



【摘要】:机载激光雷达测量的数据处理较为复杂,包括动态GPS数据后处理、INS和GPS组合姿态确定、不同传感器观测值间的时间同步、激光脚点三维坐标的计算。激光脚点的WGS-84坐标最终要借助三组数据来计算:系统检校和安置参数、不同扫描角条的激光测距值及位置和姿态数据。先将激光脚点数据由WGS-84坐标变化到所采用的局部坐标系统,所得的结果为随机分布的带有高程和位置的激光脚点点集。有关机载激光雷达测量数据处理的详细讨论见本书的后续章节。
2.6.2 内业数据处理
完成野外飞行任务后,可得到两组数据:飞机位置和姿态(POS)数据以及瞬时扫描角的激光距离测量值。若位置数据的精度优于1dm,姿态精度优于0.02°,则可计算激光脚点在地固坐标系中较为精确的三维坐标。
机载激光雷达测量的数据处理较为复杂,包括动态GPS数据后处理、INS和GPS组合姿态确定、不同传感器观测值间的时间同步、激光脚点三维坐标的计算。激光脚点的WGS-84坐标最终要借助三组数据来计算:系统检校和安置参数、不同扫描角条的激光测距值及位置和姿态数据。进一步处理的主要目标在于计算出数字高程模型及地物提取。先将激光脚点数据由WGS-84坐标变化到所采用的局部坐标系统,所得的结果为随机分布的带有高程和位置(有些包括激光脚点的强度信息)的激光脚点点集。然后需要将地面点与非地面点(如建筑物和植被等)分开,即数据的滤波分类,需要各种滤波算法和处理方法。滤波可以使用原始数据或内插规则格网,不过,后者的不足之处是受内插误差的影响,但可使用现有的滤波方法进行图像处理。通过数据的滤波后,就能内插生成DEM以及后续的地物提取、建筑物三维重建、3D城市模型等高层次处理,处理流程见图2-7。有关机载激光雷达测量数据处理的详细讨论见本书的后续章节。
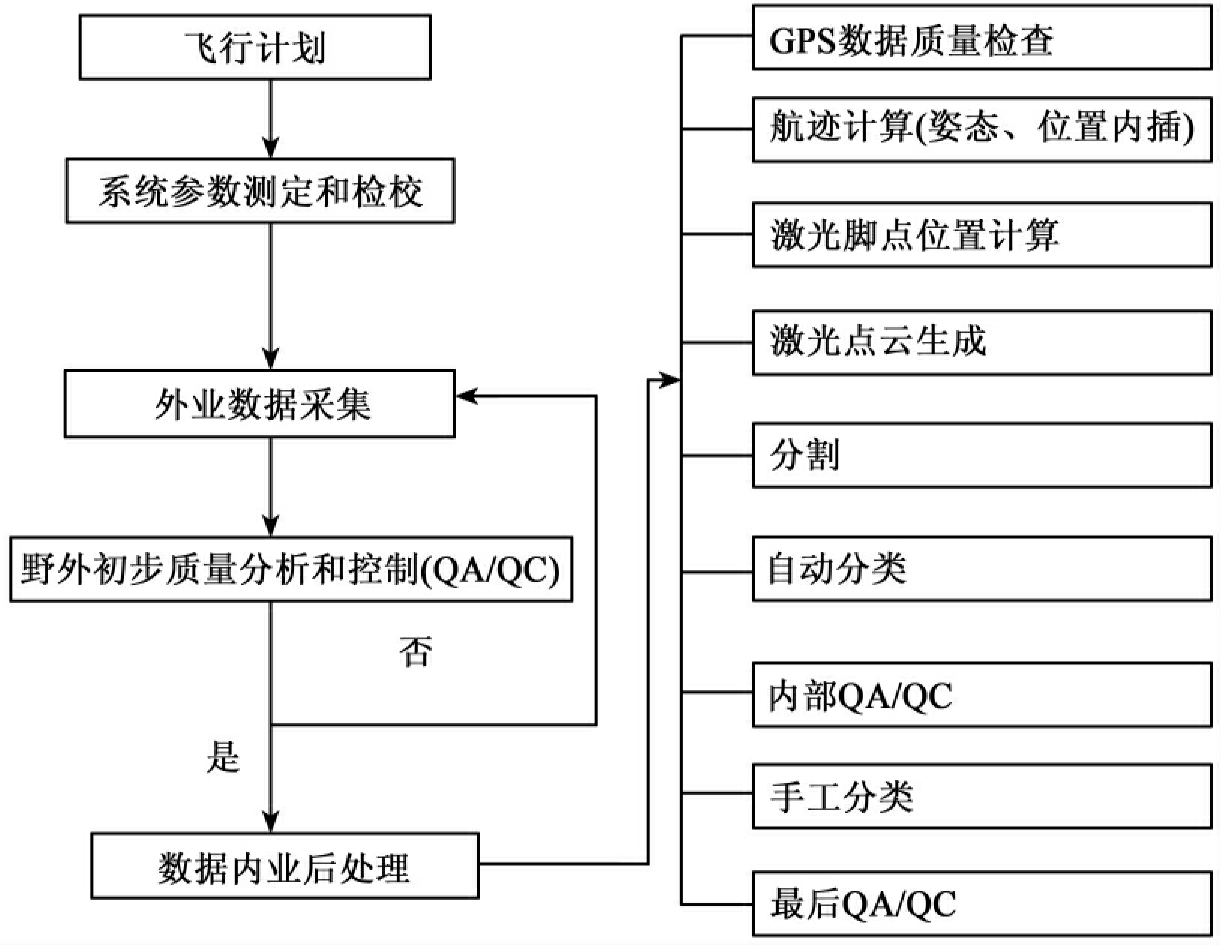
图2-6 机载激光雷达测量工作流程
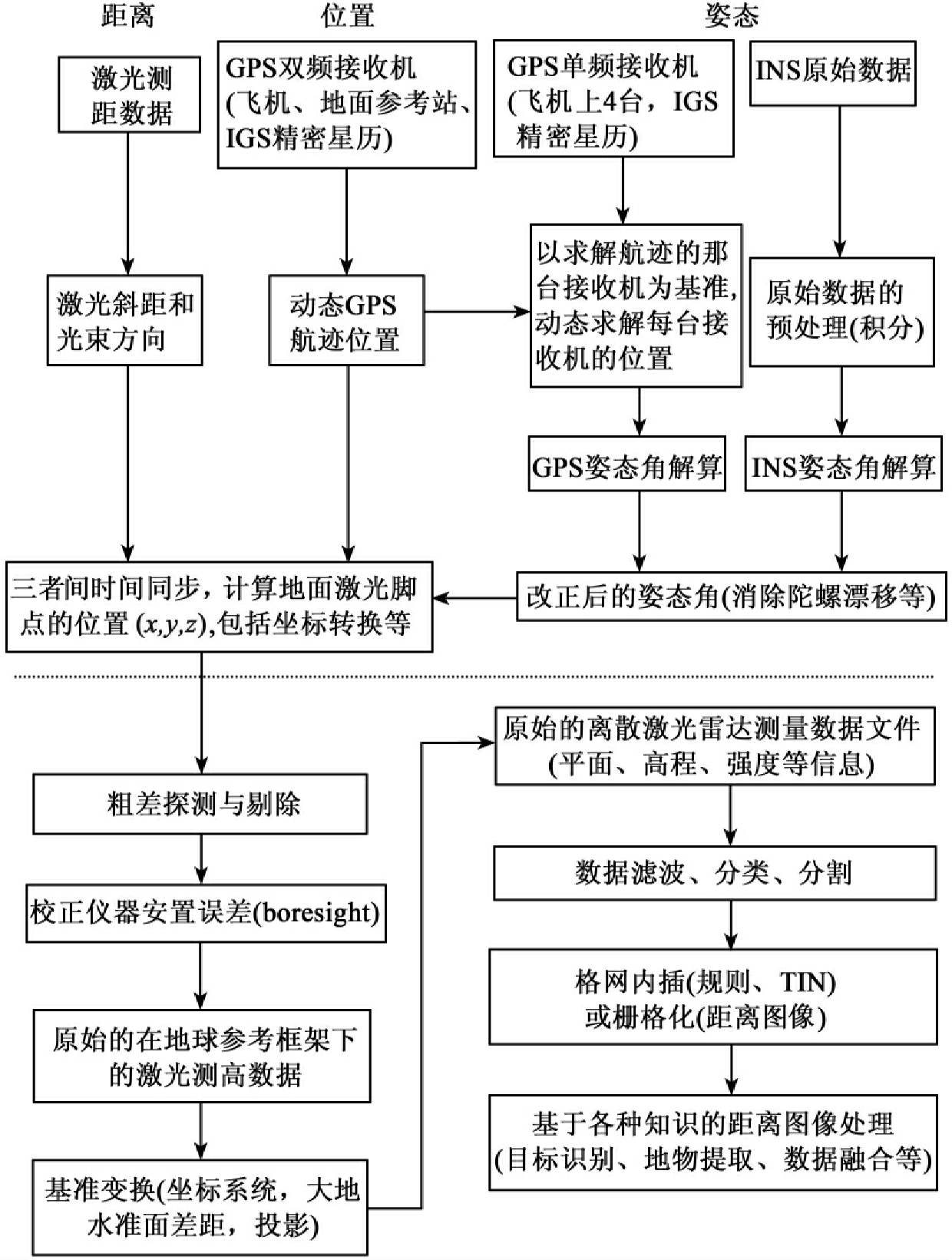
图2-7 机载激光雷达测量数据处理流程图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。









