



9.2 基于多目标空间方位关系的城市遥感影像检索
多个目标间的空间方位关系是影响遥感影像检索性能的一个重要因素,也是目前遥感影像检索系统亟待解决的一个难题。对于多目标的空间方位关系,有多种表达方法,比如力直方图、属性关系图、空间关系直方图等。
1.力直方图建模
力直方图(force histogram)是一种两个目标间空间方位关系描述手段,具有准确地反映出两目标形状、朝向、大小以及距离的变化的能力。如图9-6所示,E表示一个物体或者目标,Δα(v)为一条方向线,其中α为方向线与参考方向i的夹角,方向线与物体E相交的部分E∩Δα(v)记做Eα(v)。
一条方向线在通过两个目标时,会分别与两个目标相交,产生两个线段的集合Aθ(v)和Bθ(v)。那么沿着这一条方向线,两个目标间力的作用就是这两个集合中线段间力的合成。对任意角度θ做一组平行线,计算每条平行线上两目标的引力,求和便得到一个力的量值。引力由式(9-13)、式(9-14)算出。对θ∈(0,2π)的每一个角度重复上述运算,再利用式(9-15)就得到两目标的力直方图φAB(θ)。
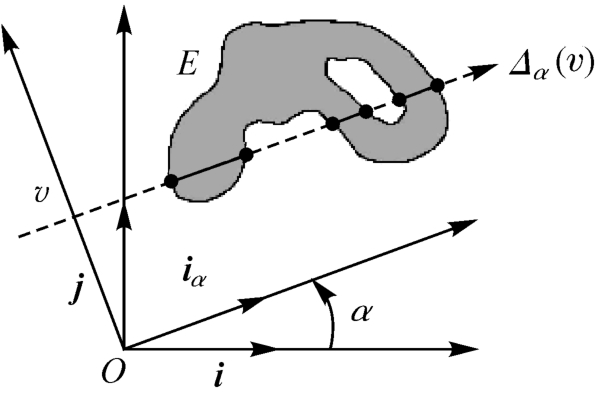
图9-6 方向线示意图



2.力直方图的旋转和缩放不变性
当目标群发生旋转或者缩放变换时,力直方图的变化分别表现为平移变化和幅值变化。为了解决旋转不变问题,Scott G等人提出的基本思想是:如果能找到一个参考物体,使得这个参考物体与多目标间的相对位置不变,即参考物体随着目标的旋转而旋转,随着目标的平移而平移,那么通过计算参考物体与每个目标力直方图来描述这组目标的空间关系,即可解决直方图旋转后平移的问题。为了解决缩放不变问题,Scott G等人提出的基本思想是,首先计算参考物体与图中目标群的力直方图,并用其表示这组目标的空间关系。分别以参考物体A、B为顶点,将目标分成M个区域(如图9-7所示,其中M=20),每8°为一个区域,对于每个区域i(i=1,2,…,M),求参考物体与目标间的力直方图,计算其力的均值W{i},代表第i个区域对力的贡献。令
S{i}=max{WA{i},WB{i}} (9-16)
S{i+M}=min{WA{i},WB{i}} (9-17)
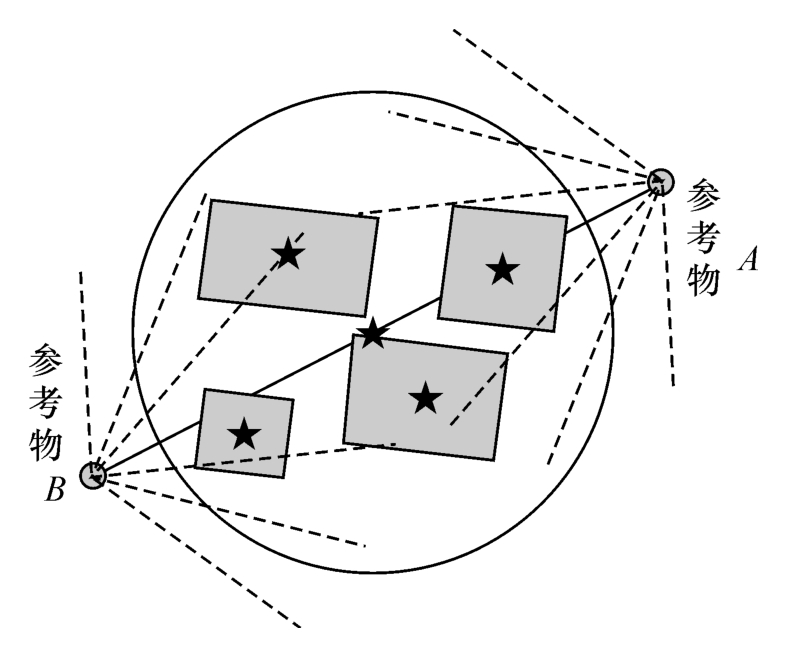
图9-7 多目标间空间方位关系的确定
最后,对S进行归一化处理,即可以达到缩放不变性。归一化后的向量S便描述了多目标的空间关系,这样就完成了多目标空间关系的建模。
3.两组目标群之间的相似性度量
两组目标的匹配程度用相似度来表示,即两组目标各自的空间关系S的相似度。式(9-18)给出了求出两组目标间的相似度d(d∈[0,1])的公式,其中,S1[i],S2[i]的基本算法参见式(9-16)和式(9-17),M表示每个参考物体将图像分成的区域数。

4.基于多目标群空间方位关系的城市遥感影像检索流程及检索结果
图9-8给出基于多目标空间方位关系的遥感影像检索算法流程。采用某城市全色QuickBird卫星影像(空间分辨率为0.61 m)为实验数据,对算法流程进行了验证,从中截取多组人工目标,每组目标都包含了2个以上的目标且目标种类不同,包括简单房屋、船只以及汽车(停车场),如图9-9所示。对图9-9所示的原始多目标进行多种尺度的缩放和多角度的旋转变换,构建目标影像库,图9-10为一次检索结果(以二值化结果表示)。其中,查询影像为图9-9中第一幅城市遥感影像逆时针旋转90°的结果。从返回的前10幅结果影像来看,原始影像及其5块变换结果均被顺利检索出来。
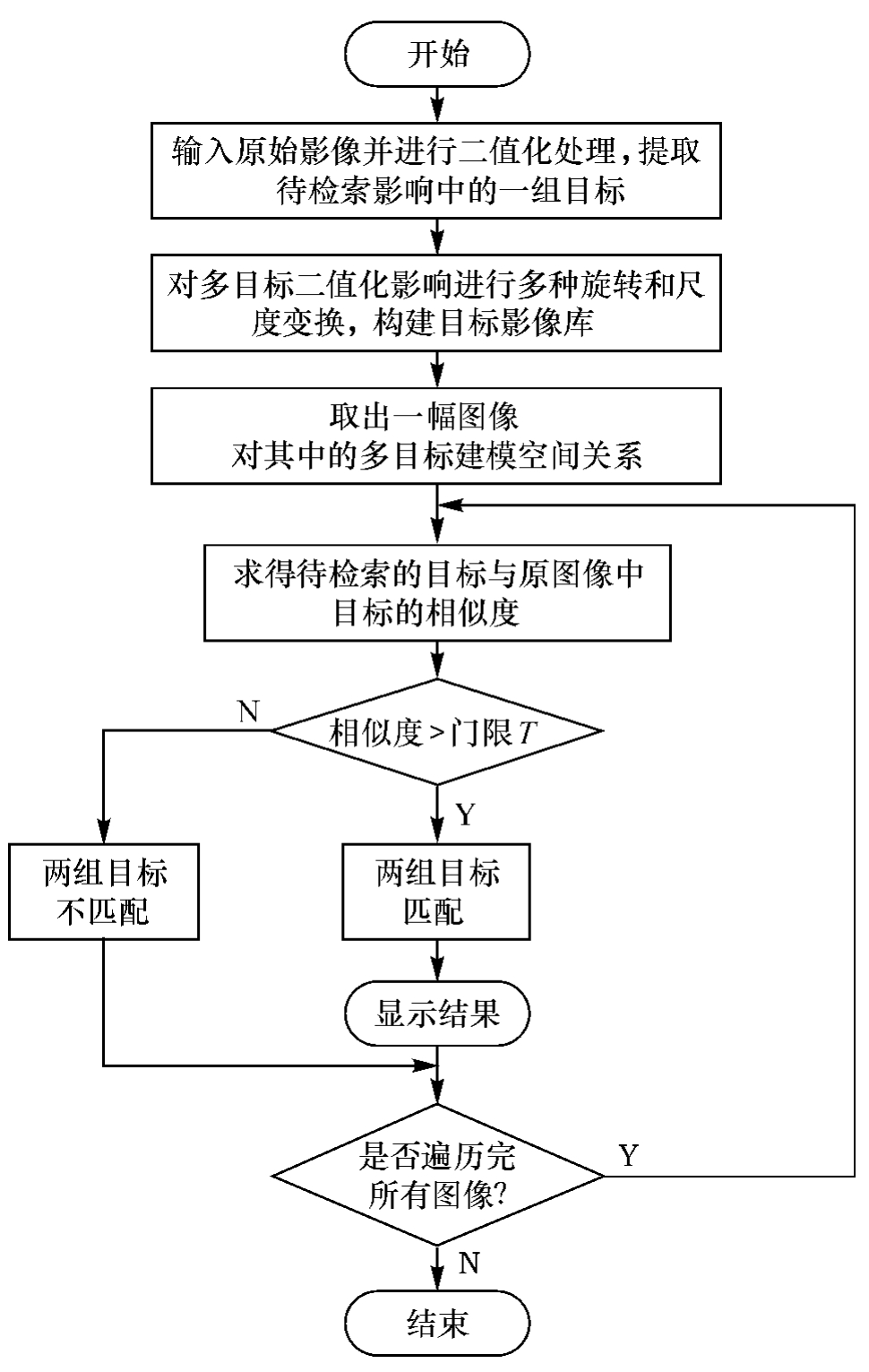
9-8 基于多目标空间方位关系的遥感影像检索算法流程图
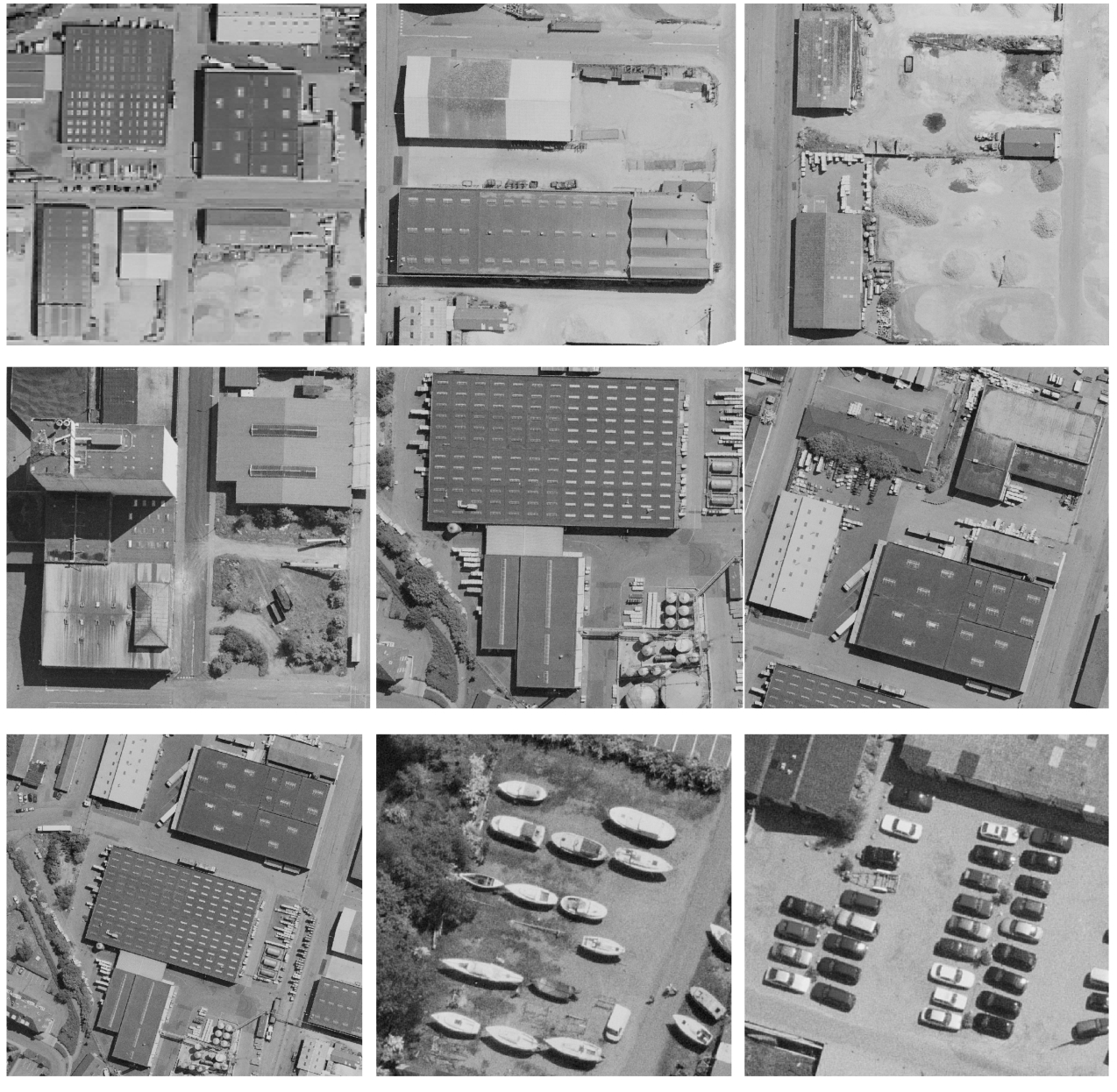
图9-9 某城市原始遥感影像
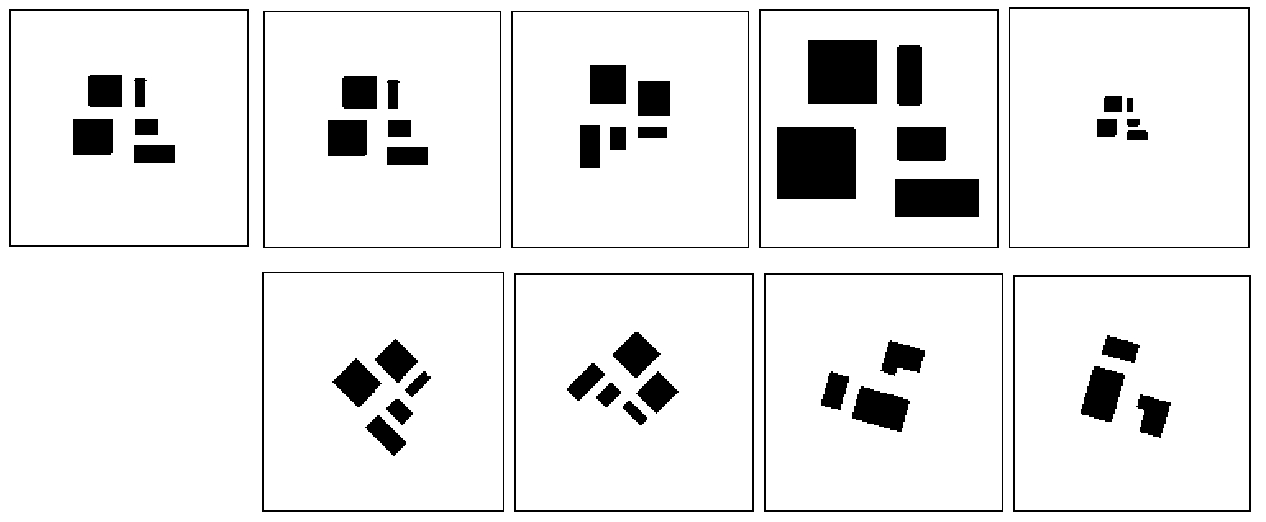
图9-10 检索结果
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











