



子模块五 ARPA显示方式及选用
学习目标:掌握数据显示器和PPI显示器的显示内容;
掌握各种显示方式的特点及选用原则。
重点难点:本船运动显示模式、图像指向显示模式、矢量显示模式。
传统的船用雷达的终端设备普遍采用模拟式显示器。采用模拟电路和器件径向圆扫描输出模拟式PPI图像。输出的信息内容仅限于目标的距离、方位及据此构成的原始视频平面图像。
ARPA以微处理机为核心并大量采用数字技术。在ARPA中,采用光栅扫描TV显示技术,其图像分辨率可达1 024×1 024,甚至更高。进入显示通道的视频回波经过预处理、模数转换和信号检测等步骤,按照径向扫描的顺序保存于存储器中,经过扫描方式转换器将其转换成直角坐标的方式显示,然后将其显示在PPI上,实现了回波图像的高精度、高稳定性和高亮度显示。
一、数据显示器
(一)ARPA数据显示器显示的主要内容
ARPA数据显示器显示的主要内容是目标船和本船运动参数与危险预测参数。
(1)跟踪目标数据:方位、距离、真航向、真航速、CPA、TCPA。
(2)本船运动数据:航向、航速。
(二)其他数据的显示
不同ARPA数据显示器,其数据的显示不尽相同,可能有下列数据。
(1)矢量时间:屏幕上显示的矢量代表的时间,例如:0~99min,可调。
(2)尾迹点及间隔时间:ARPA显示的目标船和本船航迹点的间隔时间。例如:4点,点间隔2min,显示目标现在位置前8min的历史航迹。
(3)偏移数据:潮流引起的流向、流速值。
(4)安全判据:预先设置的MINCPA、MINTCPA值。
(5)位置数据:录取符号距离本船的位置数据。
(6)故障指示:由此序号可查得故障内容、位置及原因。
(7)目标过本船船头距离(BCR-Bow Cross Range)与过船头时间(BCT-Bow Cross Time)。
ARPA数据显示器,有的用发光二极管(LED)显示器,有的用专用字符显示器(VDU),有的将数据显示器与综合图形显示器合二为一,即在图形显示器的空当区显示数据。
练一练
在ARPA模拟器上读取本船航向与航速。
二、综合图形显示器
ARPA终端显示器可以同时显示目标回波图像和各种字符,故又称为“综合图形显示器(PPI)”。
ARPA显示器显示的综合态势图包括的主要内容如下。
(一)数字视频或原始视频
雷达原始视频经杂波处理、量化处理后成为数字视频(亦称处理视频)。因为其杂波干扰已明显减少,并采用高亮度显示技术,因此图像质量比原始视频图像好。但是,因为数字化加工使强弱视频信号取齐,原始视频图真实程度与量化单元粗细相关,越粗,真实感越差。甚至有些微小信号在数字化过程中可能当作杂波过滤掉。所以ARPA还可选择原始视频显示,以便对比。
(二)ARPA显示的各种符
1. 定性符号
(1)录取符号(捕捉符号):如“□”、“+”、“〇”、“×”等。
(2)指示目标性质标识符号。
(3)指示安全目标用“· ”“ ”等符号。
”等符号。
(4)危险目标用“△”、“〇”、“◇”,跟踪目标编号闪烁,夜间在编号旁显示“T”。
(5)紧急危险目标常以危险目标闪烁表示。
(6)闯入警戒圈(环、区)的目标用“▽”、“<”、“〇”符号表示。
(7)刚刚丢失的目标用“□”、“∠”、六边形PAD符号闪烁等表示。
(8)正被指定读数的目标用“△”、“×”、套在目标现位置上的录取符、套在目标编号上的“□”等符号表示。
(9)指北符号:常用“∣”或“┆”等表示。
2. 定量符号
(1)相对矢量(Relative Vector):其起点表示目标现位置,矢量末端表示对应矢量时间的预测到达位置,方向表示相对运动航向,长度表示对应矢量时间的预测航程。
(2)真矢量(True Vector):其方向表示真运动航向,其他含义与相对矢量类同。
3. 图示符号
前面所提到的PPC、PAD、警戒圈、扇形警戒区等,不再复述。
(1)港口视频地图:用线段及点、圆圈等各种标志在显示视频图形表示港口海图的轮廓。
(2)电子海图:按照国际海道测量组织IHO“S-57”标准制作的ENC(电子航行图),可由光盘等输入设备输入ARPA系统,需要时可调出相关海图,并进行海图校准工作,使目标电子回波与海图中该目标重合,即可利用海图进行导航。
(3)限制线:用虚线或直线段画出陆地、岛屿等限制ARPA自动录取、跟踪处理的区域,以提高自动录取的目的性。
(4)历史航迹(BACK TRACK HISTORY或POST POSITIONS):ARPA用小圆点“· ”表示目标现位置前的历史航迹(尾迹),按照IMO有关“ARPA性能标准”规定,ARPA应能显示目标过去至少4个等时间间隔的位置,并应显示出该时间间隔的大小,其时间间隔与使用的量程成比例。显示目标历史航迹有两点意义:
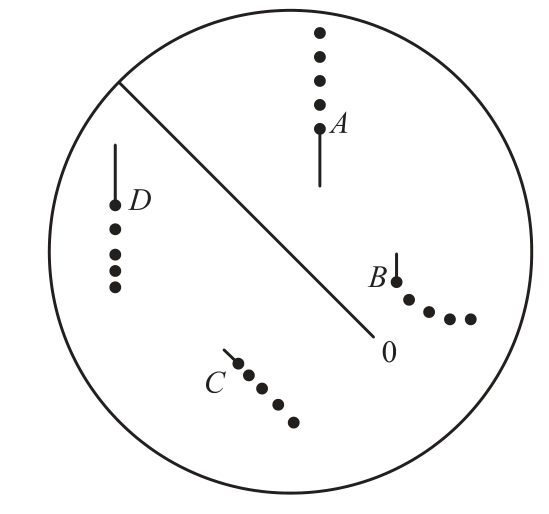
图6-32 判断目标当前的机动
第一,可用于判断目标有否机动。多数ARPA都在采用真矢量显示方式时显示目标真运动航迹,可直观判断目标当前的机动。如图6-32所示,可以看出目标A保速(航迹点等间隔)、保向;目标B保速、右转向;目标C减速(点间隔先稀后密)、保向;目标D加速(点间隔先密后稀)、保向。
注意:有的ARPA也可在采用相对矢量显示方式时显示相对运动航迹,此时屏上航迹点的转变未必意味着目标航向的变化,要防止判断错误。
第二,可用于检查跟踪能力是否正常。当显示的目标航迹不规则或不稳定时,说明ARPA此时目标跟踪电路工作有问题,显示的目标数据不可轻信。该功能也可用于检测ARPA对目标机动的跟踪能力,即可验证ARPA对目标大幅度改向能维持正常跟踪的极限值。
(5)“尾迹”(TRAIL):尾迹最先是出现在传统的雷达上的术语。由于它们的显像管上涂的荧光粉层是长余辉的(余辉时间约为2s~3s)。在近量程使用雷达时目标的回波强,若目标移动的较快,在目标图像的后面留下的一段连续的余辉。
尾迹显示的优点:尾迹的显示不必录取和跟踪,不存在“误跟踪”和“目标丢失”的缺点。相反,目标转向越大,尾迹的变化越明显,越容易被发现。由于尾迹的显示是对雷达探测目标后寄存的位置信息的直接读取,紧跟在目标图像后连续显示,所以突出了它的及时、实时和可靠等优点。在雷达发射,探测目标30s后,就可进行尾迹显示。
练一练
在ARPA模拟器上通过尾迹判断目标船运动状态。
(三)数字和字母
ARPA的综合图形显示器可显示数字和字母。例如:
(1)R显示在该目标回波旁,表示基准参考目标;
(2)字母A~T表示已录取跟踪目标的序号,ARPA屏上只显示第一个被录取跟踪的目标编号“A”,其他暂存在RAM中,只有在指定读数时,才显示其编号;
(3)T(有的ARPA显示“SIM”或“TRIAL”),表示ARPA正工作在试操船状态,显示试操船的模拟画面,而非实际态势图;
(4)阿拉伯数字表示故障的序号,从说明书可查出对应的故障内容、原因。
(四)综合态势图
矢量型ARPA综合态势图如图6-33所示。
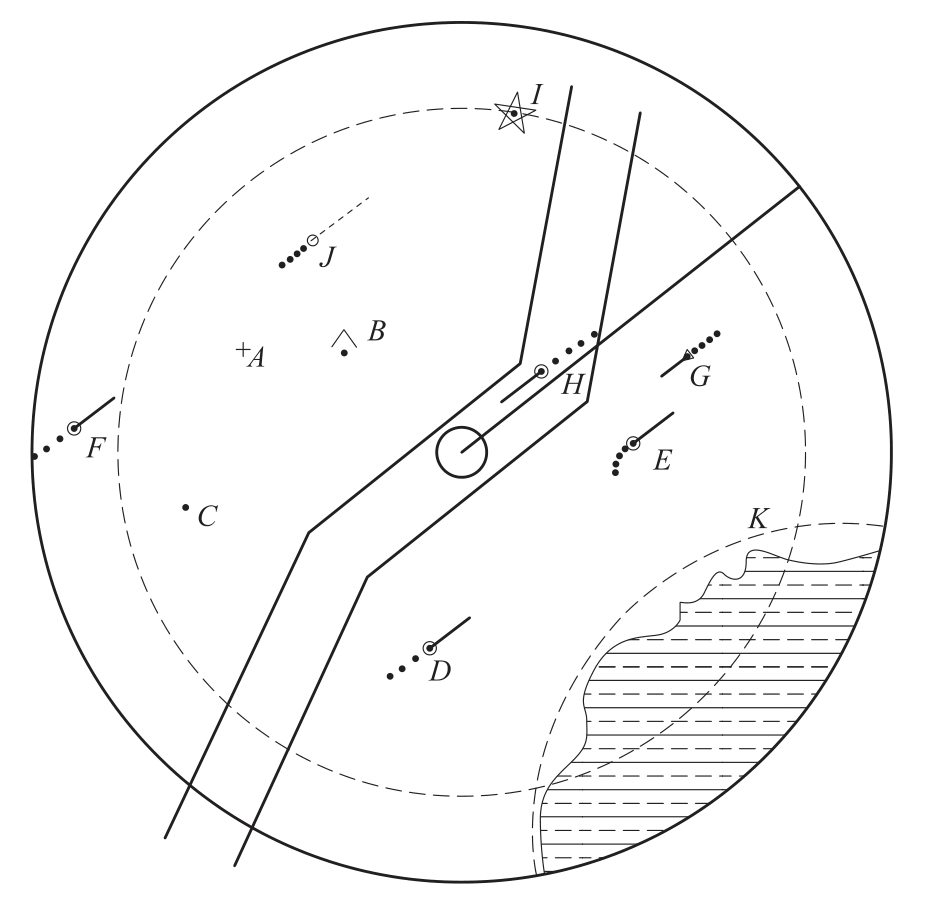
图6-33 矢量型ARPA综合态势图
图中:A—录取符(操纵杆标志);B—初始录取符,显示至矢量出现;C—未录取跟踪目标;D—安全目标、航迹点表示保速、保向;E—安全目标,航迹点表示保速、右转向;F—安全目标、进入屏幕的还只有3个航迹点;G—危险目标、视觉报警;H—紧急(或称“非常”、“立即”)危险目标,视频、音响同时报警;I—目标闯入警戒圈;J—丢失目标,矢量变为虚线、音响报警。
说明:
(1)ARPA录取后30s(多数1min,个别仅20s),开始出现矢量,矢量稳定约需3min;
(2)指定读出数据的目标,标识符(Λ、O、△、◇)闪烁。
PAD型ARPA综合态势图如图6-34所示。
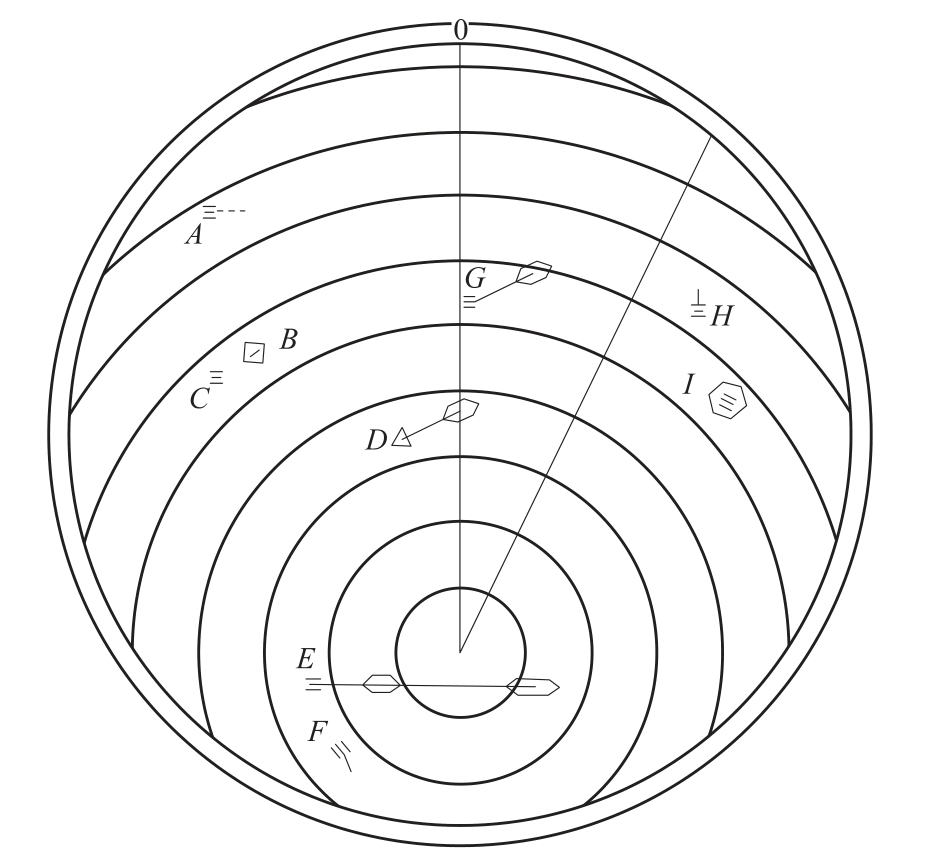
图6-34 PAD型ARPA综合态势图
本船为首向上、偏心、相对运动、真矢量及PAD显示方式。目标A为已跟踪目标,经天线8周扫描后,目标上出现一段由点线构成的真矢量,预示航程;目标B以外面的“□”为录取符号;目标C为已被录取目标,在目标内外有两小段同心圆弧,即跟踪窗;目标D以与本船同样速度行驶,在其矢量前方出现的PAD和本船首线相交,有碰撞危险,在目标D外有“△”标识符,是由操作者设置的,表示正被指定读出数据;目标E速度高于本船,有两个PAD;F只显示一段实线,表示为该目标真矢量,PAD出现在屏外,无法看到;目标G取后已经30周天线扫描,在真矢量延伸线上出现一个PAD,目标的速度低于本船;目标H处在本船前方,速度高于本船,无PAD;目标I为固定目标,无速度矢量,在目标周围显示正六边形PAD。
三、各种显示方式的特点及选用
(一)本船运动显示模式
目前多数ARPA能提供相对运动(R.M — Relative Motion)和真运动(T.M — True Motion)两种模式。
相对运动代表本船位置的扫描中心在屏上保持不变,其主要特点是本船位置在屏上不动,固定或运动目标回波均相对于本船而移动。
真运动代表本船位置的扫描中心在屏上随着本船运动而相应移动,其主要特点是本船位置的扫描中心及运动目标回波均按其真实航向(或受潮流影响时的航迹向)成比例航速移动,而固定目标不动。如图6-35所示的古野雷达,当本船达到了显示半径的75%中的一个位置B时,它会自动复位到船首标志延伸后的另一个显示半径的75%的A位置。根据计程仪提供的速度不同,相应有对水T.M和对地T.M。用于避碰的只能是对水T.M。
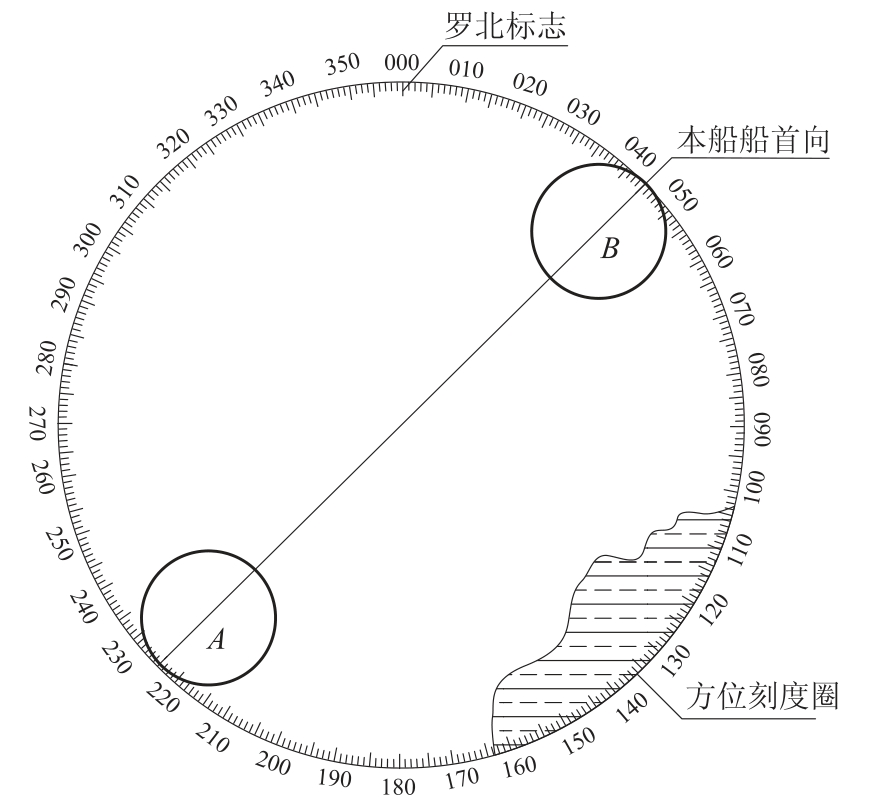
图6-35 真运动模式
(二)图像指向显示模式
图像指向显示可有船首向上(Head Up)、北向上(North Up)和航向向上(Course Up)三种模式。
1. 船首向上模式
本船位于屏幕中心,船首线始终指固定方位刻度圈的0°,显像直观,便于判明前方来船是处在本船的左或右舷。但当本船改向或舵角不稳时,不能在稳定方位上检测到目标信号,在用扫描相关技术来检测目标信号和去杂波时,有可能使目标回波当作杂波清除,因此ARPA自动标绘不使用这种工作模式,该模式仅用于显示雷达原始视频,以作对比,如图6-36所示。
2. 北向上模式
本船位于屏幕中心,须接入罗经信号。方位刻度圈的0°代表罗经北,船首线指向方位圈的度数即本船航向。当本船改向时,船首线随之改向。但图像并不随之转动。当航向为180°左右时,图像倒置,不直观,观测不便,如图6-37所示。
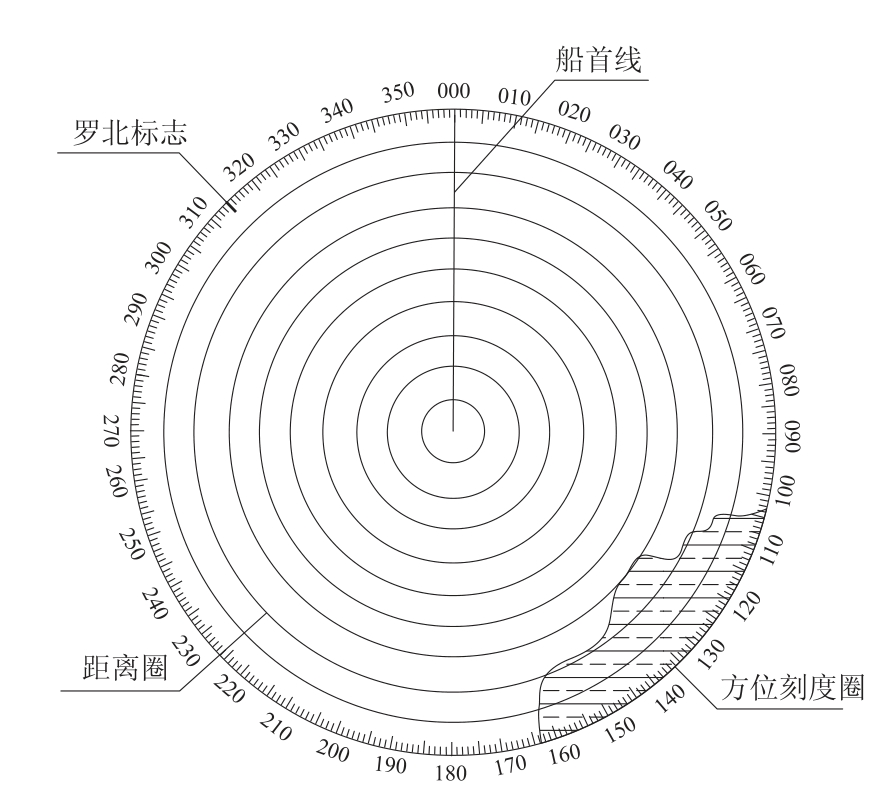
图6-36 首向上模式
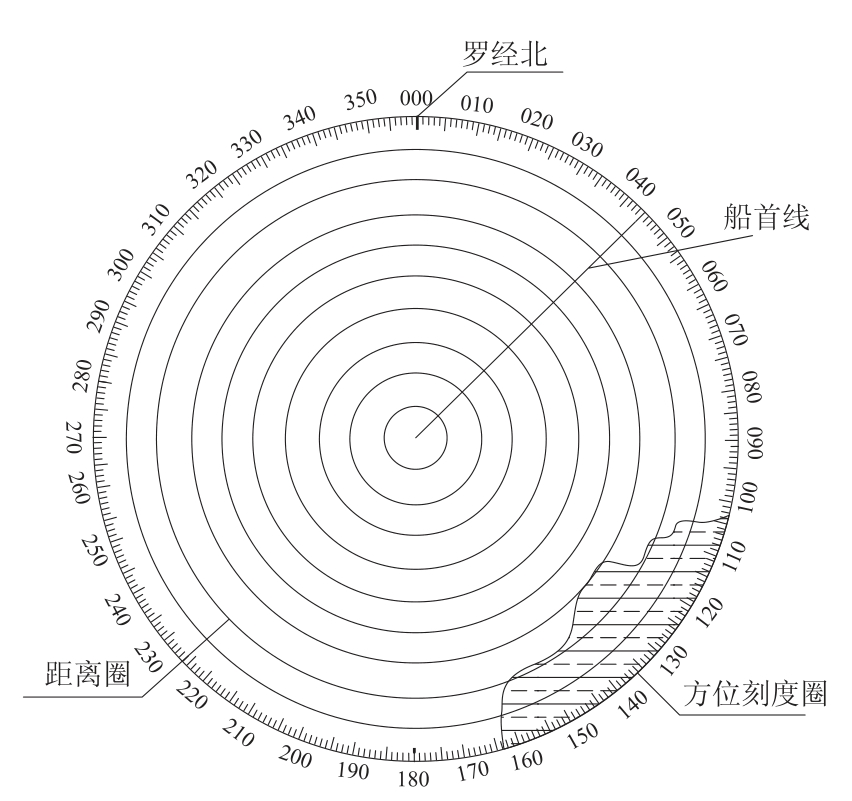
图6-37 北向上模式
3. 航向向上模式
此模式也称新船首向上(NEW HEADING UP)模式,须接入罗经信号。为增加前方视野,也可使用偏心显示(OFF CENTER),本船船位下移1/2半径。如图6-38与图6-39所示,首线(航向线)向上,图像直观,保留了船首向上模式的优点。当本船改向时,船首线随之改向偏离0°。但图像并不随之转动。改向结束后,驾驶员可以按NEW HD G UP键,使船首线指向方位圈
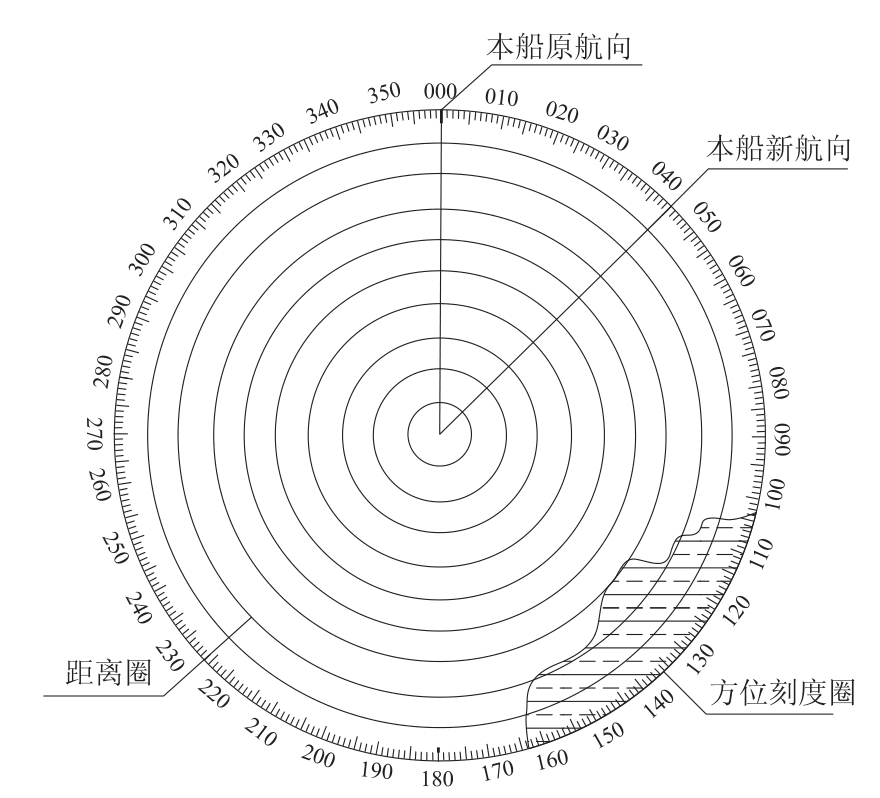
图6-38 航向向上模式
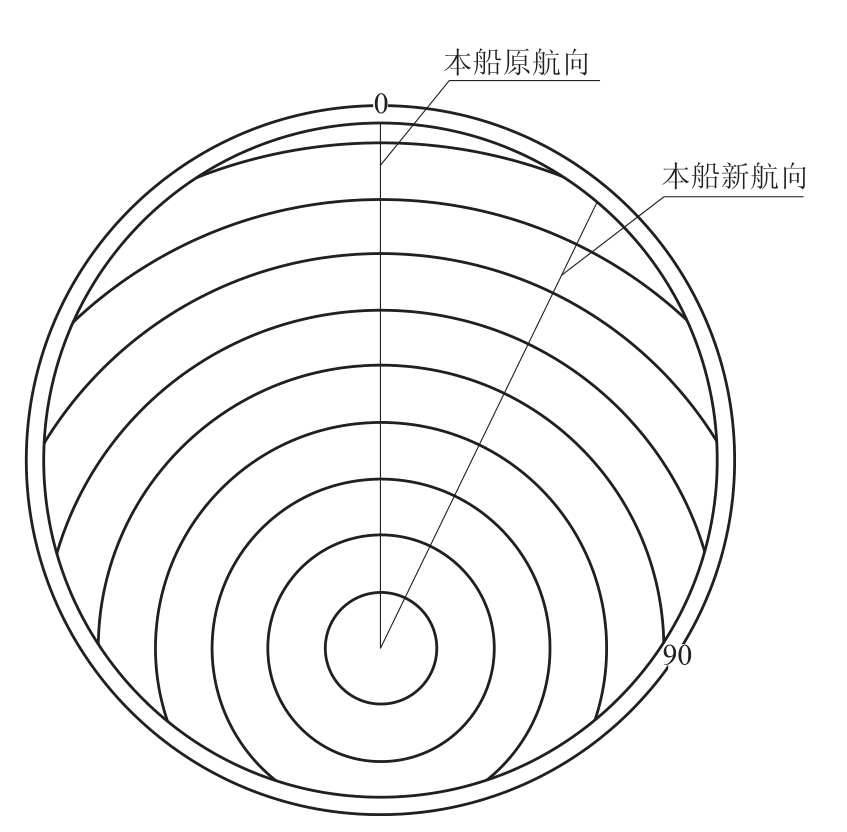
图6-39 航向向上偏心模式
的零度,此时整幅图像随之一起转动。当航向在180°左右时,没有北向上模式时的那种“图像倒置”现象。航向向上模式综合了船首向上、北向上两种模式的优点,并克服了二者的缺点。
因此,ARPA中采用的北向上、航向向上两种模式,均须接入罗经信号,图像具有稳定的特点,可方便地将图像和海图对照而快速定位。在狭水道等多改向航段,首向没有相遇船时,主要用于定位,可用北向上模式。若既要定位,又要避碰,尤其本船向南航行时,则选用航向向上模式更为方便。
练一练
在ARPA模拟器上设置显示模式为北向上。
(三)矢量显示模式
ARPA可用矢量表示被跟踪目标的动态,矢量有始端、长度、方向及末端。ARPA都能提供相对矢量(R.V — Relative Vector)和真矢量(T.V — True Vector)两种显示方式供选用。
1. 相对矢量模式特点
(1)本船无相对矢量,故在船首线上不显示矢量线。固定或运动目标显示相对矢量,其起点表示目标现位置,矢量末端表示对应矢量时间的预测到达位置,方向表示相对运动航向,长度表示对应矢量时间的预测航程。
(2)与本船同向、同速的运动目标不显示相对矢量。
(3)从本船到目标R.V延长线(R.M.L)的垂足为CPA,目标航行至CPA的航行时间为TCPA。由于R.V显示模式可评估目标逼近本船的速度,可从屏上观测和估算CPA、TCPA,以评估相遇船和本船有无碰撞危险,当R.V指向本船或与设置的MINCPA圆相交或相切,则表明该目标为危险目标。因此,R.V显示模式可快速判断本船与所有目标是否存在碰撞危险。
2. 真矢量模式特点
(1)本船与运动目标均显示T.V,T.V长度比即速度比。如前所述,根据目标和本船的速度比及相对位置关系,可决定形成0、1、2个PPC。
(2)固定目标没有T.V。如果在固定目标上显示T.V,则是因受风、流影响而产生的,此时本船和其他被跟踪目标上显示的均为对水T.V。当ARPA用于定位导航时,必须修正风、流影响,显示对地T.V。方法如下:
① 手动偏移修正(Manual drift):手动输入流向、流速,使固定目标上的T.V为0,即表示风、流影响已修正。
② 自动偏移修正(Auto drift):ARPA自动计算固定目标上T.V的方向和大小,并以其相反值加到本船及已跟踪的固定或其他运动目标的矢量计算中,使固定目标的T.V为0,即表示风、流影响已自动修正。ARPA在显示器上显示计算的流向、流速及风流压角等数据。
无论是手动修正或自动修正,目的是使固定目标的T.V为0。本船及目标的T.V变为对地T.V。本船对地T.V显示在偏离航向线的航迹线方向上,航迹线与航向线的夹角即风流压角。目标真矢量也仅代表预测航迹而非其航向。因此,不能以其观察目标航向的变化。
(3)若目标的CPA=0(意即其R.V延长线R.M.L穿过本船现位置)时,则该目标T.V延长线与本船航向线交点为PPC。若PPC落在本船航向线上(或附近),则表示有碰撞危险。若本船和目标的T.V矢端重叠或离得很近,则也表示有碰撞危险。
(4)目标T.V与目视线(本船和目标的连线)夹角,可看出目标态势角(Aspect),后者又称目标舷角(本船相对于目标的方位)。根据态势角大小可判断两船会遇情况。
(5)根据目标T.V和真航迹的变化可判断目标是否机动。操作者直接在屏上观察目标真航向、真航速及目标态势角,有助于做出正确的避让决策。
想一想
ARPA矢量可调有何实用意义?
资料卡
IMO有关矢量线的显示模式的规定
IMO关于ARPA的性能标准规定如下:
(1)仅以矢量形式提供预测信息的ARPA应有绝对矢量和相对矢量两种选择;
(2)所选用的矢量模式应有指示;
(3)显示的矢量时间应可调并有明确的指示。
相对矢量线表示目标相对运动的方向和位置,本船没有相对矢量线。绝对矢量线表示目标或本船绝对运动的方向和位置。
(四)目标动态预测显示模式
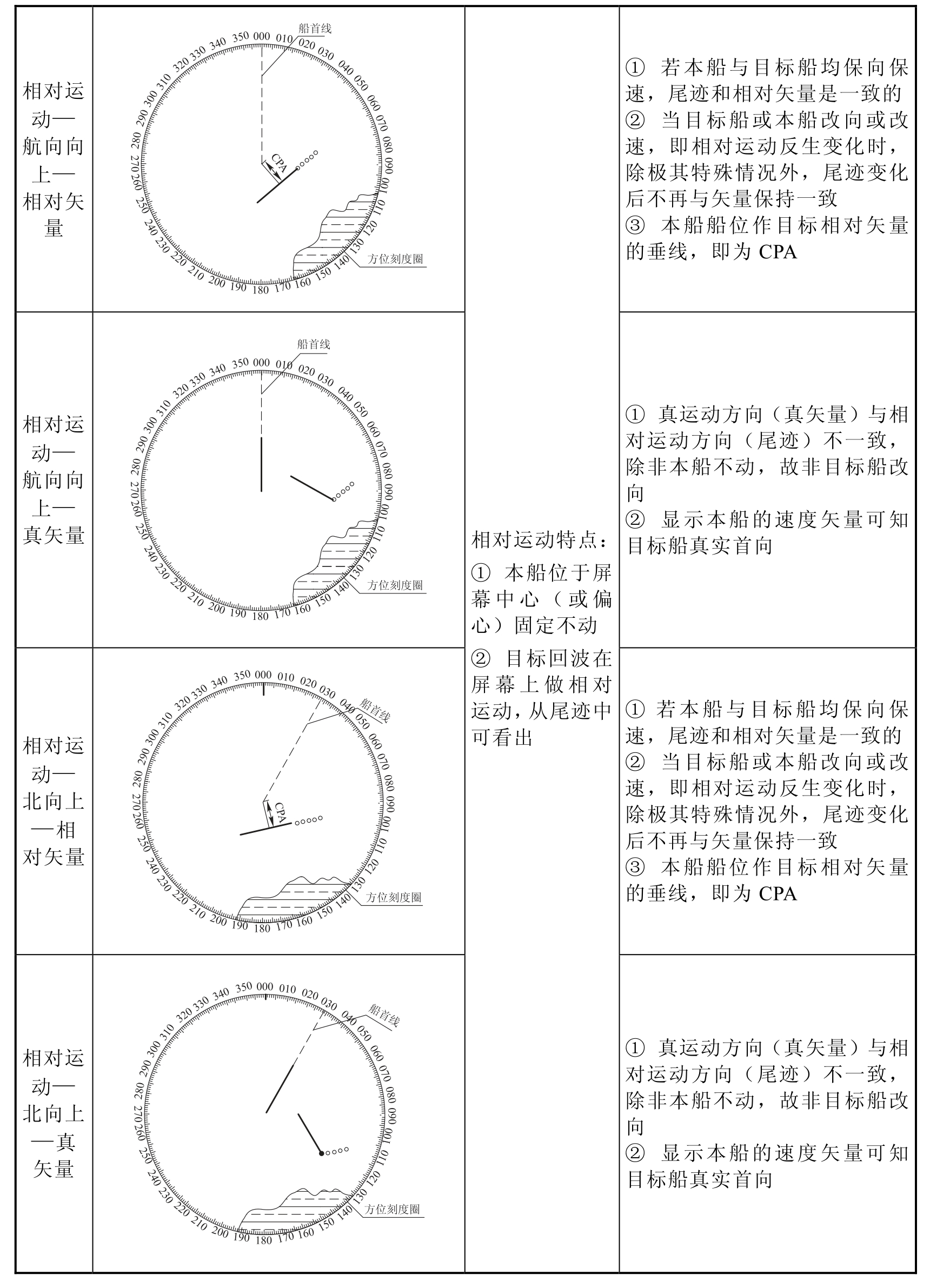
综上所述,在ARPA显示系统中,有两种图像指向——北向上和航向向上,两种矢量——相对矢量与真矢量,两种运动显示方式——真运动与相对运动,这些显示方式可以混合成8种显示方式,如表6-3所示。
在大洋航行时,驾驶员主要关心本船与目标船有无碰撞危险,可使用相对运动—相对矢量—航向向上的显示方式。在狭水道航行时,驾驶员希望将屏幕显示的图像与海图对照,便于定位及频繁改向的图像稳定要求,可使用真运动—真矢量—北向上的显示方式。
议一议
船舶在进出天津港航行时应该采用哪种显示方式?为什么?
表6-3 8种显示方式
续表

思考与训练
1. ARPA按显示器扫描方式可分为。
A. 矢量型和APD型 B. 真矢量和相对矢量
C. 径向圆扫描和光栅扫描 D. 真运动和相对运动
2. ARPA数据显示器可显示的参数有。
A. 本船的运动参数 B. 目标的运动参数和避碰参数
C. 矢量时间和航迹点间隔时间 D. A+B+C
3. 要从历史航迹的间距变化和方向变化,直观地判断目标船是加速还是减速,是右转还是左转,则显示方式应为。
A. 真运动显示方式 B. 相对运动显示方式
C. A或B均可 D. A或B均不能
4. ARPA显示器显示的综合态势图中各种符号有。
A. 定性符号 B. 定量符号 C. 图示符号 D. A+B+C
5. ARPA显示器显示的综合态势图中,下列说法正确的是。
A. 真矢量和相对矢量是定性符 B. 捕捉符和标识符是定性符
C. 限制线和历史航迹是定量符 D. A、B正确
6. ARPA显示的目标旁显示字母R代表。
A. 报警符号 B. 试操船符号 C. 参考符号 D. 录取目标编号
7. 使用ARPA了解目标船在一段时间内是否改向、变速,可观察目标的。
A. 试操船情况 B. 相对矢量 C. 真矢量 D. 尾迹
8. 在ARPA中,目标的历史航迹点一般是用来。
A. 判断目标是否有碰撞危险 B. 复核避让的目标是否让清
C. 估计跟踪的船是否机动 D. 核查本船采取的措施是否有效
9. 航向向上图像显示方式的优点是。
A. 便于判别相遇船在本船的左舷还是右舷
B. 当航向为180°时,图像画面显得直观
C. 当本船改向时船首线随着改变,但图像稳定
D. A、B、C都是
10. ARPA图像指向中,下述不正确的是。
A. 船首向上有ARPA功能 B. 真北向上有ARPA 功能
C. 航向向上有ARPA功能 D. 船首向上无ARPA功能
11. 选用相对运动、相对矢量显示模式,当本船改向时,在ARPA雷达显示屏上可见到。
A. 所有矢量均变 B. 所有矢量均不变
C. 目标船矢量不变,本船矢量方向变 D. 上述均不对
12. 一般在大海上使用ARPA观察与物标有无碰撞危险,通常选用显示方式。
A. “相对运动”“航向向上”“真矢量”
B. “相对运动”“航向向上”“相对矢量”
C. “真运动”“真北向上”“真矢量”
D. “真运动”“真北向上”“相对矢量”
13. 矢量时间可调的意义在于。
A. 相对矢量显示时,预测目标位置
B. 真矢量显示时,预测目标及本船的位置
C. 便于直观判断碰撞可能
D. 上述三项都对
14. 在ARPA中,可以通过判断目标是否改向的方法是。
A. 本船真矢量 B. 目标的相对矢量与相对尾迹比较
C. 目标的相对矢量与真尾迹比较 D. 目标的真矢量与真尾迹比较
15. 在对水真运动显示方式中,荧光屏上不动的目标是。
A. 同向同速船 B. 如小岛等静止目标
C. 对遇船 D. 随水漂流的目标
16. 要快速判断本船与目标船之间有无碰撞危险时,应选用的矢量方式是。
A. 真矢量 B. 相对矢量
C. A或B均可 D. A和B均不行
17. 船用雷达的首向上相对运动显示方式的特点是。
A. 船首线代表船头方向
B. 本船转向时,船首线指向固定刻度零位不动
C. 屏上固定刻度圈读数是相对方位
D. A、B、C均正确
18. 相对矢量显示方式适用场合是。
A. 需要迅速作出正确的避让决策时
B. 需要快速判断本船与所有目标船有否碰撞危险时
C. 需要从屏上看清目标船真航向、真速度时
D. 需要从屏上看清本船真航向、真航速时
19. 真矢量显示方式适用场合是。
A. 需要迅速作出正确的避让决策时
B. 需要快速判断本船与所有目标船有否碰撞危险时
C. 需要从屏上估算出CPA、TCPA时
D. 需要从屏上看出目标是否发生了机动时
20. 某ARPA用相对运动、相对矢量显示模式时,若荧光屏上仅有某一目标的尾迹与矢量线的方向不一致,则可说明。
A. 本船转向或变速了 B. 本船转向了
C. 目标船转向或变速了 D. 目标船转向了
21. 某ARPA用相对运动、相对矢量显示模式,若本船改向或变速,则在荧光屏上可见到。
A. 仅有某一目标的尾迹与矢量线方向不一致
B. 所有目标的尾迹与矢量线方向不一致
C. 屏上所有图像状态不变
D. 以上均不对
22. 某ARPA用真运动、真矢量显示模式,当本船改向,在荧光屏上可看到。
A. 所有矢量均变
B. 所有矢量均不变
C. 目标船矢量不变,本船矢量方向变
D. 目标船矢量长度不变,但方向变
23. ARPA按显示被跟踪目标的动态方式可分为。
A. 矢量型和图示型 B. 真矢量和相对矢量
C. 圆扫描和光栅扫描 D. 光栅扫描和TV扫描
24. ARPA在处理信号时,如本船转向,则。
A. 矢量与航向同时改变 B. 矢量先改变后航向改变
C. 航向先改变后矢量改变 D. 航向、矢量都不变
25. 选用ARPA相对矢量可提供的信息有。
A. 评估目标逼近速度,对碰撞危险的目标能迅速作出评估
B. 目标的雷达态势角,可判断会遇情况
C. 目标的相对矢量指出了其速度的大小
D. 以上述都不对
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。









