



4.2.3 点的合成运动
点的合成运动这部分内容,主要是应用运动的合成与分解的概念,研究同一动点相对于两个不同参考系的运动之间的关系。从而建立了点的速度合成定理和加速度合成定理。
1.静系动系
固结于某一参考体上的坐标系Oxyz称为静坐标系,简称静系。通常如不加说明,则以固结于地球表面上的坐标系作为静系。
固结于相对静系运动的参考体上的坐标系O'x'y'z'称为动坐标系,简称动系。
2.三种运动三种速度三种加速度
动点相对于静系的运动称为绝对运动。在绝对运动中的轨迹、速度和加速度称为动点的绝对轨迹、绝对速度和绝对加速度,并以va和aa分别表示该速度和加速度。
动点相对于动系的运动称为相对运动。在相对运动中的轨迹、速度和加速度称为动点的相对轨迹、相对速度和相对加速度,并以vr和ar分别表示该速度和加速度。
动系相对静系的运动称为牵连运动。在某一瞬时,动系上与动点相重合的一点称为动点在此瞬时的牵连点。牵连点的速度和加速度称为动点在该瞬时的牵连速度和牵连加速度,并分别以ve和ae表示之。
上述三种运动的关系如图4.2-10所示,即动点的绝对运动可视为相对运动与牵连运动的合成运动。反之,动点的绝对运动也可分解为牵连运动和相对运动。

图4.2-10
3.点的速度合成定理
可以证明,动点的三种速度va、ve、vr之间有如下关系式:
va=ve+vr
即动点的绝对速度等于它的牵连速度和相对速度的矢量和,这就是点的速度合成定理。根据此定理可知,va、ve、vr构成一速度平行四边形,其对角线为绝对速度va。
由于每个速度矢量包含大小和方向二个量,因此上式总共含有六个量,当已知其中任意四个量时,便可求出其余两个未知量。
应当指出,由于存在相对运动,所以不同瞬时,动系上与动点相重合的那一点即牵连点,在动系上的位置也随之而变化。
4.点的加速度合成定理
动点的加速度合成与牵连运动的性质有关,当牵连运动为平动或转动时,动点的加速度合成定理如下。
牵连运动为平动:aa=ae+ar
牵连运动为转动:aa=ae+ar+ak式中ak称为科氏加速度。它是由于牵连运动与相对运动相互影响而产生的。ak的矢量表达式为
ak=2ω×vr
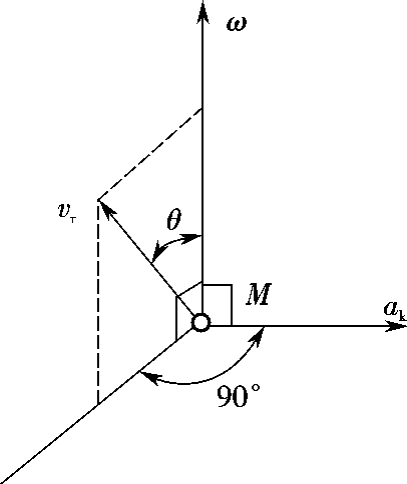
图4.2-11
其中ω为动系的角速度矢。设ω与vr间的夹角为θ(图4.2-11),则ak的大小为
ak=2ωvrsinθ
ak的指向由ω和vr的矢积确定。
对于平面机构,因aa、ae、ar和ak等各加速度矢都位于同一平面中,所以运用加速度合成定理只能求解大小或方向共两个未知量。由于aa或ae或ar都可能存在切向与法向两个加速度分量,因此在求解中,常应用合矢量投影定理进行具体计算。
5.应用速度或加速度合成定理解题的一般步骤和方法
(1)分析机构的运动情况,根据题意适当地选取动点、动系和静系
它们的选取方法,一般可以两个方面来考虑:其一,动系相对静系有运动,动点相对动系也有运动;其二,除题意特别指明动系或动点外,尽可能使选取的动点对动系有明显而简单的相对运动轨迹。在一般机构中,通常可选取传递运动的接触点为动点,与其邻接的刚体为动系。
(2)分析绝对运动、相对运动和牵连运动
绝对运动和相对运动都是指动点的运动。在相对运动的分析中,可设想观察者站在动系上,观察到的动点运动即为它的相对运动。而牵连运动是指动系的运动,也就是固结着动系的刚体相对静系的绝对运动。
(3)根据题意,分析动点的各种速度或加速度,并图示速度或加速度矢量图
动点的va、aa和vr、ar一般可以根据其绝对运动和相对运动进行分析。而在分析ve和ae时,关键在于明确该瞬时牵连点的位置,然后根据动系运动性质分析牵连点的速度和加速度,亦即动点的牵连速度ve和牵连加速度ae;或可以认为动点暂不作相对运动,而把它固结在动系上,则动点随动系运动的速度和加速度即为ve、ae。
另外,在动点的各加速度分量中,当牵连运动为转动时,应含有科氏加速度ak。
(4)根据速度和加速度合成定理求解
①根据运动方程va=ve+vr求解未知量时,一般可应用半图解法,即作出速度平行四边行,然后根据图示的几何关系求得待求量。
②应用加速度合成定理时,首先要区分牵连运动是平动还是转动,然后列出相应的矢量式,即aa=ae+ar或aa=ae+ar+ak,因在最一般情况下,加速度合成定理可写为
aaτ+aan=aeτ+aen+arτ+arn+ak
所以,通常应用合矢量投影定理进行具体计算。不过,应当防止类似于Σax=0或“已知矢量投影=未知矢量投影”等这类错误出现。
【例4.2-7】曲柄OA长为r,以匀角速度ω绕轴O逆时针方向转动,从而通过曲柄的A端推动滑杆BC沿铅直方向上升,如图4.2-12(a)所示。求当θ=60°时,滑杆BC的速度和加速度。
解:取OA上的A点为动点,滑杆BC为动系。动点A的绝对运动是圆周运动;相对运动是水平直线运动;牵连运动是滑杆BC的平动。动点A的速度和加速度矢量图如图4.2-12(b)所示。
由图4.2-12所示的速度和加速度平行四边形,得滑杆BC的速度v和加速度a的大小为
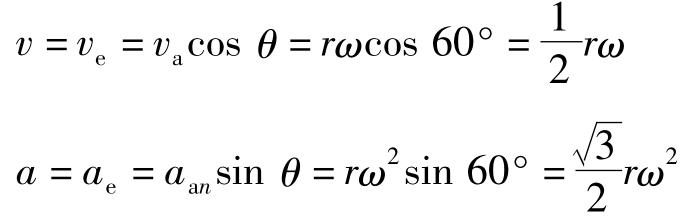
方向如图4.12-12所示。
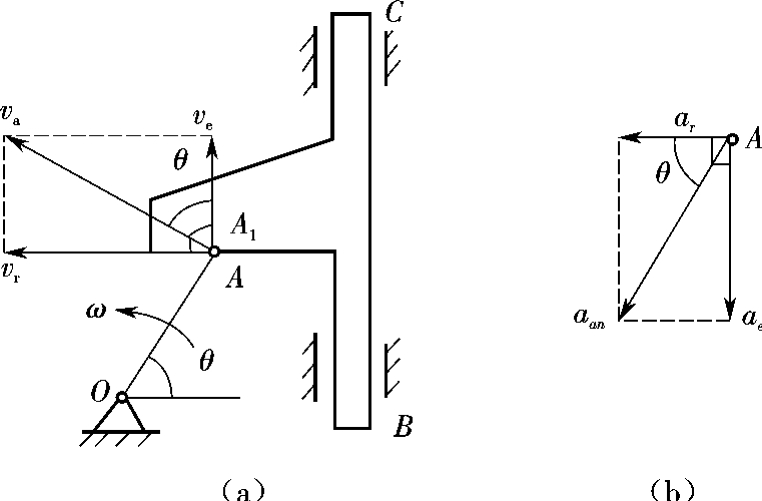
图4.2-12
本题若取滑杆上的A1点为动点,OA杆为动系。则A1点的相对轨迹显然不是一条水平直线。我们可以这样思考,设杆OA不转动,仅BC杆运动,则A1点相对杆OA作铅垂直线运动;反之,若杆BC不动,仅OA杆转动,则A1要相对杆OA作顺时针向的圆周运动。实际上,杆OA与BC同时在运动,故A1点相对杆OA的相对运动应是铅垂直线运动和圆周运动的合成运动,即相对轨迹为一平面曲线,故在加速度计算中,除多一项ak外,还因相对轨迹未知,造成了ar的计算困难。这就表明,若以不恒定运动过程中的接触点A为动点,则将给求解带来不便。
【例4.2-8】直角曲杆OBC绕O轴以匀角速度ω转动,OB=r,小环M套在杆BC和固定杆OA上(图4.2-13),试求图示位置φ=ωt时M的绝对加速度a。
解:动点M,动坐标系固结在OBC上,静坐标系固结地面即OA上。则M的绝对运动为沿杆OA的直线运动,M的相对运动为沿杆BC的直线运动,由于牵连速度 ,方向垂直OM并顺ω转向。于是由点的速度合成公式可得va、vr的大小和方向,其中vr
,方向垂直OM并顺ω转向。于是由点的速度合成公式可得va、vr的大小和方向,其中vr =rω/cos2φ。由于牵连运动作定轴转动,且ω=常量,即ε=0,则aeτ=0,ae=aen=
=rω/cos2φ。由于牵连运动作定轴转动,且ω=常量,即ε=0,则aeτ=0,ae=aen= ,方向由M指向O点;ak=2vrω=2rω2/cos2φ,方向由vr方向顺ω转90°,如图4.2-13所示。设a方向由M点向O,把点的加速度合成公式投影到N轴上,得acosφ=aecosφ-ak;a=ae-ak/cosφ=rω2/cosφ-2rω2/cos3φ。
,方向由M指向O点;ak=2vrω=2rω2/cos2φ,方向由vr方向顺ω转90°,如图4.2-13所示。设a方向由M点向O,把点的加速度合成公式投影到N轴上,得acosφ=aecosφ-ak;a=ae-ak/cosφ=rω2/cosφ-2rω2/cos3φ。
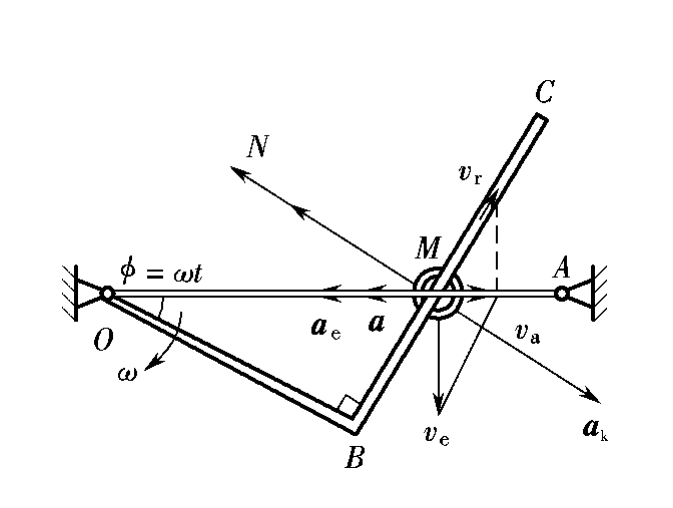
图4.2-13
【例4.2-9】由图4.2-14所示的平面机构中,杆AB以匀速u沿水平方向运动,并通过滑块B推动杆OC转动。试求α=60°时,滑块B相对杆OC的加速度和杆OC的角加速度。
解:取滑块B为动点,杆OC为动系。动点的绝对运动是水平直线运动,相对运动是沿杆OC的直线运动,牵连运动是杆OC绕轴O的转动。动点B的速度分析如图4.2-14所示。由图示的几何关系,得
![]()
因OB=b/sinα,则α=60°时,杆OC的角速度为
![]()
转向顺着ve的指向。
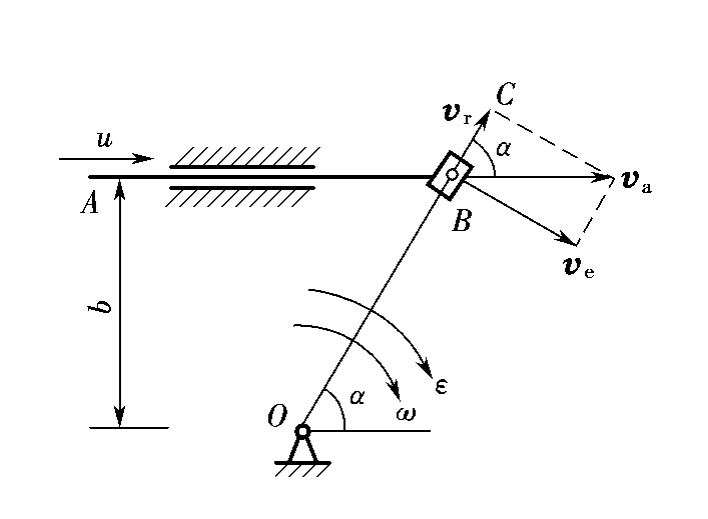
图4.2-14
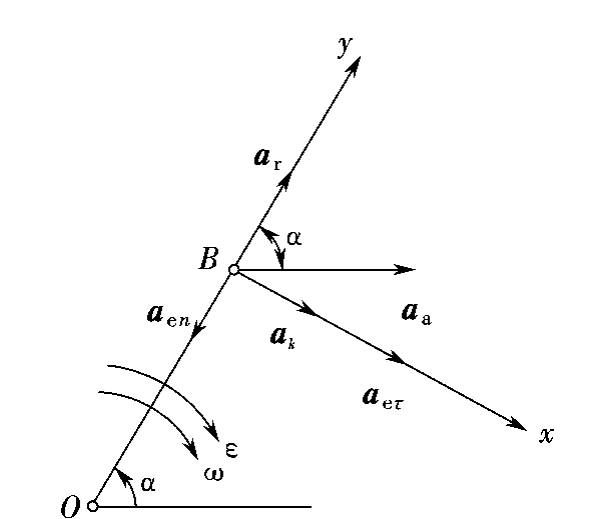
图4.2-15
根据牵连运动为转动时点的加速度合成定理,可作出动点B的加速度矢量如图4.2-15所示。因aa=0,故得
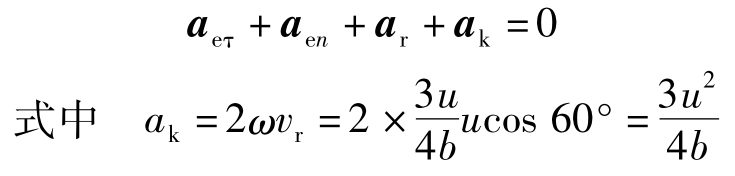
将上述矢量式分别向x轴和y轴投影,得
aeτ+ak=0
ar-aen=0
由此可解得杆OC的角加速度ε和ar分别为

应该注意图中标示的ε转向要与aeτ的指向保持一致,故ε得负值,表示与图示的ε转向相反,即为逆时针方向转向。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











