



5.4 城市道路的提取
目前城市道路提取方法主要针对中、低分辨率城市影像,且大多采用基于灰度形态分割的道路提取模型。针对城市高分辨率遥感影像,提取道路等线状地物的特征难度很大,主要表现在:在高分辨率遥感影像上道路有一定的宽度、噪声变大(车辆、行车线、树木)、遮挡严重、道路与路边背景材质接近等。图5-3给出一幅包含多种噪声的城市道路遥感影像。
城市主要道路一般采用基于结构信息的候选道路段提取方法,提取线特征分两步:首先提取反映灰度变化的基本单元——边缘,其次再将这些边缘连接为有意义的线特征。通常将前者称为边缘检测,后者称为边缘连接或边缘跟踪。基于Canny算子的道路提取流程如图5-4所示。针对图5-5所示的包含城市道路的遥感影像,采用如图5-4所示的流程可得到如图5-6所示的检测结果,进一步交互提取出如图5-7所示的城市道路。
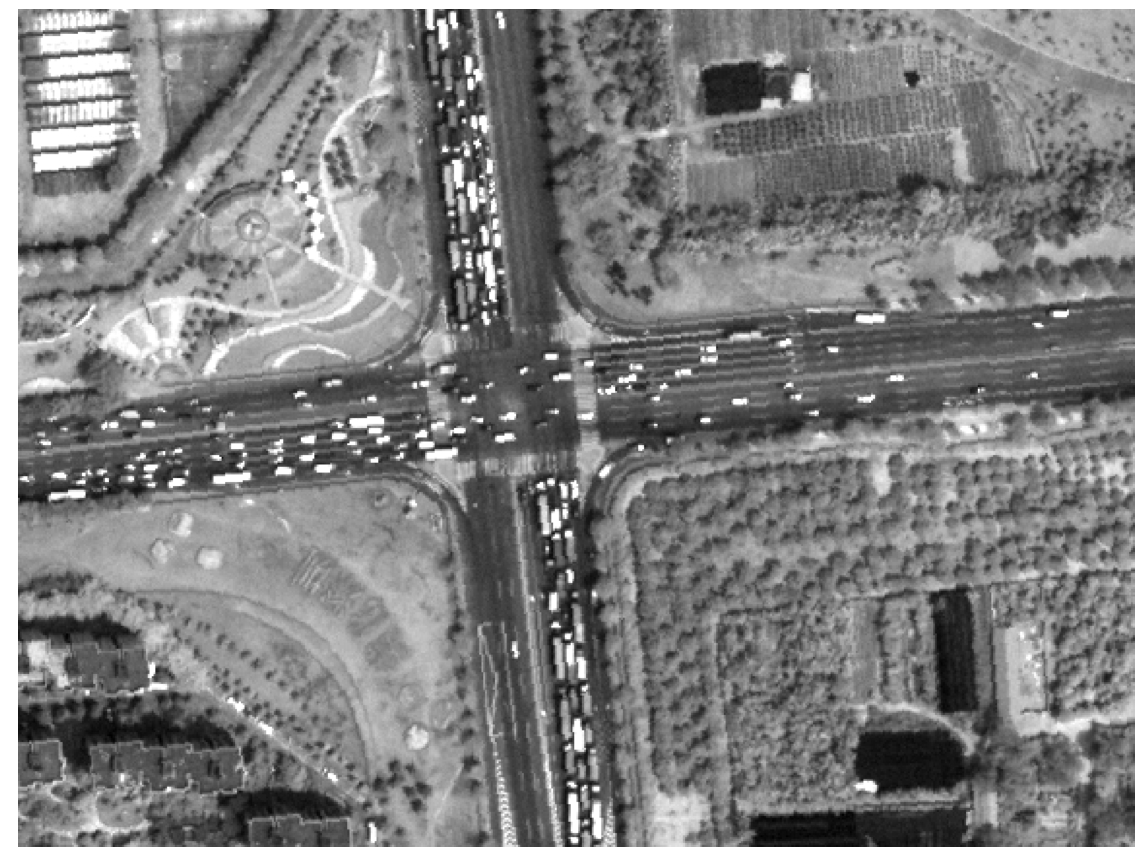
图5-3 包含多种噪声的城市道路遥感影像
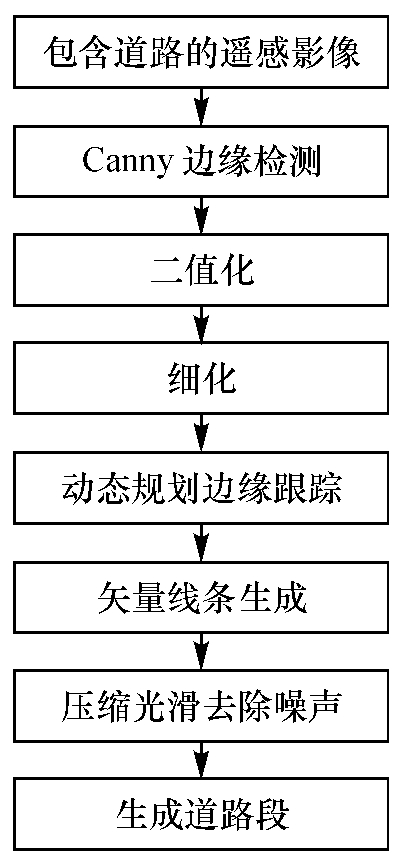
图5-4 基于结构信息的城市道路提取流程图

图5-5 城市道路遥感影像
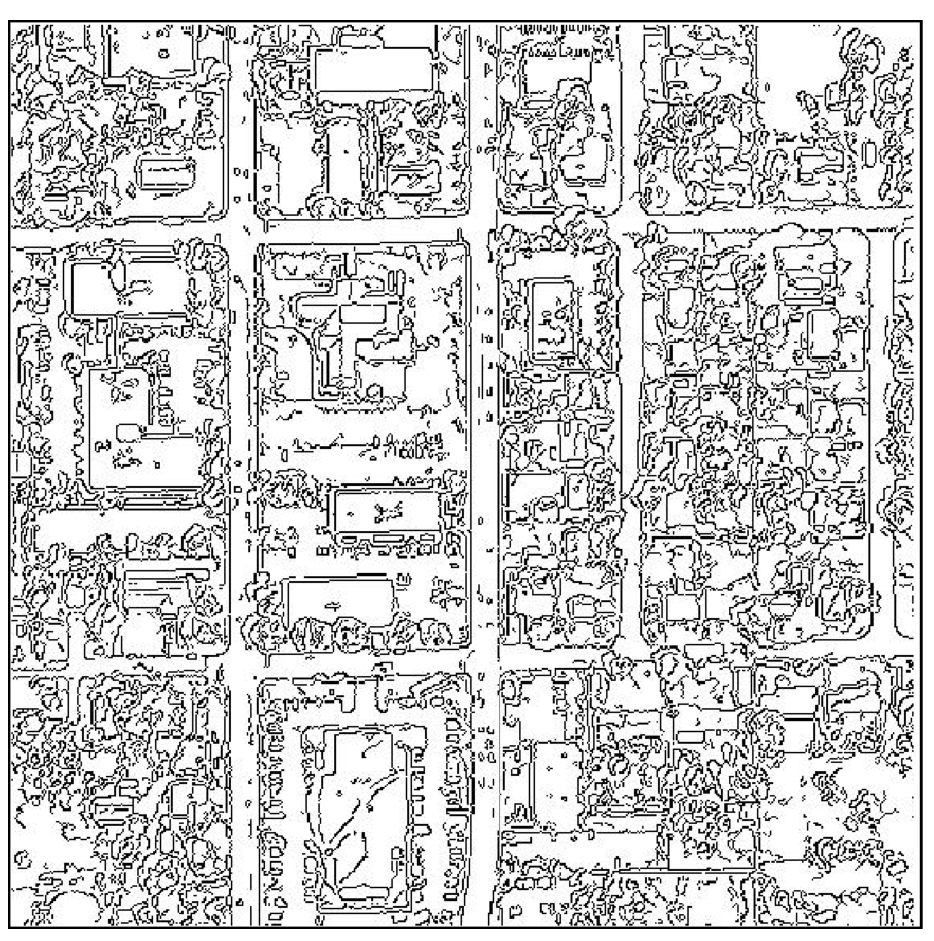
图5-6 道路影像边缘检测结果
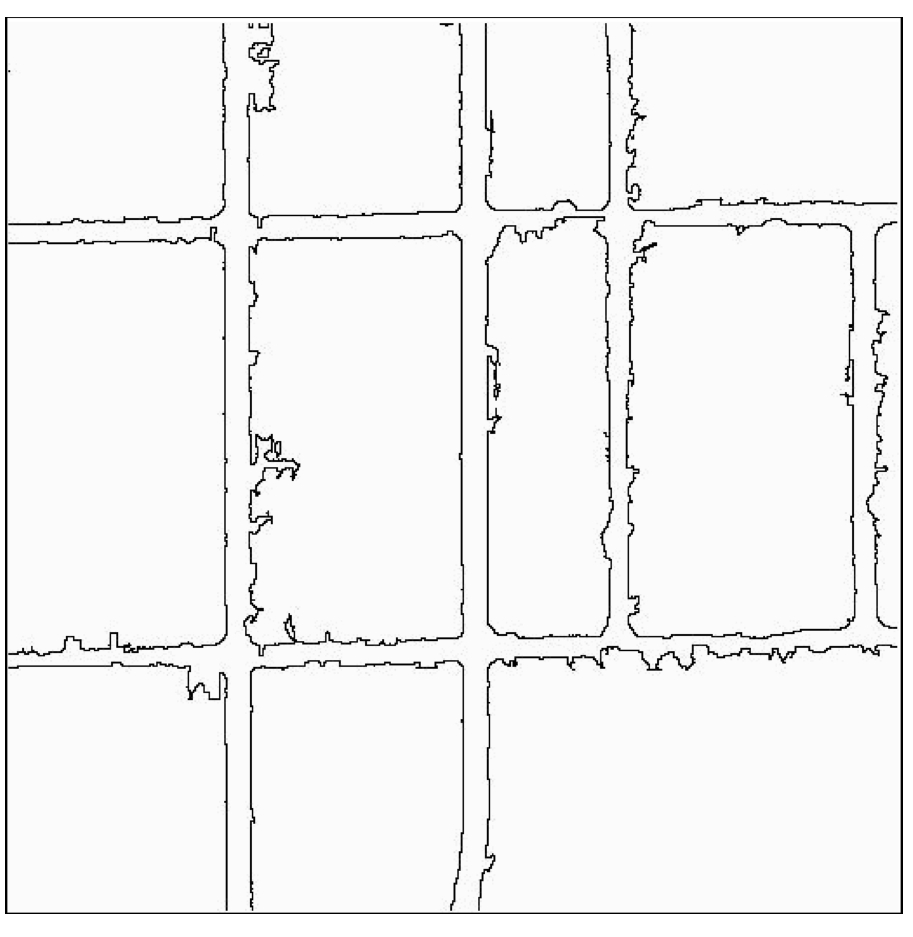
图5-7 提取出的道路矢量
对道路特征信息明显的影像,基于结构信息的候选道路段提取方法才能获得较好的提取效果。对道路特征信息不明显的影像,则需要采用如图5-8所示的多种引导方式,进行交互式提取。
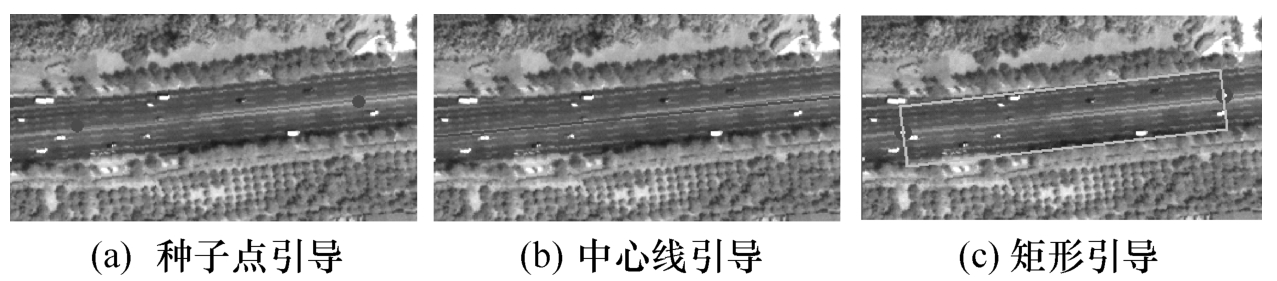
图5-8 道路提取中的引导方式
例如,对图5-9的弯曲道路,采用如图5-8(a)所示的种子点引导方法,并结合一定的样条函数可实现道路段分段提取。
有时,需要输入一对“种子点”定义一个搜索范围,在这个范围内重采样一个影像段,在影像段的局部坐标系下,基于模板匹配和优化计算方法,快速地获得线特征的初始位置。为了获得线特征更好更精确的形状描述,将影像段局部坐标系下的形状限定为一条抛物线,且每段之间抛物线是连续的。在以离散点拟合出初始点抛物线以后,可采用自适应的最小二乘模板匹配求取其精确值。

图5-9 采用种子点和样条函数相结合实现弯曲道路分段提取
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。












