



8.1.2 车载移动测量系统关键技术
集成了多种传感器的车载移动测量系统主要目标是快速地获取数据、地物测量和属性采集。车载移动测量系统是基于以下技术或原理来实现其功能的。
1.多传感器实时同步数据采集技术
作为一个高端的车载移动测量系统,系统包含有更多类型数据源(多传感器),具体包括:GPS数据、INS数据、倾斜仪数据、ODO数据、RS数据(立体影像系列数据)、GIS数据、3CCD视频数据及激光雷达数据,等等。
不同传感器类型,具有不同来源的数据,具有不同的数据特性。若要把整个系统同步起来,提供不同数据源的每帧数据的时间标签,并且整个时间标签要统一在一个时间基准下面,必须系统设计时间同步方案:把绝对的时间基准引入相对系统;设计一个相对时间系统,给没有时间功能的设备提供每帧数据的时间标签;数据采集时,一并采集每帧数据产生的时刻。
基于GPS同步控制单元功能,整个系统数据同步采集控制流程如图8-1-1所示。
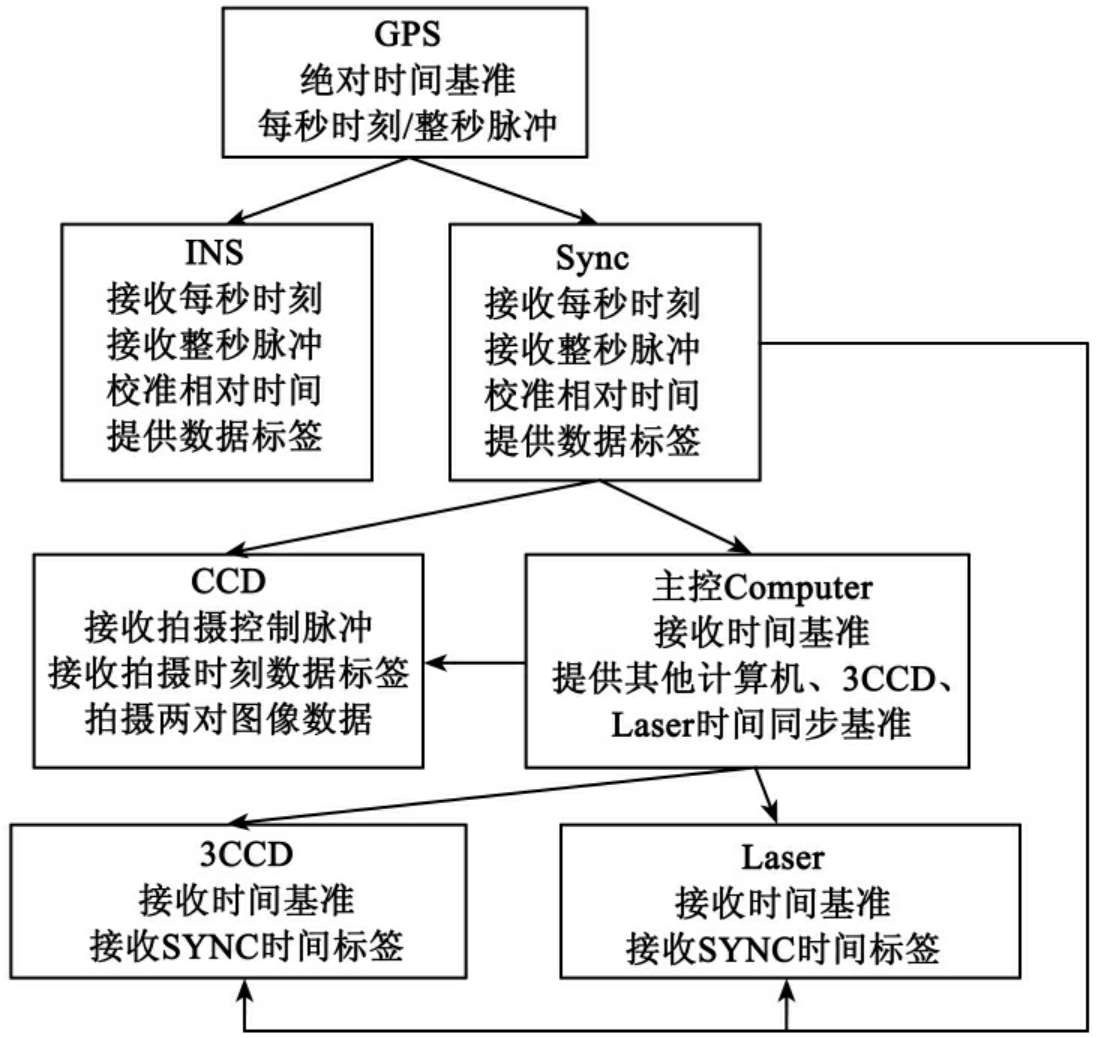
图8-1-1 数据同步采集控制原理
根据上面的分析,设计系统GPS同步控制单元。该GPS同步控制单元在授时型GPS锁定一定数目卫星后,从高精度授时型GPS中获取基准时间,并由同步器内部的高稳晶体振荡器维持时间的准确性。由里程计驱动的数据采集信号到达同步器CPU后,同步器一方面向对应设备发送采集控制脉冲,同时发送准确的时间标签到计算机,让计算机同步记录传感器数据。
2.多传感器系统整体标定
多传感器集成的车载测量系统的标定包括相对标定和绝对标定两个方面。
相对标定是指各传感器内在参数的求解,以便获得该传感器或传感器组具有相对于自身安装中心的相对测量能力。例如:在基于图像传感器的车载立体摄影测量子系统中,首先需要对立体测量相机对进行标定,确定相机本身的内部参数(相机主点Xc,Yc;相机等效焦距fx,fy,以及相机镜头的畸变模型和参数k1,k2,k3,p1,p2,p3等)及两两相机之间的相对位置(用XS,YS,ZS及φi,ω,κ表示)。
与传统的摄影测量传感器相比,考虑到系统设备的成本,系统往往采用工业的非测量图像传感器作为图像获取设备。所以图像传感器的本身的参数(内方位)未知,像面及像元尺寸未知,摄影镜头有非常大的畸变,因此在标定方法上采用经典的后方交会方法的同时,必须使用光学和数字运算的方法,确定图像传感器的一些参数及镜头的畸变。实践表明,普通镜头的畸变必须采用复杂的数学模型来描述,否则会产生很大的测量误差,其中包括径向畸变采用高达5次方的描述,切向畸变及薄透镜的畸变也必须考虑。
绝对标定是指各传感器与绝对位置姿态传感器之间的相对关系求解。基于图像传感器的车载立体摄影测量子系统和激光扫描仪子系统都需要完成类似的绝对标定。绝对标定需要借助室外标定场来实现,室外标定场相对室内标定场而言,不需要太多个数的控制点。但每个控制点都必须带有大地坐标。
通过车载立体摄影测量子系统和激光扫描仪子系统对这些室外标志点的成像测量所得的相对坐标系中的坐标(Pcamera)、GPS/INS当时记录的大地坐标位置(TXGPS,YGPS,ZGPS)和姿态信息(Roll、Pitch、Heding)以及室外标志点的大地坐标(PWGS84),根据下面的转换关系解算绝对测量参数:
Plocal=(R-Roll×(R-Pitch×(R90-Heading×(PWGS84-TXGPS,YGPS,ZGPS))))
Pcamera=RPlocal+T
通过车载立体摄影测量子系统或激光扫描仪子系统的测量坐标(Pcamera)以及转换后的局部坐标根据上面公式,解算出未知参数R和T。
对于激光扫描子系统而言,主要是根据上面获得的结果,求出每一个TOF模式的激光扫描中心相对IMU中心的偏移以及相对于IMU坐标轴的3个角度。
3.DGPS/INS组合定位和定姿
在更高精度的车载道路测量系统中,仅仅使用GPS来作为定位传感器是远远不够的。
一方面,当GPS接收机的视距范围内至少有4颗卫星时,GPS能获得良好的定位效果。然而,在GPS定位精确度至关重要的市区环境中,天空可见视野经常被遮挡,加上高层建筑反射GPS信号,造成严重的多径效应,结果使GPS定位质量恶化。从而造成GPS的定位失效或信号缺失。
另一方面,GPS一般只能提供每秒一次的定位数据,对高速车载移动测量来说,测量车可能在一秒内移动了10~20m的距离,并且经过了几次姿态的变化。
因此必须采用其他传感器弥补GPS定位和定姿的不足。而GPS/INS/ODO组合系统正好能够解决这个问题。
假设车辆进入了一段隧道,由于GPS在隧道内的信号缺失,因此在这段路程中不能形成有效定位数据。里程表(ODO)和陀螺仪的辅助下,可以在车辆进入隧道后,根据里程脉冲监测到的距离信息和陀螺仪获得的行驶方向信息,推算得出车辆在隧道内的行驶轨迹。
4.基于共线条件方程式的像片解析处理方法
立体像对解析处理方法,即根据我们设定的相机模型,在经过标定得到相机参数之后,利用立体成像原理,通过一定的算法计算出空间点的三维坐标的过程。只有通过坐标重建,才能从二维图像中恢复三维的立体信息。坐标重建是相机标定的逆过程。
在双目测量系统中,两台摄像机按其姿态的不同可分为平行光轴型和交向姿态模型。在平行光轴情况下,左右两个摄像机的各个坐标轴需精确地平行,只是它们的原点位置不同。在这种情况下,系统的标定和坐标重建都比较简单,但实际应用中却很难实现,有时可以在高精度的坐标量测机上,通过移动一个相机来模拟双目相机的测量,在这种情况下可以看着是平行光轴型的。然而在该模型下,双目相机的重叠区域小,有效测量范围小。因此,在实际运用中,为了扩大测量范围,有效地利用相机的视场,经常布置为交向姿态模型。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










