



1.算法框架
伊藤过程主要是针对一个粒子的运动规律而言的,为了将伊藤过程映射为能求解优化问题的算法,模仿其他的群智能算法,比如遗传算法、蚁群算法、粒子群算法、免疫算法等,设计的伊藤算法同样是基于种群的算法,其框架如下。
Step1:初始化,采用某种策略初始化N0个粒子的种群,并设置算法的相关参数。
Step2:评估种群中的粒子,并采用有关策略选取种群中若干个个体作为漂移算子的吸引点(或者叫吸引元、吸引子)。
Step3:每个粒子按照设定漂移算子和波动算子运动到新的位置,即计算每个粒子的漂移增量和波动增量,两者共同决定更新粒子的运动,从而更新粒子的位置;假设波动的增量为w(t)、漂移增量为m(t),粒子当前位置为x(t),则粒子下一刻的位置为
![]()
其中γ1,γ2为漂移和波动的权向量因子。
Step4:是否满足停机条件,若是则退出,否则转Step2。
2.漂移算子的设计
漂移算子由两部分构成:一个是漂移的方向a;一个是漂移的距离,即漂移的系数(或增量)α。下面针对n维空间Rn中极小化问题详细讨论二者的确定方法。
下面的定义主要考虑如下的函数优化模型:
minf(x)
s.t.x∈Rn
定义4.3 映射M:Rn×Rn×R+→Rn,Ax1,x0,其中x1称为原始空间点、x0称为吸引子,假设x1按照上述的方法确定的半径为r1,参数T∈R+,满足以下条件:
(5)如果r1=0,则α=0;
(6)如果T=0,则α=0。
则映射M被称为漂移算子,α被称为漂移增量(或漂移系数)。
一旦定义了漂移方向和漂移增量,粒子的漂移的新位置由下式计算:
![]()
其中,x'为粒子漂移之后的新位置,x为粒子漂移之前的位置。
根据定义4.3,对于n维空间中的连续系统优化问题,漂移的方向比较容易确定,是该粒子指向吸引子的方向,即
![]()
其中,x代表当前粒子的位置,x0代表吸引子的位置,如图4.1所示。
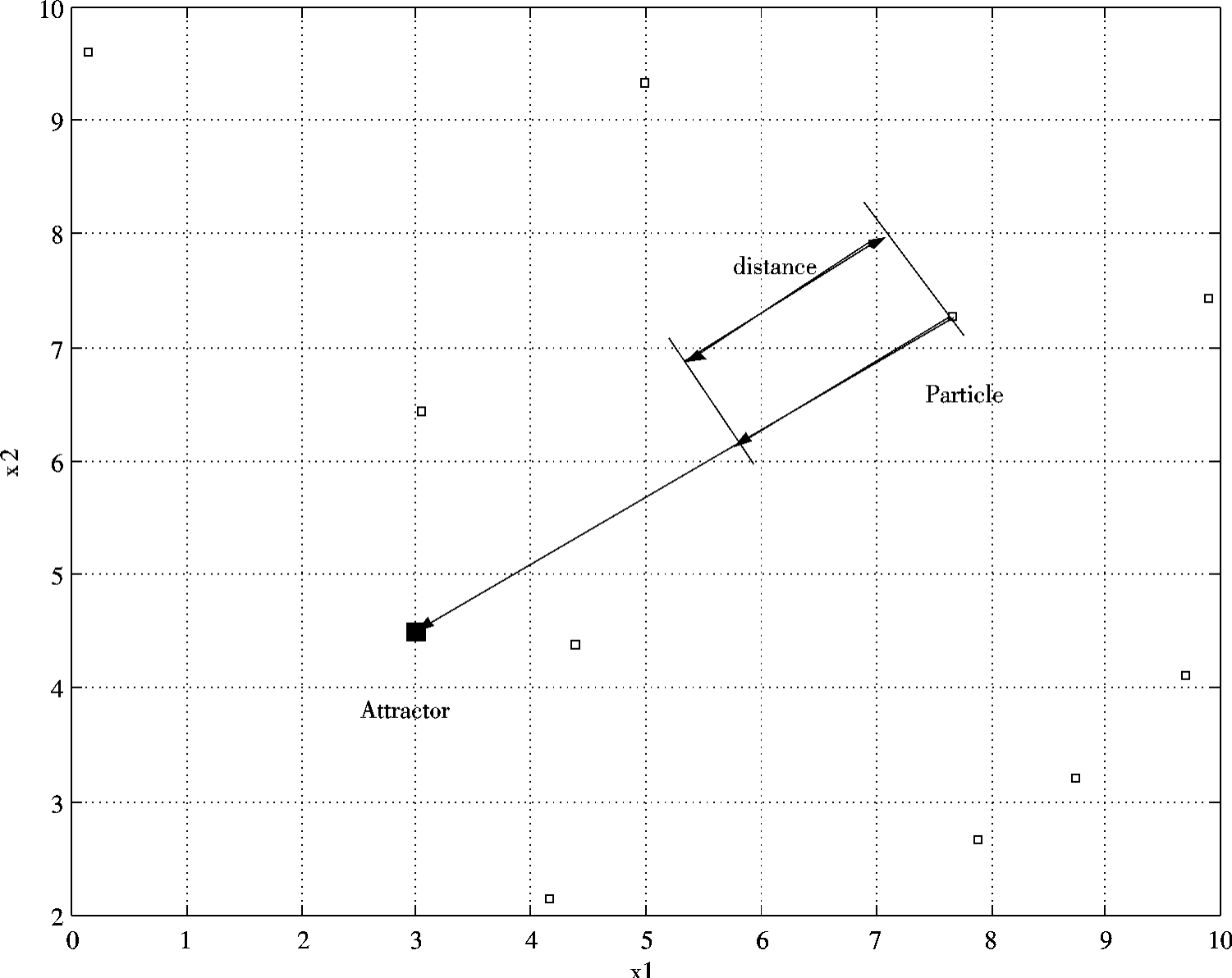
图4.1 粒子的漂移过程
3.波动算子的设计
波动函数的设计应该遵循的原则如下:
(1)波动算子是在粒子的邻域内局部的扰动,代表粒子局部的“探索”能力;
(2)由于是基于伊藤过程的随机算法,波动算子应该遵循伊藤过程中波动率的定义;
(3)波动的方向可以随机选定,取决于抽样路径;
(4)波动算子的设计应该遵循物理学原理,和漂移算子一样,应该体现出环境温度和粒子半径的影响。
伊藤算法的提出者董文勇教授指出,上述这些条件可以部分满足,但第一条一定要满足。波动算子的几何意义如下:对于给定的一个解x,波动后会移动到一个新的位置从而得到一个新的解x';在x附近的所有解中,距离x越近,被选取的可能性越大,反之,则越小。
从粒子的位置更新函数可以看出,对于当前最好的那个粒子,其漂移增量为0。因为它无须朝着当前最优解靠拢,它没有任何漂移的趋势,但其波动增量不为0。因为即使是当前最优解,也有必要在它周围进行小范围搜索,于是有可能找到更为精确的最优解。对于距离当前最优解很远的粒子,它会以一种相对较快的速度向当前最优解漂移,体现了快速优化的特性。如果粒子距离当前最优解很近或是评估值与最优解接近,那么其漂移的速度就会非常慢,这样有利于精细化搜索。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










