



4.网络计划的分类
为了适应不同项目(或任务)、功能、用途的需要,目前国内外出现了不同类型的网络计划。仅单代号搭接网络计划就有主要流行于英、美等国的“前导网络计划(PD)”;首创于法国,流行于西欧的“梅特拉(Matra)位差法网络计划(MPM)”;主要流行于德国的“组合网络计划(BKN)”、“汉堡网络计划(HMN)”等。双代号搭接网络计划,有主要流行于苏联的“综合网络计划”等。在国内通常仅涉及对接无时限约束的最简单的双代号网络计划。
4.1按表达形式分类
(1)双代号网络计划
双代号网络计划是一种以箭线表示工作,以节点(圆圈)表示前后工作的连接点的网络计划。由于这种网络计划是以箭杆表示工作的,故又称为箭杆式网络计划。
(2)单代号网络计划
单代号网络计划是一种以节点表示工作或事件,以箭线表示逻辑关系的网络计划。由于这种网络计划是用节点表示工作的,故又称为节点式网络计划。
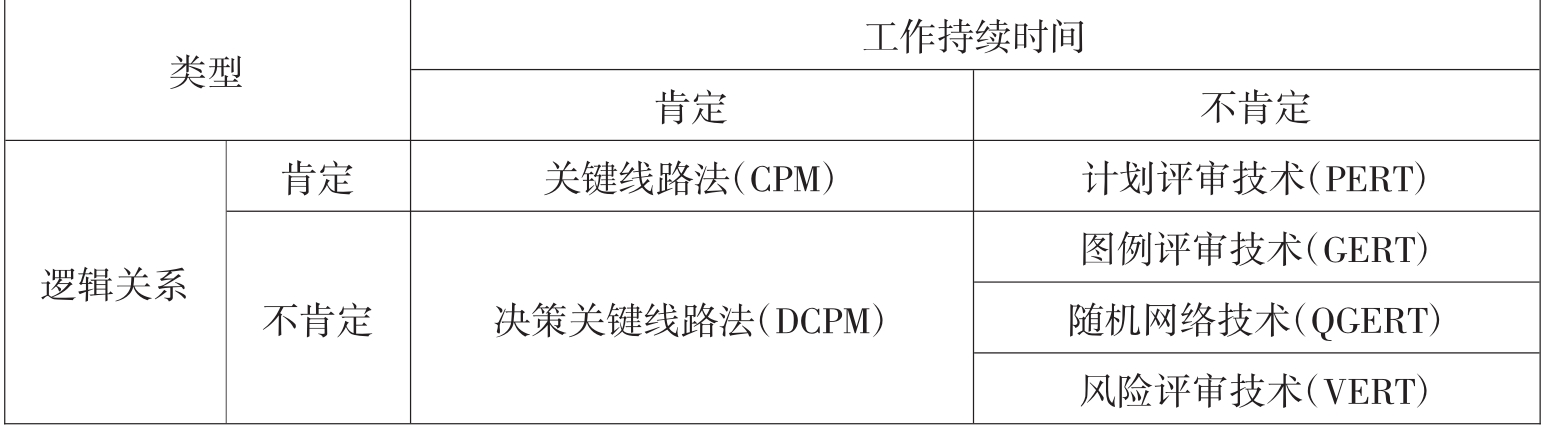
4.2按逻辑关系和工作持续时间分类
按逻辑关系及持续时间是否肯定可将现有的各种网络计划分为两种类型。
(1)肯定型网络计划
这种网络计划的特点是:工作间的逻辑关系是肯定的,各项工作持续时间也是肯定的。常用的“关键线路法”(CPM),就属于这种类型。这种类型网络计划,还可按不同形式进行划分。
按逻辑关系分为:对接网络计划,即紧前工作的结束与本工作开始之间的时间间隔,或本工作结束与紧后工作开始之间的时间间隔全为零的网络计划;搭接网络计划,即用开始到开始、开始到结束、结束到开始、结束到结束等顺序关系的时距来表明紧邻工作之间逻辑关系的网络计划。实际上对接网络计划仅是搭接网络计划中紧前工作的结束到本工作的开始之间的时间间隔全为零的一种特例。
按搭接的时距分为:单时距搭接网络计划,即一般搭接网络计划;双时距搭接网络计划,即用开始到开始、开始到结束、结束到开始、结束到结束等顺序关系的最小时距和最大时距,来表明紧邻工作之间关系的网络计划。法国的梅特拉网络计划,就是其中的一种。
按有无时限分为:无时限网络计划,有时限网络计划以及具有最早开始时限、最迟结束时限的双时限网络计划。
按时间表示法分为:无时间坐标网络计划;带时间坐标网络计划,即用箭线在横轴上的水平投影长度表示工作进度的网络计划,亦称为日历网络计划或时标网络计划。
(2)非肯定型网络计划
非肯定型网络计划的特点是:各项工作的持续时间不确定,或者紧邻工作间的逻辑关系不明确。一般来说,非肯定型网络计划是更常见的,特别是一些复杂的项目或者是本单位从未做过的工程,以及某些科研项目,大多属于这种类型。由于它采用了概率统计等数学理论,所得数值切合实际,从而提高了网络计划的准确性。但计算较复杂,可用电算解决。
非肯定型网络计划又可以分成以下几类:
①逻辑关系是肯定的,但工作持续时间是非肯定的。
常用的“计划评审技术”(PERT)就属于这种类型。PERT网络计划中工作的持续时间不确定,为概率型,逻辑关系肯定不变,条件改变时,可预测实现的概率。
另外近几年产生并迅速发展起来的不确定性网络计划技术(如模糊网络计划技术、灰色网络计划技术等)也属于此种类型。
②逻辑关系是非肯定的,而工作持续时间是肯定的。“决策网络技术”属于此种类型。
③逻辑关系是非肯定的,工作的持续时间也是非肯定的。
“图例评审技术(GERT)”就属于这种类型。网络计划中各项工作的持续时间不确定,为随机型,逻辑关系不一定完全实现。
表6.2 网络计划技术的类型
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











