



2.6.4 数控机床的坐标系统及运动方向
为了便于编程时描述机床的运动,简化程序的编制方法及保证资料的互换性和加工程序的通用性,数控机床的坐标和运动方向均已标准化。国际标准化组织以及一些工业发达国家都先后制定了数控机床的坐标和运动命名的标准。我国机械工业部也于1982年颁布JB3051 —82标准,其命名原则如下:
(1)刀具相对于零件运动的原则
这一原则认为零件不运动,使编程人员能在不知道是刀具移动还是零件移动的情况下,就可以依据零件图样,确定机床的加工过程。
(2)标准坐标(机床坐标)系的规定
为了确定机床上的成型运动和辅助运动,必须先确定机床上运动的方向和运动的距离,这就需要一个坐标系,这个坐标系称为机床坐标系。
1)机床坐标系。标准的机床坐标系是一个右手笛卡尔直角坐标系,如图2-16所示。图中规定了X、Y、Z三个直角坐标轴的方向与机床的主要导轨相平行,A、B、C三个旋转坐标的方向由右手螺旋法确定。
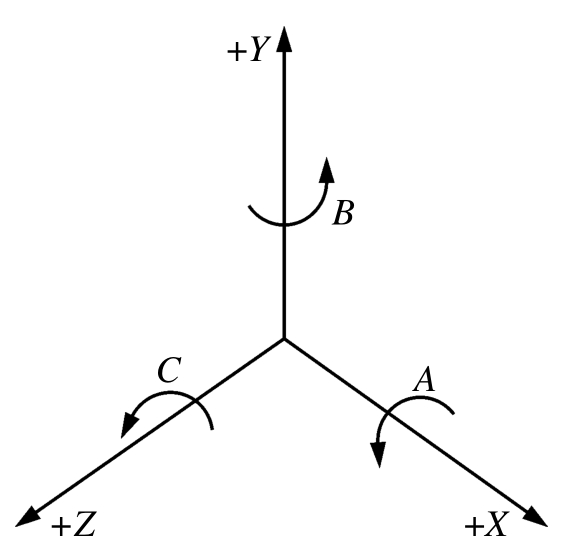
图2-16 右手笛卡尔直角坐标系
2)运动方向。机床某一部件的运动正方向规定为增大零件与刀具之间距离的方向。
① Z坐标:Z坐标与主轴轴线平行,其正方向是增大零件与刀具之间距离的方向。故数控机床的主轴轴线为Z轴,床尾方向为+Z向;在钻镗加工中,钻入或镗入零件的方向是Z的负方向。
② X坐标:X坐标是水平的(平行于零件装夹面),是刀具或零件定位平面内的主要坐标。在零件回转类的车床、磨床上,X方向为径向且平行于横向滑座,X的正方向是横向滑座主要刀架上刀具离开零件回转中心的方向;在刀具回转类的铣床上,X运动的正方向是从主要刀具轴向零件看时的右方;对于桥式龙门机床,当由主轴向左侧立柱看时,X运动的正方向指向右方。车床与卧式铣床的X坐标如图2-17、图2-18所示。
③ Y坐标:根据X和Z的运动,按照右手笛卡尔直角坐标系来确定。
④ 旋转坐标:在图2-16中,A、B、C相应地表示其轴线平行于X、Y、Z的旋转坐标。A、B、C正向为在X、Y、Z方向上,右手螺旋前进的方向。
⑤ 机床坐标系的原点:标准坐标系原点(X=0,Y=0,Z=0)的位置是任意选择的,A、B、C的运动原点(A=0,B=0,C=0)也是任意的。机床坐标系是机床固有的坐标系,其原点在说明书中均有规定,一般利用机床机械结构的基准线来确定。例如,有的机床设有零位,这个零位就是机床坐标系的原点。这个机床零位在机床制造出来时就已确定,不能随意改动。
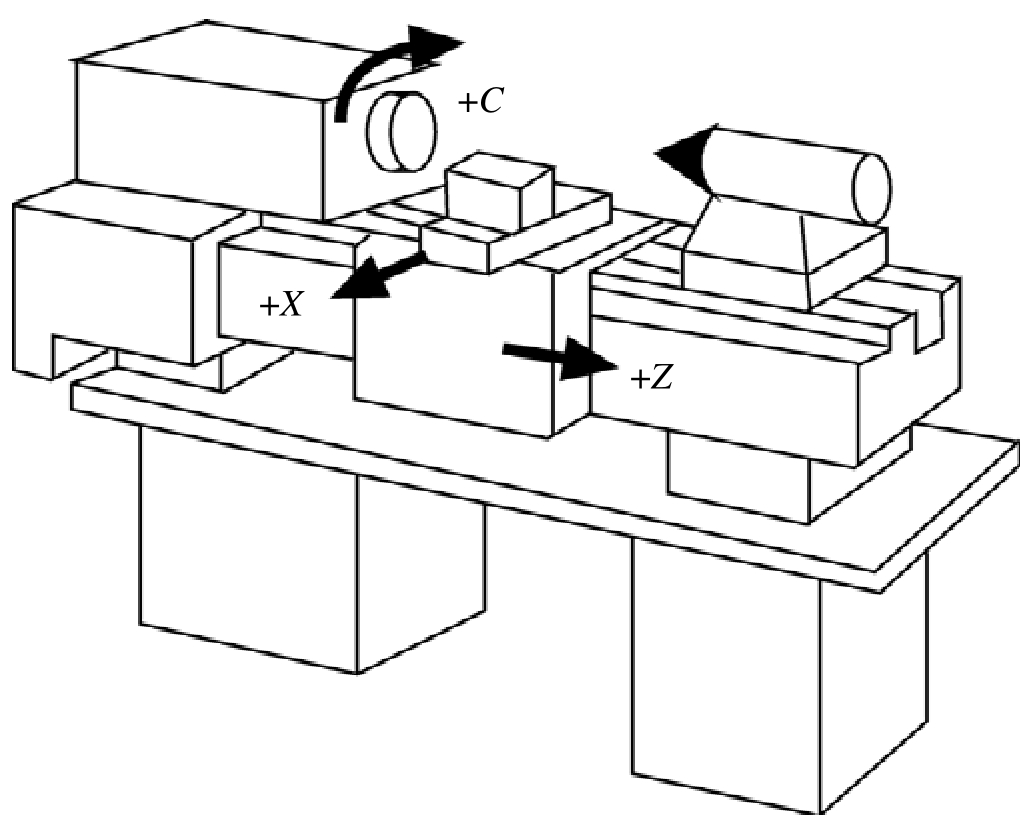
图2-17 普通车床

图2-18 卧式铣床
⑥ 附加坐标:如果在X、Y、Z主要直线运动之外另有第2组平行于它们的运动,就称为附加坐标运动,它们分别被指定为U、V、W。如还有第3组运动,则分别指定为P、Q、R。若有平行或可以不平行于X、Y、Z的直线运动,则可以相应地规定为U、V、W、P、Q、R。如果除第1组回转运动A、B、C外,还有平行或不平行于A、B、C的第2组回转运动,可指定为D、E、F。
⑦ 零件的运动:对于移动部分是零件而不是刀具的机床,必须将前面介绍的移动部分是刀具的各项规定,在理论上作相反的安排。此时用带“′”的字母表示零件正向运动,如用+X′、Y′、Z′表示零件相对于刀具正向运动的指令。
数控机床的坐标数是指有几个运动采用了数字控制。如一台铣床,其X、Y、Z三个方向的运动都能进行数字控制,则它就是一个坐标数控铣床。有些机床的运动部件较多,在同一坐标轴方向上会有两个或更多的运动是数控的,因此还有4坐标、5坐标数控机床。不要把数控机床的坐标与“2坐标加工”、“3坐标加工”相混淆。一台三坐标数控铣床,若控制系统只能控制任意两个坐标联动,则只能实现2坐标加工,如图2-19所示。有时对于一些简单立体型面,也可以采用这种机床加工,即某两个坐标联动,另一个坐标进行周期进给,将立体型面转化为平面轮廓加工,这也叫做“2.5坐标加工”。若控制系统能控制三个坐标联动,则能实现3坐标加工,如图2-20所示。

图2-19 2坐标加工
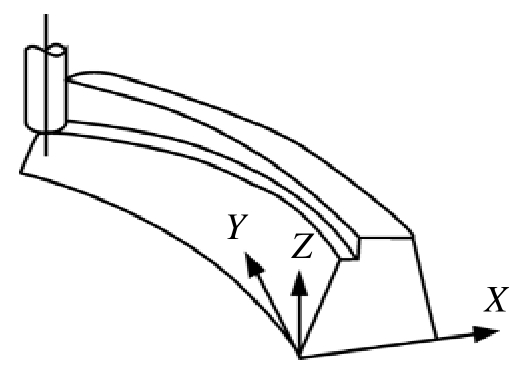
图2-20 3坐标加工
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











