



【摘要】:组合导航是将两种或两种以上的导航系统进行组合,形成组合导航系统。组合导航系统中各个子系统均有自己的优势和局限性,系统组合的目的在于实现优势互补,相得益彰,提高系统的整体性能,确保整个组合导航系统导航的准确、连续和实时。其中,惯性导航系统INS是组合导航系统中的主导航设备。组合导航系统的信息融合是以计算机为中心,将各个导航子单元传送来的信息加以综合利用和最优化处理。
第8章 水下组合导航系统
组合导航是将两种或两种以上的导航系统进行组合,形成组合导航系统。组合导航系统中各个子系统均有自己的优势和局限性,系统组合的目的在于实现优势互补,相得益彰,提高系统的整体性能,确保整个组合导航系统导航的准确、连续和实时。
为消除INS前期积累误差,确保导航的连续、可靠以及潜航器的隐蔽性,本章涉及的组合导航系统主要包括两类,即惯性导航系统INS和辅助导航系统。其中,惯性导航系统INS是组合导航系统中的主导航设备。用于水下的辅助导航系统目前主要有水下地形辅助导航系统、水下地貌辅助导航系统和地磁辅助导航系统。
组合导航系统的基本工作原理如图8-1所示。
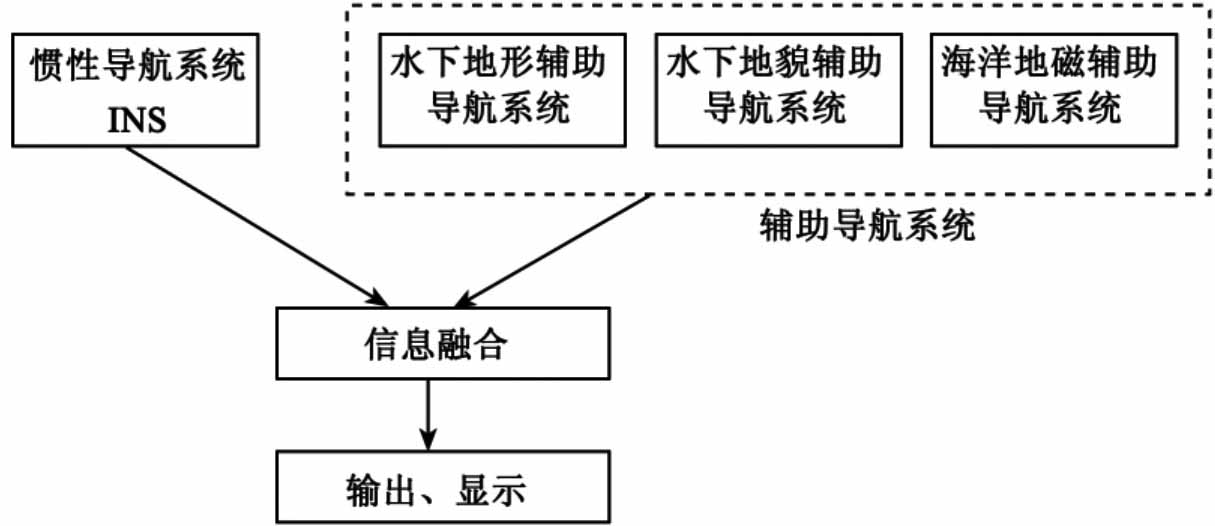
图8-1 组合导航系统组成
组合导航系统的信息融合是以计算机为中心,将各个导航子单元传送来的信息加以综合利用和最优化处理。卡尔曼滤波是实现信息融合的关键。
信息融合后得到的最佳当前运动状态估计参量可通过输出设备进行输出和显示。输出、显示设备属于外部设备。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











