



3.3.1 基础理论
1.摄影机的内、外方位元素
从摄影机成像几何的观点,摄影中心到成像面的距离,称摄影机的焦距f,摄影中心到成像面的垂足O,称为像主点,SO称为摄影机的主光轴。主点离影像中心点的距离x0、y0确定了像主点在影像上的位置。f、x0、y0即为摄影机的内方位元素。摄影机的内方位元素就是摄影机的内部的方位元素,它与摄影时,摄影机的位置、姿态无关。内方位元素可以通过摄影机检校(计算机视觉中称为标定)获得,测量专用的摄影机在出厂前由工厂对摄影机进行检校,其内方位元素是已知的,故称为量测摄影机;否则,称为非量测摄影机(见图3-3-1)。
在恢复内方位元素(即恢复了摄影光束)的基础上,确定摄影光束在摄影瞬间的空间位置和姿态的参数,称为外方位元素。一张像片的外方位元素包括6个参数,其中3个是直线元素,用于描述摄影中心的空间坐标值;另外3个是角元素,用于描述像片的空间姿态。
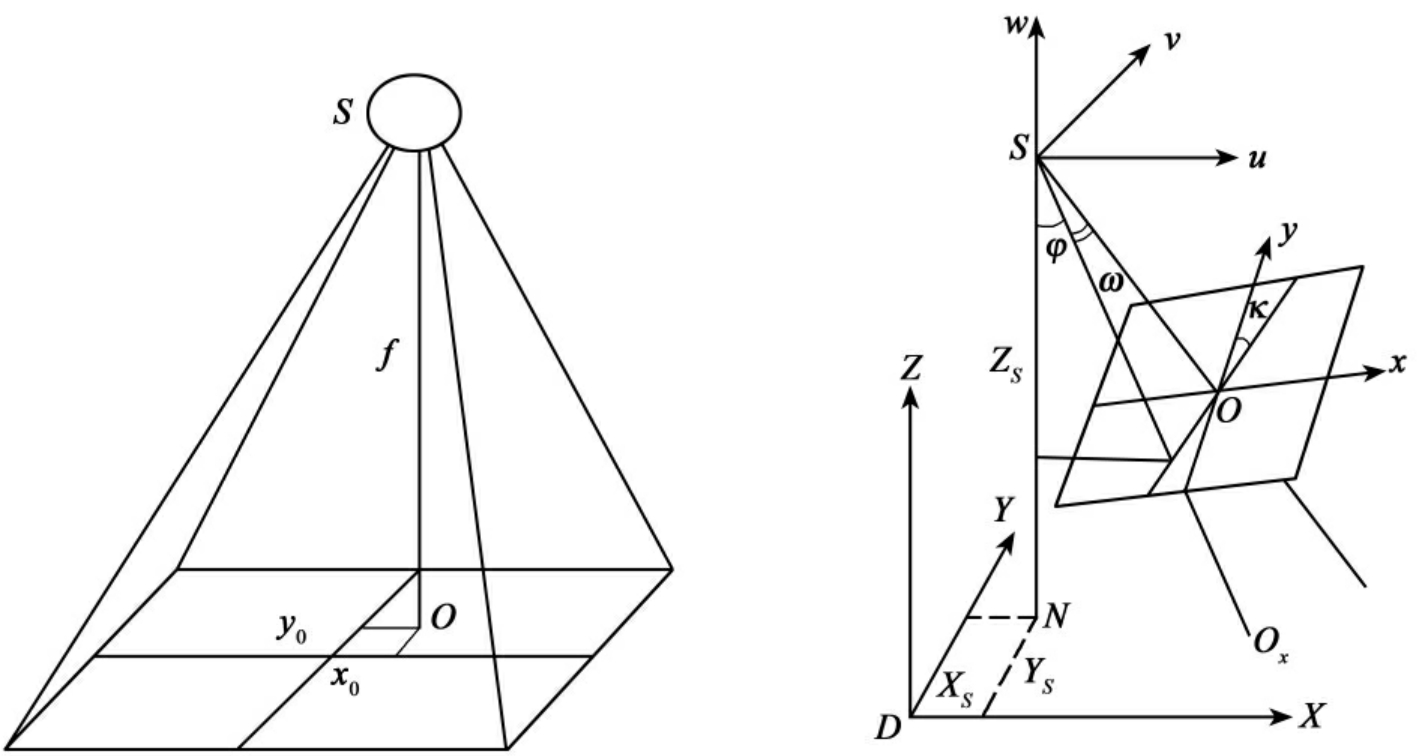
图3-3-1 内、外方位元素
3个直线元素是反映摄影瞬间,摄影中心在选定的地面空间坐标系中的坐标值,通常选用地面摄影测量坐标系,则S在该坐标系的坐标为XS,YS,ZS。假设在S摄站点摄取一张水平像片,若将该片及其像空间辅助坐标系S-uvw首先绕着v轴(称为主轴)在航向倾斜φ角,在此基础上,再绕着次主轴(绕着v轴旋转了φ角的u轴)在旁向倾斜ω角;像片再绕第三轴(经φ,ω旋转后的w轴,即当前的光轴SO)旋转κ角。因此,亦称φ、ω、κ是以ν为主轴的转角系统。
2.共线方程
在恢复摄影机的内外方位元素后,投影光线Sa通过空间点A。这样,摄影中心S、像点a、空间点A三点位于一条直线上,三点共线。它用数学公式来描述三点共线,共线方程为:

它描述了像点a(x-x0,y-y0,-f)、摄影中心S(XS,YS,ZS)与地面点A(X,Y,Z)位于一条直线上,其中a1、a2、a3、b1、b2、b3、c1、c2、c3是由三个外方位的角元素φ、ω、κ所生成的3×3的正交旋转矩阵R的9个元素。
3.单像空间后方交会
利用至少三个已知地面控制点的坐标A(XA,YA,ZA)、B(XB,YB,ZB)、C(XC,YC,ZC),与其影像上对应的3个像点的影像坐标为a(xa,ya)、b(xb,yb)、c(xc,yc),根据共线方程,反求该像片的外方位元素为XS、YS、ZS、φ、ω、κ。这种解算方法是以单张像片为基础的,亦称单像空间后方交会,见图3-3-2。
4.双像空间前方交会
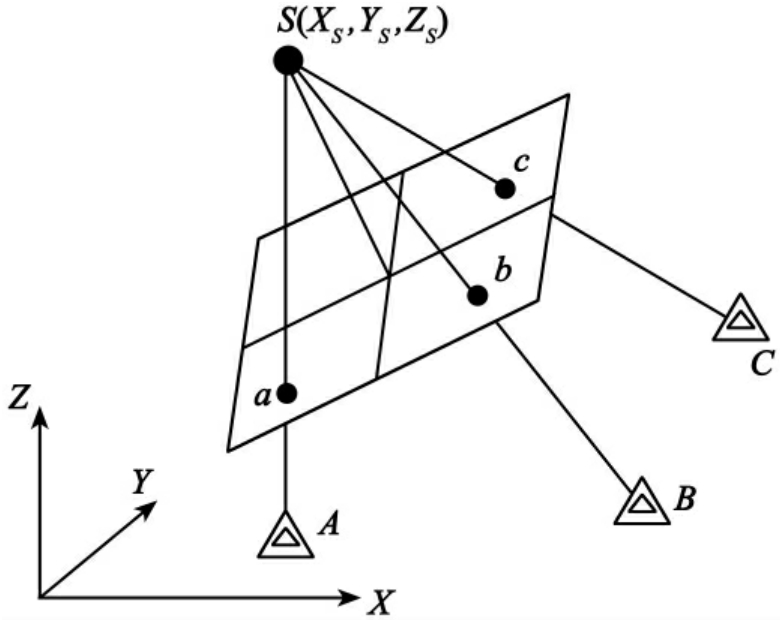
图3-3-2 单像空间后方交会
立体像对与所摄影地面存在着一定的几何关系,这种关系可以用数学表达式来描述,如图3-3-3所示,若在S1、S2两个摄影站点对地面摄影,获取一个立体像对,任一地面点A在该像对的左、右像片上的构像为a1和a2。现已知这两张像片的内外方位元素,设想将该像片按内、外方位元素值置于摄影时的位置,显然同名射线S1a1与S2a2必然交于地面点A。这种由立体像对中两张像片的内、外方位元素和像点坐标来确定相应地面点的地面坐标的方法,称为空间前方交会。
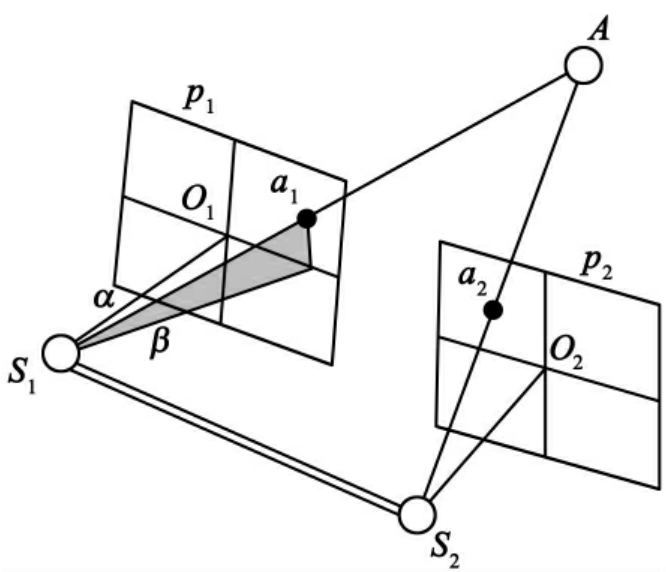
图3-3-3 双像前方交会
5.相对定向
6.绝对定向
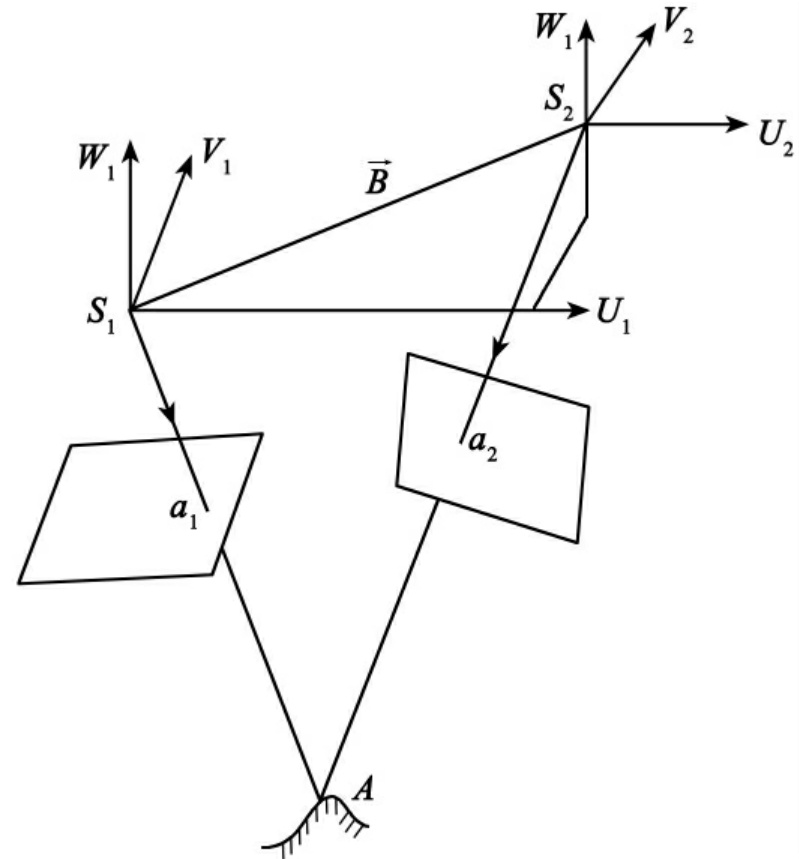
图3-3-4 相对定向
相对定向仅仅是恢复了摄影时像片之间的相对位置,所建立的立体模型是一个以相对定向中选定的像空间辅助坐标系为基准的模型。还要把模型点在像空间辅助坐标系中的坐标转化为地面摄影测量坐标X、Y、Z,求模型点的地面摄影测量坐标:

该式为绝对定向的基本关系式。由于这种变换前后图形的几何形状相似,所以又称为空间相似变换。上式包含有7个绝对定向元素,即:模型比例尺的缩放系数λ,由两坐标轴系的3个旋转角Φ,Ω,Κ,坐标原点的平移量XS、YS、ZS。
解析法绝对定向,就是利用已知的地面控制点,从绝对定向的关系式出发,解求上述的7个绝对定向元素。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










