



2.4.3 基于模型的反射型智能体
对付部分可观测环境的最有效的方法是让智能体追踪记录当时无法观察到的那部分世界。也就是说,智能体应该维持某种取决于感知历史的内部状态,从而至少反映出当前状态的某些不可观察的方面。对于刹车问题,记录内部状态的代价并不昂贵——只需要记录来自摄像头的前一帧画面,允许智能体检测什么时候车辆边缘的两盏红灯同时点亮或关闭。而对于其它驾驶任务诸如换车道,在无法同时看到全部其它车辆的情况下,智能体需要追踪记录其它车辆的位置。
随时更新这个内部状态信息要求在智能体程序的代码中加入两种类型的知识。第一,我们需要某些关于世界如何独立于智能体而发展的信息——例如,正在超车的汽车一般在下一时刻会从后方赶上来,更靠近本车。第二,我们需要某些关于智能体自身的行动如何影响世界的信息——例如,当智能体顺时针转动方向盘的时候,汽车向右转,或者在沿着高速公路向北行驶5分钟后汽车通常应该到达在5分钟前的位置北方大约5英里的地点。这种关于世界如何运转的知识——无论是在简单的布尔电路中还是在完备的科学理论中实现的——被称为世界的模型。使用这样的模型的智能体被称为基于模型的智能体。
图2.11给出了使用内部状态的反射型智能体的结构,显示出如何把当前的感知信息与过去的内部状态结合起来产生当前状态的更新描述。图 2.12 显示了该种智能体的智能体程序。有趣的部分是UPDATE-STATE函数,它负责创建新的内部状态描述。和用已有的知识解释新的感知信息一样,它利用关于世界如何发展的信息来把握世界的不可见部分,并且还必须了解该智能体的行动对世界的状态有什么作用。更详细的例子出现在第十章和第十七章里。
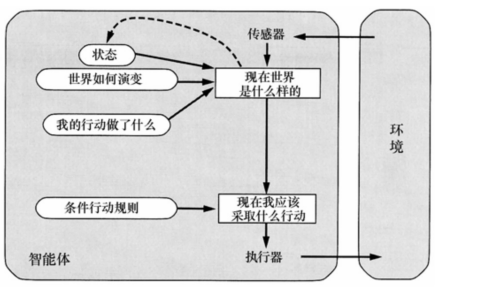
图2.11 基于模型的反射型智能体

图2.12 基于模型的反射型智能体。它使用一个内部模型记录世界的当前状态。然后它按照与反射型智能体同样的方式选择行动
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。













