



9.2 潮汐观测
潮汐观测通常称为水位观测,又称验潮。其目的是为了了解当地的潮汐性质,应用所获得的潮汐观测资料,来计算该地区的潮汐调和常数、平均海平面、深度基准面、潮汐预报以及提供测量不同时刻的水位改正数等,供给有关军事、交通、水产、盐业、测绘等部门使用。潮汐观测是海洋工程测量、航道测量等工作的重要组成部分。
1.水尺验潮
一种类似于用水准尺量测水位的验潮方式。水尺一般固定在码头壁、岩壁、海滩上(见图9-6)。水尺上面标有一定的刻度,一般最小刻度为厘米,长度为3~5m,利用人工方法读取水位。水尺验潮具有工作简单、机动性较强、易操作、技术含量低、造价低的特点,常用于临时验潮的情况。该方法的观测精度受涌浪、观测误差等多种因素的影响,一般误差为10~15cm。
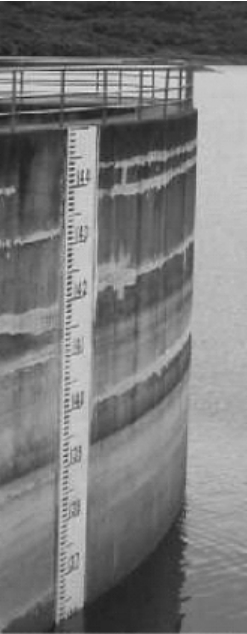
图9-6 水尺
2.井式自记验潮仪验潮
其主要结构由验潮井、浮筒、记录装置组成。
工作原理如下:通过在水面上随井内水面起伏的浮筒带动上面的记录滚筒转动,使得记录针在装有记录纸的记录滚筒上画线,来记录水面的变化情况,达到自动记录潮位的目的。目前,这种通过机械运动获得潮位的过程可以通过数字记录仪完成。井式验潮结构见图9-7,其特点是坚固耐用,滤波性能良好,其缺点是连通导管易阻塞,成本高,机动性差。
3.超声波潮汐计验潮
超声波潮汐计主要由探头、声管、计算机等部分组成(见图9-8)。其主要特点是利用声学测距原理进行非接触式潮位测量。基本工作原理是通过固定在水位计顶端的声学换能器向下发射声信号,信号遇到声管的校准孔和水面分别产生回波,同时记录发射接收的时间差,进而求得水面高度。特点是使用方便,工作量小,滤波性能良好,适用测量。
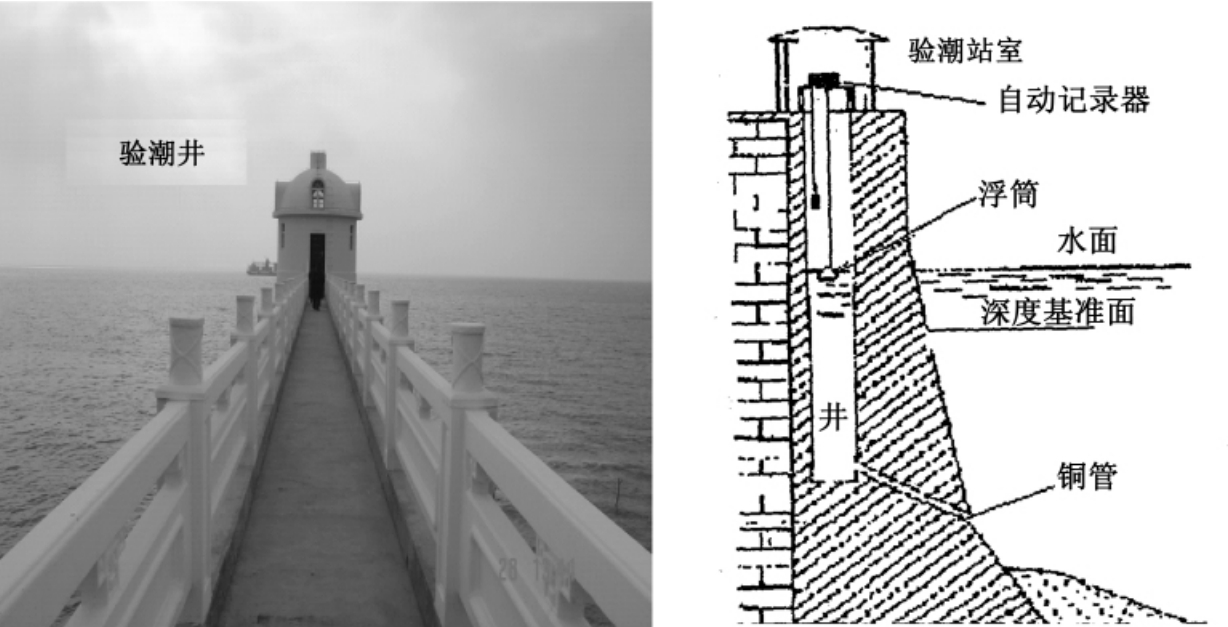
图9-7 井式验潮站
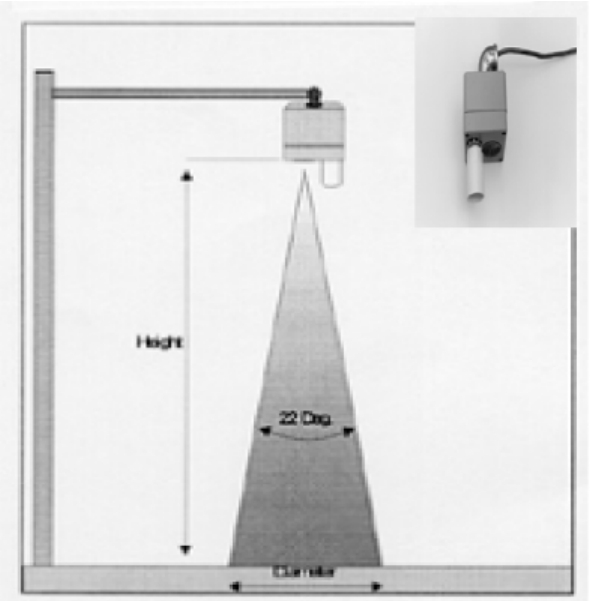
图9-8 声学水位计
声学测量中,温度的影响是产生测量偏差的主要原因,温度变化1℃,将影响声速变化约0.18%,为了在不均匀的声场进行准确测量,采集水位的同时,还要采集声程中的温度,修正声速,对水位测量值进行温度补偿,减小温度梯度造成的测量误差,提高测量精度。
4.压力式验潮仪验潮
压力式验潮仪按照结构可以分为机械式水压验潮仪和电子式水压验潮仪(见图9-9)。机械式水压验潮仪主要由水压钟、橡皮管、U形水银管和自动记录装置组成。其基本原理是通过测量水下或与海水相连系的水面以上某一界面上由于海面变化引起的压力变化来测量水位。其特点是无验潮井,坚固耐用,调整方便,成本低,滤波性能良好。
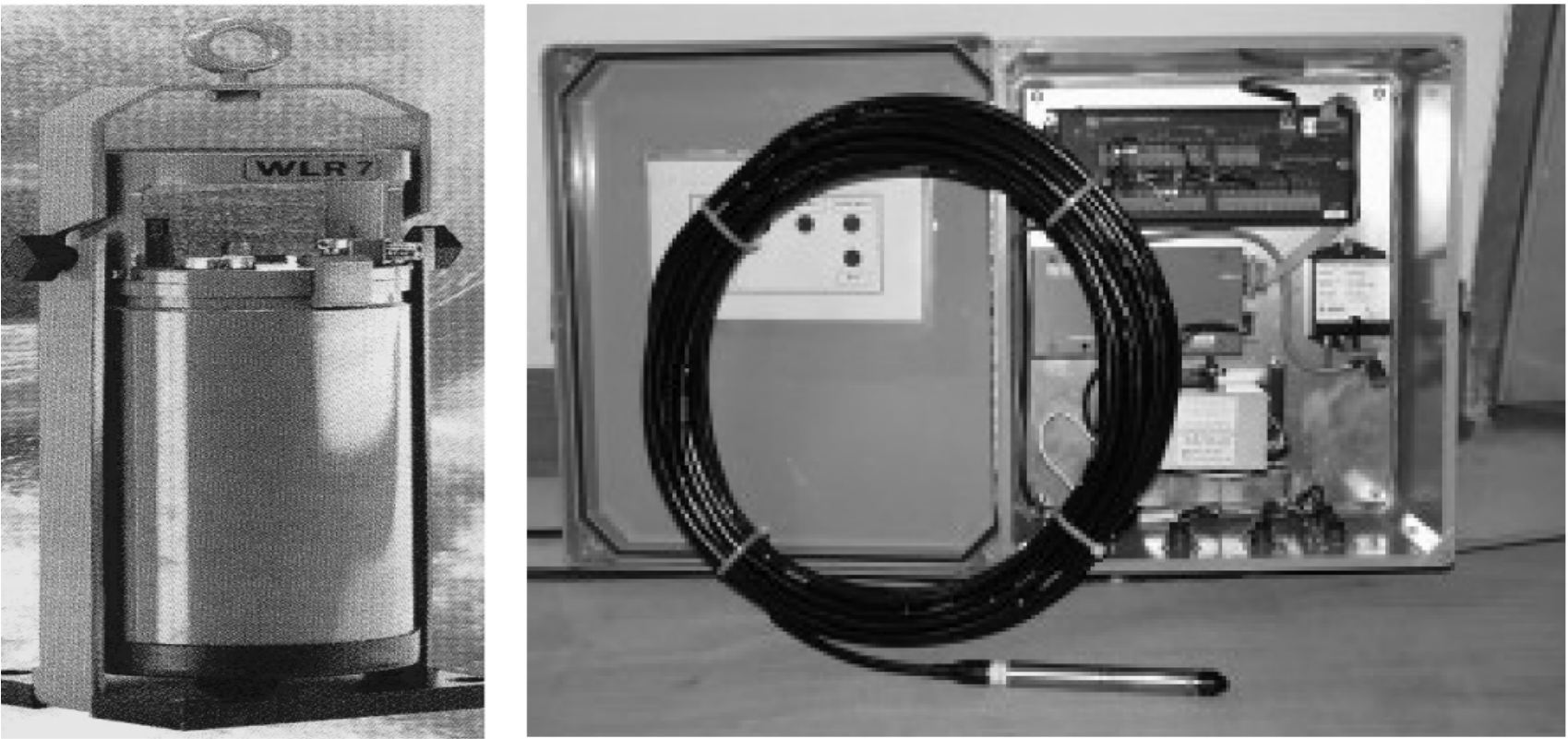
图9-9 机械式水压验潮仪和电子式水压验潮仪
电子式水压验潮仪主要由水下机、水上机、电缆、数据链等部分组成。其原理与机械式水压验潮仪基本相同,只不过其利用压力传感器代替水压钟和U形管,又利用数字电子技术将压力变化转换成水位变化,从而达到水位观测的目的。特点是安装方便,精度高,携带方便,自动化程度高,效率高,滤波性能良好,还可以进行近距离遥控。
5.GPS在航潮位测量
GPS在航潮位测量方法是最近几年兴起的潮位测量方法。
瞬时海面T s是潮汐T和波浪w综合作用的结果,可表达为:
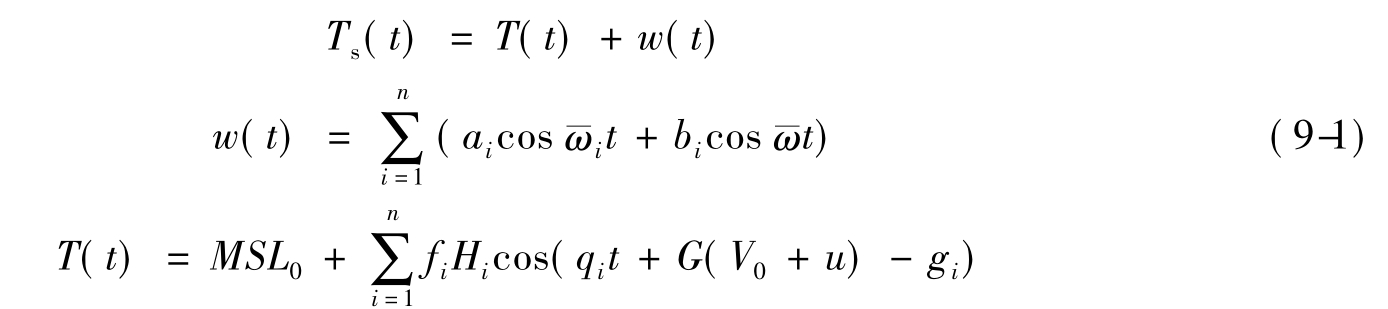
式中:各项意义同前。
由于波浪变化具有较强的地域性,近岸波浪和远岸波浪之间存在着较大差异,因此为了得到稳定的潮位面,就必须从潮位观测量中消除波浪的影响。潮位的变化具有较强的时空性,由于海洋测量海域广阔,在验潮站的有效作用距离范围内,利用验潮数据可获得较高的潮位改正精度;否则,随着距离的增加,潮位需通过外推获得,精度将会变得较差。
随着GPS载波相位差分测量技术的日益成熟,在动态情况下,它可获得厘米级甚至毫米级的平面定位精度和厘米级的高程定位精度,这为动态环境下的潮位测定奠定了理论基础。
水上GPS验潮根据其载体的不同分为船载和浮标GPS验潮,两种方法思想基本相同,即均采用GPS载波相位差分测量技术作为定位基础,利用大地高反算潮位。其区别仅在于载体。船载GPS验潮中,GPS架设在船体的中心或重心上方;浮标GPS验潮时,浮标的下方悬坠一个重物,保证浮标具有一定的吃水和稳定度,GPS天线安置在浮标内吃水面上一定高度;为了削弱多路径效应的影响,GPS天线必须带有抑径板和设置一定的高度角。
根据图9-10,基准站、流动站天线相位中心的正常高为:
![]()
当基准站和流动站间距离不是很远(30km以内)时,下式成立:
![]()
则潮位值为:
![]()
以上便是GPS验潮的基本原理。
水尺零点的高程为:
Hruler= h ro-hruler0 (9-5)
潮位表达式为:
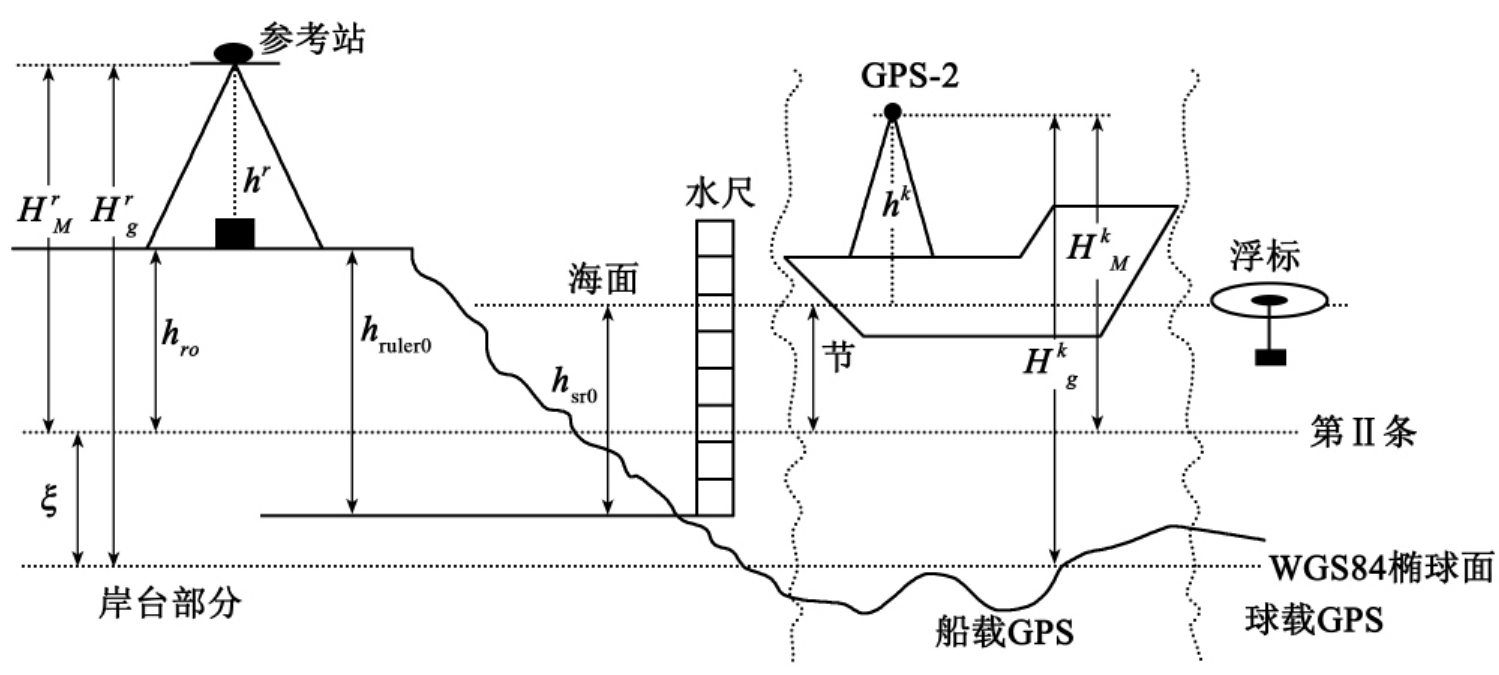
图9-10 GPS验潮原理图
Truler= H ruler+ h sr0 (9-6)
理论上应有:
TGPS= Truler (9-7)
上述验潮方法虽然很好地克服了传统验潮方法不能在水上或偏远地区进行验潮的缺陷和潮位模型误差的影响,但同传统方法一样,也存在着波浪对潮位观测数据的影响,为了消除该影响,下面介绍一种波浪滤除方法——姿态补偿和门限滤波。
波浪是引起船姿变化的一个主要因素,它可通过GPS或姿态传感器来测定。参考图9-10,船姿作用下GPS-2天线相位中心到船体吃水面的垂距发生瞬时改变,该变化量即为船姿对水位测量的补偿量,设p、r为纵摇和横摇,则船姿补偿量为:
![]()
瞬时垂距为:
![]()
船台GPS-2肩负着潮位和姿态测量的双重角色,经上式补偿后,瞬时海面高程T s为:
![]()
式中:Z2为GPS-2测量的大地高。以上瞬时海面并不代表实际潮位面T(t),还须消除涌浪w的影响,为此必须进行门限滤波。
由于波浪的涌动,船体被抬高或降低,其影响较大。根据式(9-1),潮位项为长周期项,周期一般至少大于1h;第二项为涌浪影响项,短波项,周期10~60s。两项的周期变化如图9-11和图9-12所示。对式(9-7)两边在[0,Δt]区间取积分平均,得
![]()
图9-11和图9-12说明,只要选择适当的Δt(涌浪周期),便可利用下式实现涌浪的滤除:
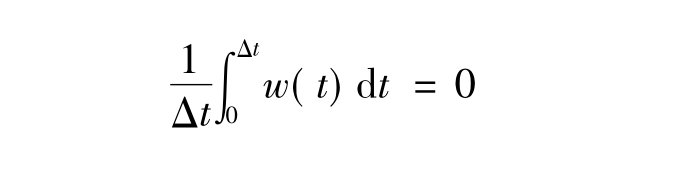
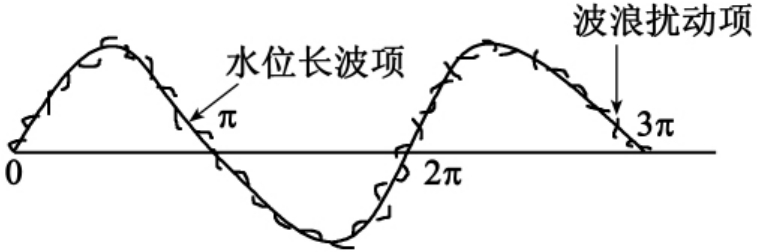
图9-11 水位周期示意图
图9-12 波浪周期示意图
![]()
Δt取值过大不但会引起波浪相位的延迟,而且还会引起潮位本身的滤波问题。但取值过小,波浪的影响将不能很好消除。为了更好地确定Δt,可采用循环尝试法,这种方法主要考虑两个方面,一是波浪的周期变化基本趋于平稳,二是短时间内潮位不发生变化。利用这种方法进行事后滤波,其涌浪滤除设计流程如图9-13所示。将确定的Δt带入式(9-11),便可确定出[0,nΔt]时间段内的潮位。
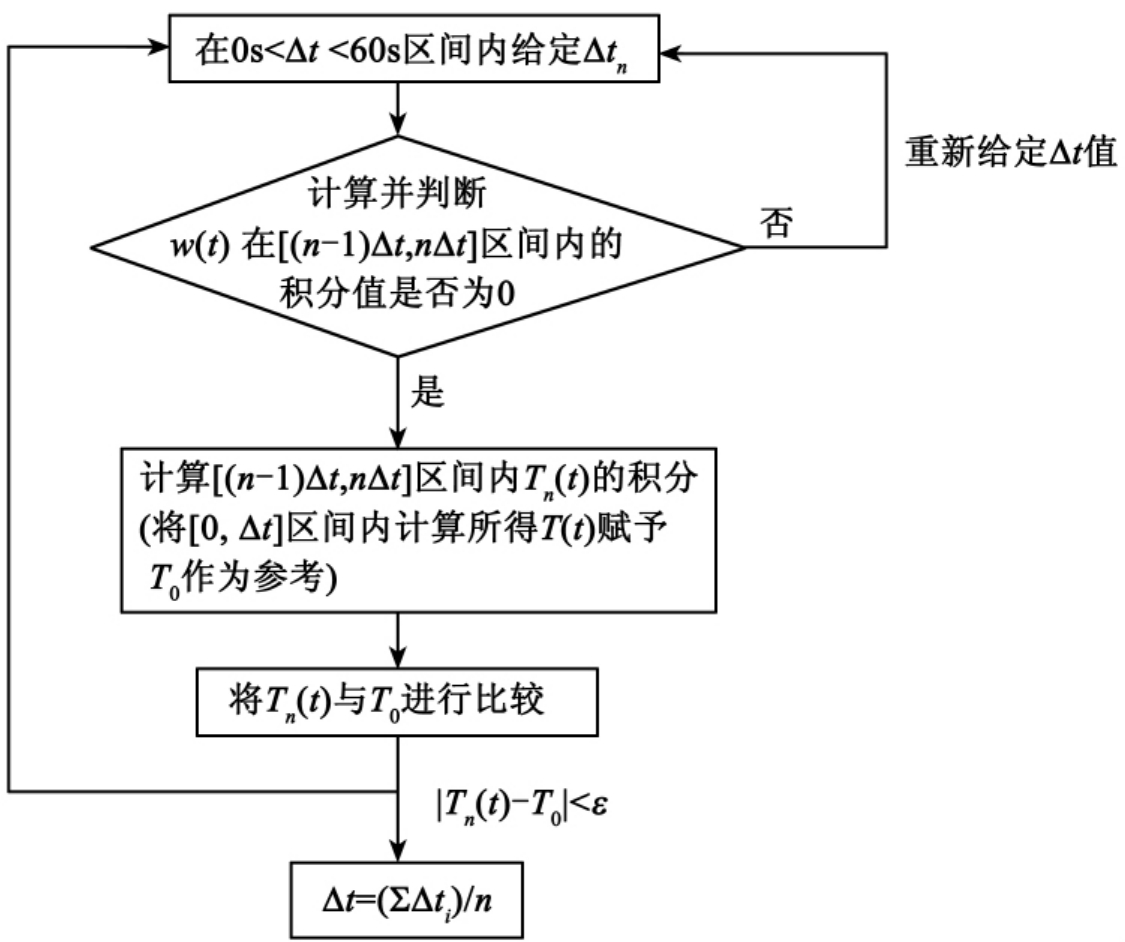
图9-13 涌浪滤除示意图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











