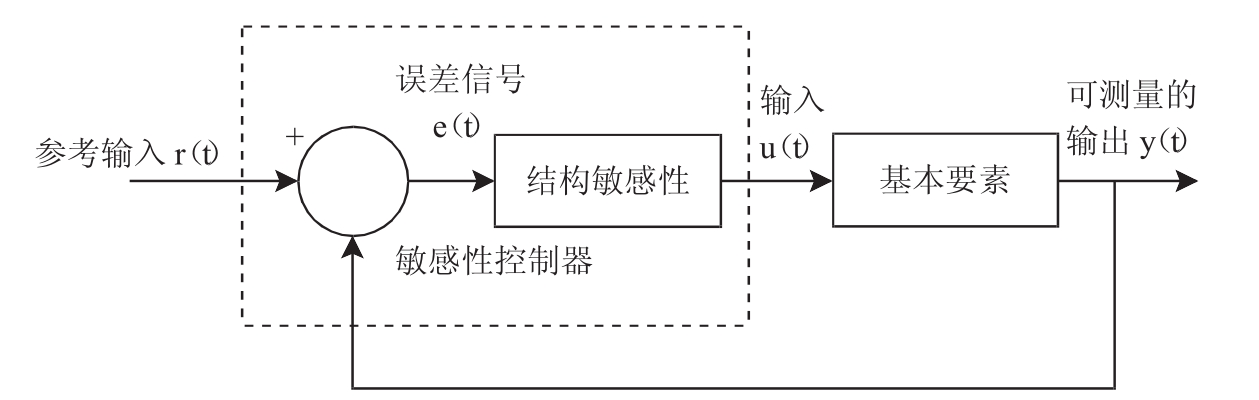
图7-8 基本要素的反馈回路方框图

基本要素的状态变量不一定直接作用于外界而能够被观测,为了实现组织管理者的某种控制意图,有时候也一定要直接观测这些量。对于结构微调控制系统,该系统的输出(被观测量)和状态变量存在下述函数关系:
![]()
这里我们可以将基本要素结构微调控制系统状态方程用如下方程组表示:

3.基于结构微调思想的基本要素的行为状态转移方程
通常,我们可以将式(7-28)写成如下形式:

其中,ε1(t),ε2(t)的复杂程度决定了式(7-28)的复杂程度。这里A(t)称为(n×n)系统矩阵,B(t)称为(n×l)控制矩阵,C(t)称为(m×n)输出矩阵,D(t)称为(m×l)传递矩阵。
对于基本要素的下一个状态,我们可以通过建立状态转移方程来获得。
如果式(7-29)可以得到稳定解,则该系统为简单控制系统,否则称为复杂控制系统。 所以假设
所以假设
x(t)=Φ1(t,t0)x(t0)+Φ2(t,t0)u(t0)+Φ3(t,t0)ε1(t)因此有
![]()
求解式(7-30)即可得出基本要素的下一个状态。
而Φ1(t,t0)、Φ2(t,t0)、Φ3(t,t0)通常用下面的矩阵表示:
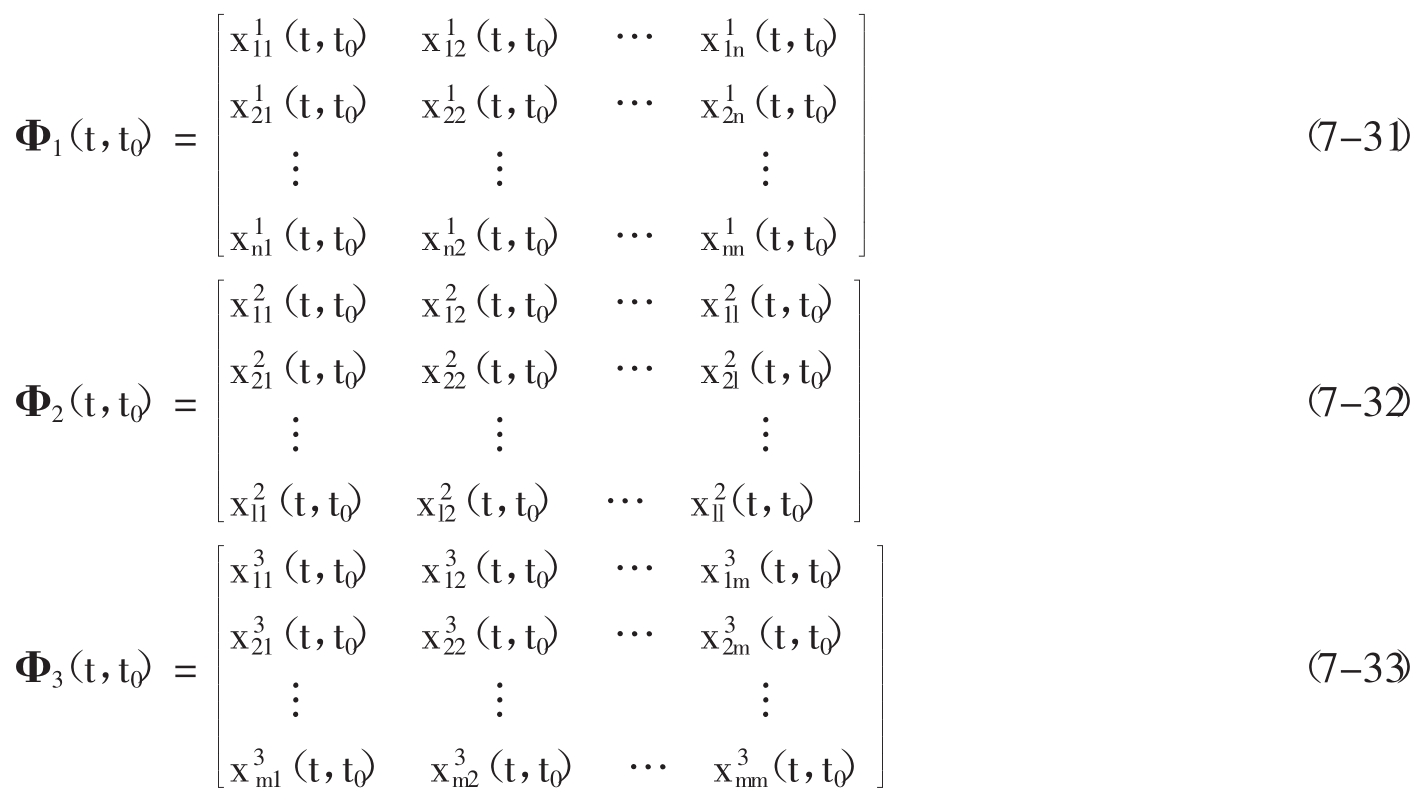
我们称Φ1(t,t0)、Φ2(t,t0)、Φ3(t,t0)为状态转移矩阵。
但是对于复杂系统来说,式(7-30)很难得到一个解析解,甚至得到一个数值解在现有的知识体系下也很困难。这主要由两点原因造成:
(1)基本构成要素行为状态不稳定性、离散性及不易观测性。这使建立基本要素的输入和输出之间的强因果关系则非常困难。
(2)状态转移矩阵的复杂性。由于矩阵中的各个要素也可能在随着时间的变化而变化,通常很难得到一个具体且确定的状态转移矩阵,因此通过上述模型,我们也就无法准确预测基本要素的下一个状态。但是通过结构微调的方式我们并不把控制的重点放在具体的基本要素上,而是放在对敏感性要素和交互作用的激发这个环节,然后通过微调组织结构,观察输出,也就是组织的宏观行为,通过不断地搜索及优选,最终目标是建立起组织结构敏感性与组织行为间的时空因果关系,这样组织管理者就可以通过改变组织的微观结构达到控制组织行为的目标。
从上述的分析我们可以看到,简单系统的结构与行为之间的关系与复杂系统的结构和行为之间的关系存在着本质的区别,这种区别使复杂组织和简单组织的行为控制方式也存在本质区别。对于简单组织,微观结构与宏观行为间存在强因果关系,组织行为则比较容易得到最优控制,控制模式设计也相对简单。但是,对于复杂组织,由于组织内部强因果性与弱因果性的无规律性的交互作用,这导致微观结构与宏观行为间在多数情况下只存在弱因果关系,使组织行为很难得到最优化控制,因而控制模式也就更加复杂。另外,复杂组织的很多基本构成要素是智能体,具有自适应性,本身就是一个反馈系统。因此,复杂组织中在微观层面上存在的大量反馈系统在不断地叠加和传递过程中,进一步增加了复杂组织行为控制的难度及复杂程度。另外,每次叠加和传递作用的叠加函数及传递函数都存在差异,这使复杂组织系统的行为控制也比物理系统的控制要复杂和困难。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











