



【摘要】:在第3.3节中我们假设问题的环境是完全可观察的和确定性的,而且智能体了解每个行动的结果。它的感知在每个行动之后不能提供新的信息。每个可能的感知信息定义了一个必须提前准备处理计划的偶发事件。如果不确定性是因为另一个智能体的行为造成的,那么这个问题称作对抗性的。探索性问题可以被视为偶发性问题的一种极端情况。本节剩下的部分将讨论此问题的无传感和偶发情况。
3.6 使用不完全信息的搜索
在第3.3节中我们假设问题的环境是完全可观察的和确定性的,而且智能体了解每个行动的结果。因此,智能体可以准确地计算出经过任何行动序列之后能达到什么状态并且总是知道自己处于什么状态。它的感知在每个行动之后不能提供新的信息。当状态或者行动的知识不完全的时候会发生什么呢?我们发现不同的不完全性能够导致三个不同类型的问题:
1.无传感问题(也称为构造问题):如果一个智能体根本没有传感器,那么(据它所知)它将会处于几个可能的初始状态之一,而每个行动也许因此会导致几个可能的后继状态之一。
2.偶发性问题:如果环境是部分可观察的或者行动是不确定的,那么智能体的感知在每个行动之后将提供新的信息。每个可能的感知信息定义了一个必须提前准备处理计划的偶发事件。如果不确定性是因为另一个智能体的行为造成的,那么这个问题称作对抗性的。
3.探索性问题:当环境的状态和行动都是未知的时候,智能体必须采取行动去发现它们。探索性问题可以被视为偶发性问题的一种极端情况。
我们将用真空吸尘器世界环境作为一个例子。回想一下,它的状态空间有八个状态,如图3.20所示。一共有三个行动——Left,Right和Suck——目标是清扫完所有的灰尘(状态7和状态8)。如果它的环境是可观察的、确定性的,并且是完全已知的,那么这问题用我们前面描述的任何一个算法都能轻易地解决。例如,如果初始状态是5,那么行动序列[Right, Suck] 就能到达目标状态8。本节剩下的部分将讨论此问题的无传感和偶发情况。探索性问题将在第 4.5 节中论及,对抗性问题则在第六章中讨论。
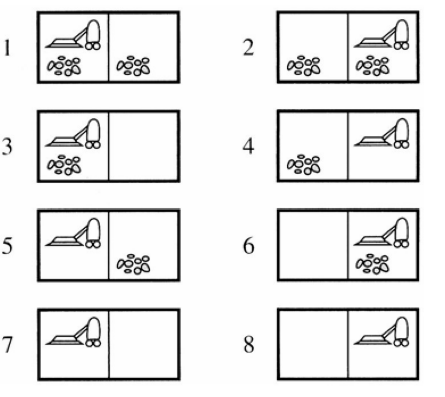
图3.20 真空吸尘器世界的八个可能状态
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











