



第五节 现代计划技术和方法
计划工作的效率高低和质量的好坏,在很大程度上取决于所采用的计划方法。现代计划技术和方法为制订切实可行的计划提供了手段。在计划质量方面,现代计划技术和方法,可以确定各种复杂的经济关系,提高综合平衡的准确性,能够在众多的方案中选择最优方案,能够进行因果分析,科学地进行预测;在效率方面,由于采用了现代数学工具并以计算机技术为基础,大大加快了计划工作的速度,使计划的应变性更好,时效性更强。
现代计划技术和方法发展很快,这里简要介绍四种。
一、网络计划技术
网络计划技术是20世纪50年代出现的一种较新且很实用的计划方法。它包括,各种以网络为基础制订计划的方法,如关键路径法(CPM)、计划评审技术(PERT)、组合网络(CNT)等。
1956年美国的一批工程师和数学家组成了一个专门的小组,首先开始了这方面的研究。该年杜邦公司制订了第一套网络计划。
1958年美国海军武器计划处采用了计划评审技术,使“北极星”导弹工程的工期由原计划的10年缩短为8年。
1961年,美国国防部和国家航空太空总署规定,凡承制军用品必须用计划评审技术制订计划上报。自此,网络计划技术就开始被广泛地应用。
网络计划技术的原理,是把一项工作或项目分成各个作业,然后根据作业顺序进行排列,通过网络的形成对整个工作或项目进行统筹规划和控制,以便用最少的资源、最高的速度完成工作。
网络计划技术特别适用于一次性大规模工程项目的计划管理,对生产周期较长的单件小批量生产类型的计划管理也可获得很理想的效果。
(一)网络图的构成
网络计划法的基础是网络图,掌握网络图的结构是正确绘制网络图的首要条件。网络图是由工序、节点和路线三个基本要素构成的有向赋权图。网络图的形式如图6-3所示。
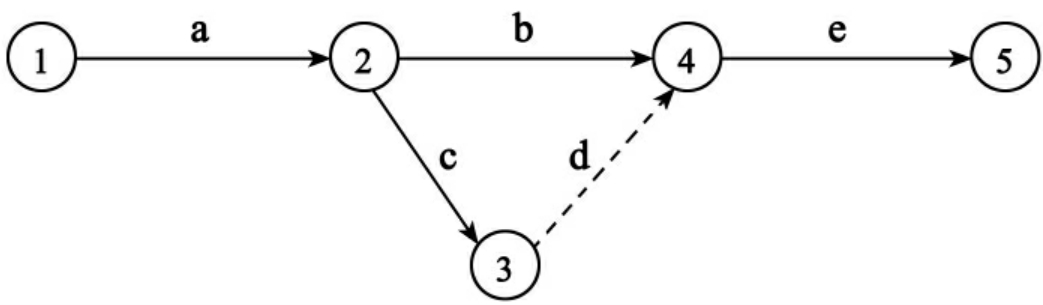
图6-3
1.工序(作业、活动)
这是指一项需要消耗时间、资源和人力才能完成,相对独立的工作。工序通常用箭线“→”表示,箭杆上方标明工序名称,下方标注该工序所需的资源,箭尾表示该工序的开始,箭头表示该工序的结束,箭线的长短与工序大小无关。
虚工序,指不耗用资源和时间的一种只表示前后工序之间逻辑关系的虚拟作业。在网络图中它用虚箭线“ ”表示。
”表示。
2.节点(事项、事件)
这是前后工序的交接点,它既不消耗资源又不消耗时间,用圆圈“○”表示,节点要进行排序编号。一个网络图只能有一个起点节点和一个终点节点,起点节点代表整个计划的开始,终点节点则代表整个计划的完工,中间的任何一个节点都具有双重含义,它既代表着前一工序的结束又是后一工序开始的一瞬间。
3.路线
路线则是指从网络始点顺着箭线方向连续不断地,通达网络图终点的各条通道,其中作业时间之和最长的那一条路线称为关键路线。关键路线的周期也即整个计划的周期。在网络图中,关键路线用粗线、双线或有色线表示。关键路线是相对的,也是可以变化的,在采取了一定的技术措施后,关键路线有可能变成非关键路线,而非关键路线也有可能变为关键路线。
(二)网络图的绘制规则
绘制网络图有以下五项基本规则须遵守:
①有向性,各项工序都用箭线表示,且箭头方向要从左向右。
②无回路,箭线不能从一个节点出发,又回到原来的节点上,即不能出现循环回路。
③二点一线,两节点之间只允许画一条箭线。当出现平行工序或交叉工序时,可引入虚工序(作业)来表示前后逻辑关系。
④网络图中只有一个始点,一个终点。
⑤节点编号应从小到大,从左向右,不可重复。保证箭尾节点号小于箭头节点号。
(三)网络图的绘制步骤
1.调查研究计划项目的有关情况
凡计划项目涉及的所有资料都必须进行收集、调查和分析,其中最主要的内容有两项,一是项目的技术流程;二是计划内各项活动的资源消耗。不然就无法进行网络计划安排。
网络计划法主要的适用对象是那些一次性的大规模项目计划,它们往往无现成的资料可供借鉴。这就需要我们进行深入的调查研究,用科学的方法进行预测,尽可能准确地掌握所需要的计划资料。
2.进行计划项目的分解
这里主要是将整个计划项目分解成若干独立的活动,以掌握每个活动的紧前活动、紧后活动,了解有多少平行活动。在此基础上,绘制出计划项目活动的逻辑关系表。
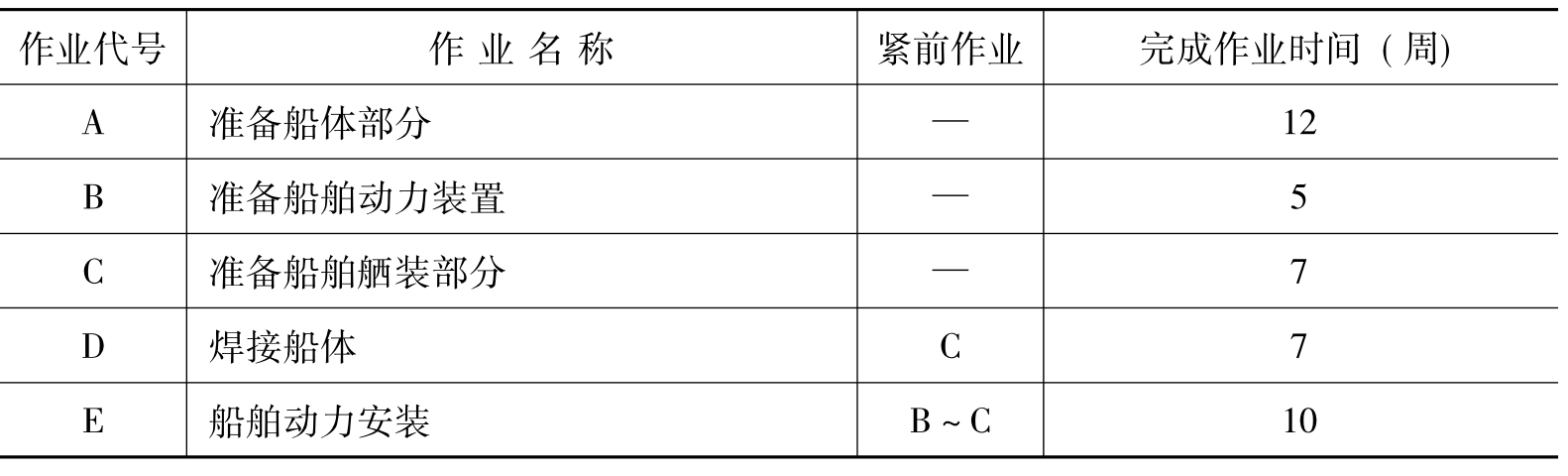
例如,表6-2为建造一艘船舶的活动分析表。表中,紧前作业含该项作业开始之前必须完成的相邻作业。完成作业所需的时间,可采用一定的方法进行测算或估算。
表6-2 建造某船舶的活动分析表
续表

3.按规则绘图
绘图时,必须遵循网络图的绘制规则。根据表6-2绘制网络图(如图6-4所示)。
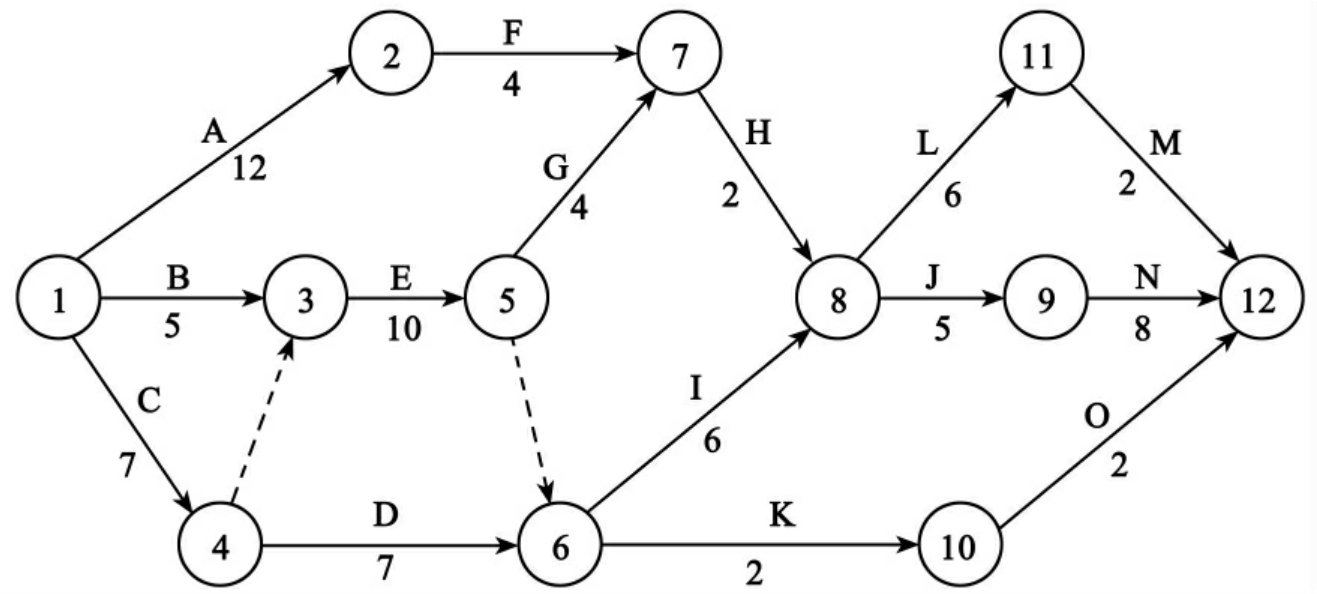
图6-4 网络图
(四)网络时间参数的计算
网络参数的计算方法有:计算机计算法、图上计算法、表格计算法与矩阵计算法四种。
1.作业时间计算
即某活动从开工到完工的延续时间。作业时间分肯定型和非肯定型两类。肯定型作业时间是指以前进行过的活动,其时间长短有资料可以借鉴,经过整理后可直接求出的时间;非肯定型作业时间是指以前没进行过的活动,其所需时间无资料可借鉴,此时用三点估计法进行估算,然后求其加权平均值得出的时间,即对各项活动先估计出最乐观时间(a)、最悲观时间(b)和最可能时间(m)三个值,然后求其加权平均值,以此作为该活动的估计作业时间(T):
![]()
2.节点时间计算
有两个基本时间需要计算,节点的最早开工时间TE(j)和最迟完工时间TL(i)。
①节点的最早开工时间TE(j),指从某节点出发的活动最早可能的开工时间,在这之前不具备开工条件。节点的最早开工时间在图上用“□”表示,计算时顺箭线方向按节点编号逐一进行。
由于TE(1)是始点,即TE(1)=0
其他节点的最早开工时间按下列法则计算,箭头节点的最早开工时间,等于箭尾节点的最早开工时间加该箭线的作业时间,如果有多条箭线指向该节点,则取其相加后的最大值,即:
TE(j)=max{TE(i)+T(i,j)} (j=2,…,n)
②节点的最迟完工时间TL(i),指所有指向该节点的活动最迟必须完工的时间,否则,就会影响后续活动的开工。节点的最迟完工时间在图上用“△”表示,计算时逆箭线方向进行。
由于终点(n点)的最迟完工时间就是它的最早开工时间,即TL(n)=TE(n)
其他节点的最迟完工时间等于该箭头节点的最迟完工时间减该箭线的作业时间,如果有多条箭线从该节点出发,则取其相减后的最小值,即:
TL(i)=min{TL(j)-T(i,j)}(i=n-1,…,2,1)
根据表6-2的资料,其计算结果如图6-5所示。
3.计算总时差TF(i,j)和工序单时差FF(i,j)
①总时差TF(i,j)。在不影响工程的最早结束时间的条件下,工序的最早开工(或完工)时间可以推迟的时间,称为该工序的总时差。即为工序的最迟完工时间(TLF)减去工序的最迟开工时间(TLS);或等于工序的最早完工时间(TEF)减去工序的最早开工时间(TES)。
TF(i,j)=TLF(i,j)-TLS(i,j)
=TEF(i,j)-TES(i,j)
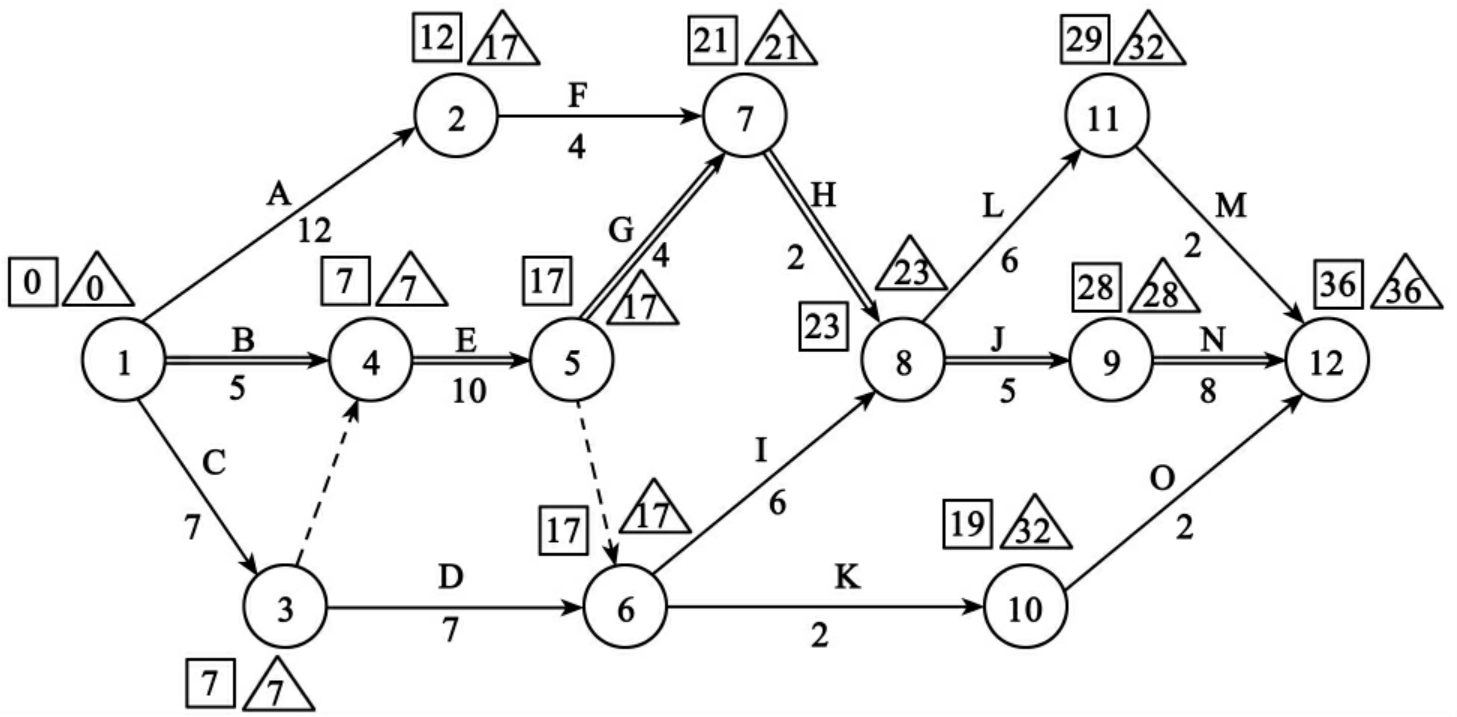
图6-5 含计算结果的网络图
工序总时差越大,表明该工序在整个网络中的机动时间越大,可以在一定的范围内将该工序的资源适当利用到关键工序上去,以达到缩短工程结束时间和节省资源的目的。
②工序单时差FF(i,j)。在不影响紧后工序最早开工时间的条件下,工序最早完工时间可以推迟的时间称为该工序的单时差。
FF(i,j)=TES(j,K)-TEF(i,j)
式中TES(j,k)为工序I→J的紧后工序的最早开工时间。
总时差为零的工序,开始和结束的时间是没有一点机动的余地的。由这些工序组成的路线就是网络中的关键路线。这些工序也称为关键工序。根据该网络图就可以确定关键作业,即必须按时开工与完工的作业,否则将影响整个工期。根据表6-2的资料和网络图各结点计算结果所得到的关键路线如图6-5中的双箭线所示(B-E-G-H-J-N)。
然后再根据所确定的关键作业的网络图重新对所需资源、时间进行新的平衡,经过几次平衡,最后得到一个最优方案。
(五)网络计划的优化和调整
网络计划的优化和调整是基于以下两个方面的考虑:
一是要缩短工期,提前完成任务;
二是想对资源进行最合理的利用以降低成本费用。
对于计划人员来说,掌握和控制关键路线是网络计划技术的精华,只要设法缩短关键路线的时间,或将非关键路线上各工序富余的资源、时间抽出来支援关键路线上的各工序,就能达到上述两个目的。
常见的优化方案有:时间优化;时间—资源优化;时间—费用优化。
用计算工序总时差的方法确定网络中的关键工序和关键路线是最常用的方法。
由网络时间参数的计算过程可看出,其计算过程有一定的规律和严格的程序。故可在计算机上进行计算,亦可用表格法、矩阵法计算。
整个网络计划的平衡优化与作图过程可以用图6-6表示。
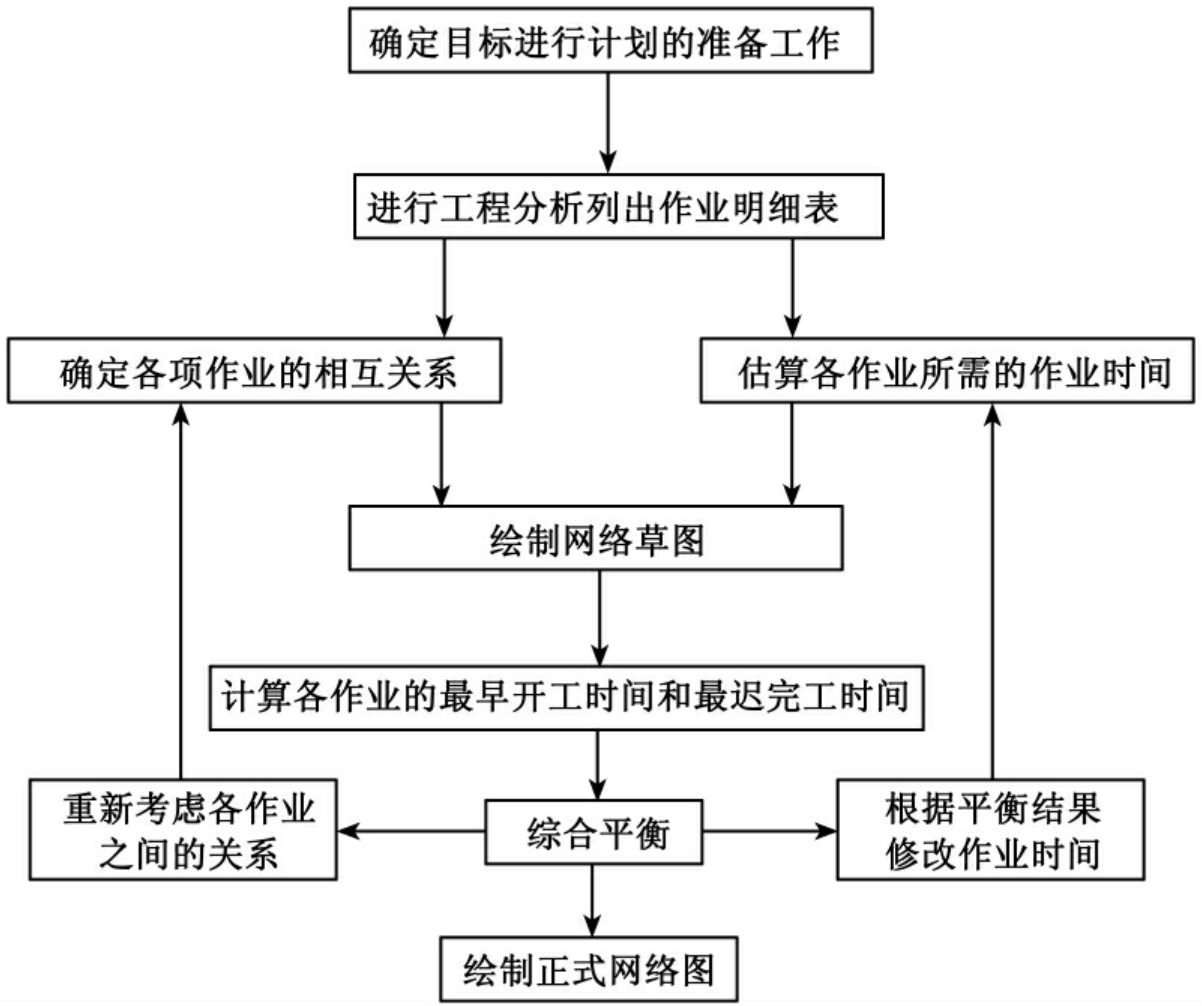
图6-6 整个网络计划的平衡优化与作图过程
二、滚动计划法
滚动计划法是一种编制动态计划的方法。
在计划工作中,由于很难准确地预测将来影响计划的各种变动因素,而且随着计划期的延长,这种不确定性就越来越大。所以,如果硬性地按几年以前的计划实施,可能导致巨大的错误和损失。
为了防止和避免这些不确定性因素可能带来的不良后果,人们创造了滚动计划法。
(一)滚动计划法的基本要点
滚动计划法是根据一定时期计划的执行情况和内外环境的变化,按照“近细远粗”的精神,定期修订、编制未来的计划,并逐期向前推移、滚动,使短期计划、中长期计划有机地结合起来的一种动态计划方法。所以,滚动计划不是一个从某年起到某年止的长期计划,而是一段时间过去了,再补上一段时间的计划,使计划始终保持一定的年度,如图6-7所示。
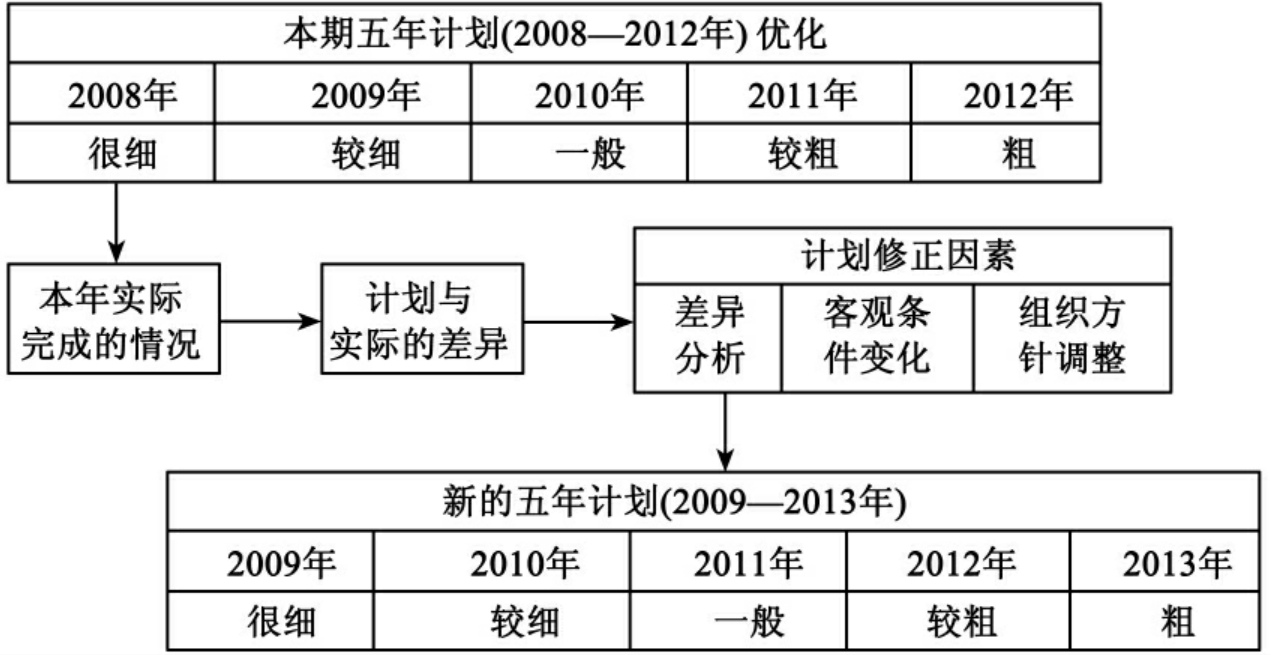
图6-7 滚动计划示意图
(二)滚动计划法的优点
①“近细远粗”切合实际滚动,向前推移,有利于长期目标的实现;
②使短、中、长期计划能相互衔接、相互照顾,使短期计划的各阶段相互衔接,保证了由于环境变化出现某些不平衡时能及时地进行调节,使各期计划大体保持一致。
③滚动计划大大增强了计划的弹性,这在环境变动剧烈的情况下尤为重要,它可以提高组织的应变能力,便于根据新情况、新时期,把握时机,避免风险。
④连续滚动便于保持生产连续,供产销衔接,生产技术准备持续一贯。
⑤它执行一段时间就顺进一个时期,修改优化一次计划。
这就使计划更具适应性、灵活性、严肃性与连续性。
三、线性规划法
1939年,前苏联经济数学家康托诺维奇(Л.В.Конторович)首先提出用线性规划的方法进行经济计划工作,后经许多科学家的继续研究,线性规划法已经成为一种相当成熟的计划方法。
线性规划法主要解决两类问题:一是最大化问题,即在有限的资源条件下,如何使效果最好或完成的工作最多。二是最小化问题,即在工作任务确定的情况下,怎样使各种消耗减至最小。可见,线性规划法就是解决整体效益最优的问题。
例:某企业生产甲、乙两种产品,已知生产一台甲产品需要钢材9吨,电力4000千瓦小时,劳动力30个工作日,净利润7万元;生产一台乙产品需用钢材4吨,电力5000千瓦小时,劳动力100个工作日,净利润12万元。该企业该计划期可提供钢材360吨,电力20万千瓦时,劳动力3000个工作日,请问如何计划两种产品的生产可使所获得的利润最大?
对于此类问题运用线性规划法进行计划十分有效。
设X1为甲产品产量,X2为乙产品产量,由已知条件可得下列约束条件:
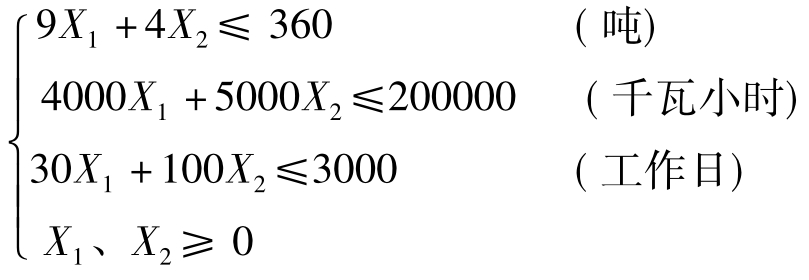
在满足上述条件的情况下,希望净产值最大,即为:
max{f(X1,X2)}=70000X1+120000X2
上式称为目标函数。
可以利用很多办法求解这个问题。
同学们可自行计算一下甲乙两产品各应生产多少台,最大利润又是多少?
利用线性规划法的一般形式可以求解具有许多约束条件和未知变量的优化问题。但建立线性规划法的数学模型时必须具备以下几个基本条件:
①变量之间是线性关系;
②问题的目标可以用数字来表达;
③问题中应存在着能够实现目标的多种方案;
④目标是在一定的约束条件下实现的,并且这些约束条件能用不等式加以描述。
具备上述条件的情况在实践中到处存在。
四、计量经济学的方法
这一方法的奠基人是挪威经济学家弗瑞希(Frisch Ragnar),由于他在这方面作出的突出贡献,曾与他人一起获得了1930年的诺贝尔经济学奖。
计量经济学是将经济学中关于各种经济关系的学说作为假设,运用数理统计的方法,根据实际统计资料,对经济关系进行计量,然后将计量结果和实际情况进行对照,用以调控各种经济比例关系。所以,计量经济学是运用现代数学和各种统计方法来描述和分析各种经济关系的一种现代管理技术。
该方法对于管理人员调节经济活动,加强市场预测以及合理地安排生产计划,改善经营管理都具有很大的实用价值。
(一)计量经济学的方法的运用程序
运用该方法解决实际问题的程序可归纳为以下三步:
1.因素分析
即按问题的实际情况,分析影响它的因素种类、因素之间的相互关系以及各因素对问题的影响程度。
2.建立计量经济模型
根据分析结果,把影响问题的主要因素列为自变量,所有次要因素都用一个随机误差项表示。把问题本身作为因变量,然后建立起含有一些未知参数的计量经济模型。
3.参数估计
由于模型有许多参数需要确定,这就要利用统计资料加以确定。参数估算出来之后就要计算相关系数,以检查自变量对因变量的影响程度。此外,还要对参数进行理论检验和统计检验,如果这两项结果不好就要分析原因,修改模型,重新进行第三步,直到模型满意为止。
(二)计量经济模型的实际应用
计量经济模型主要有三种用途:一是经济预测,即预测因变量在将来的数值。二是评估方案,即对计划工作或决策工作中的各种方案进行评价以选择出最优方案。三是进行结构分析,即用模型对经济系统进行更深入的分析,以深化对系统的认识。
上述三种用途可适于计划工作,它能够使计划更加完善、科学。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










