



1.RS-232C
RS-232C是美国EIA(电子工业联合会)于1969年公布的串行通信接口协议,至今仍在计算机和可编程控制器等数字设备中广泛使用。
RS-232C采用负逻辑,用−5~−15V表示逻辑状态“1”,用+5~ +15V表示逻辑状态“0”。RS-232C的最大通信距离为15m,最高传输速率为20kbit/s,只能进行一对一的通信。RS-232C可以使用9针或25针的D型连接器,PLC一般使用9针的连接器,距离较近时只需要3根线如图7-4所示,其中GND为信号地。RS-232C使用单端驱动、单端接收的电路如图7-5所示,容易受到公共地线上的电位差和外部引入的干扰信号的影响。
2.RS-422A
美国的EIA于1977年制定了串行通信标准RS-499,对RS-232C的电气特性作了改进,RS-422是RS-499的子集。RS-422采用平衡驱、差分接收电路如图7-6所示,从根本上取消了信号地线。平衡驱动器相当于两个单端驱动器,其输入信号相同,两个输入信号互为反相信号,图中的小圆圈表示反相。外部输入的干扰信号主要以共模方式出现,两根传输线上的共模干扰信号相同,因接收器是差分输入,共模信号可以互相抵消。只要接收器有足够的抗共模干扰能力,就能从干扰信号中识别出驱动器输出的有用信号,从而克服外部干扰的影响。
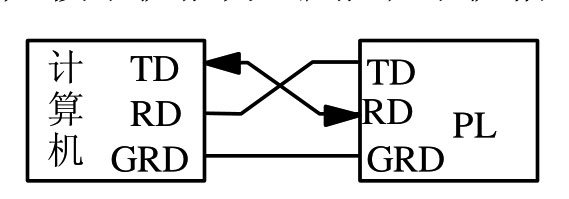
图7-4 RS-232C信号连接
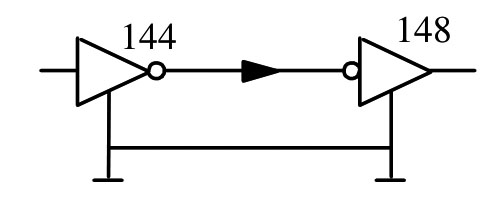
图7-5 单端驱动单端接收
![]()
图7-6 平衡驱动差分接收
RS-422A在最大传输速率(10Mbit/s)时,允许的最大通信距离为12m。传输速率为100kbit/s时,最大通信距离为1200m。一台驱动器可以连接10台接收器。
3.RS-485
在实际工业控制中,要求以最少的信号线完成通信任务,在目前PLC组成的网络控制系统中广泛使用RS-485串行接口总线。RS-485是RS-422A的变形,RS-422A是全双工,两对平衡差分信号线分别用于发送和接收。RS-485为半双工,只是一对平衡差分信号线,不能同时发送和接收。
如图7-7所示,使用RS-485通信接口和双绞线可以组成串行通信网络,构成分布式系统,系统中最多可以有32个网站,新的接口器件已允许连接128个站。
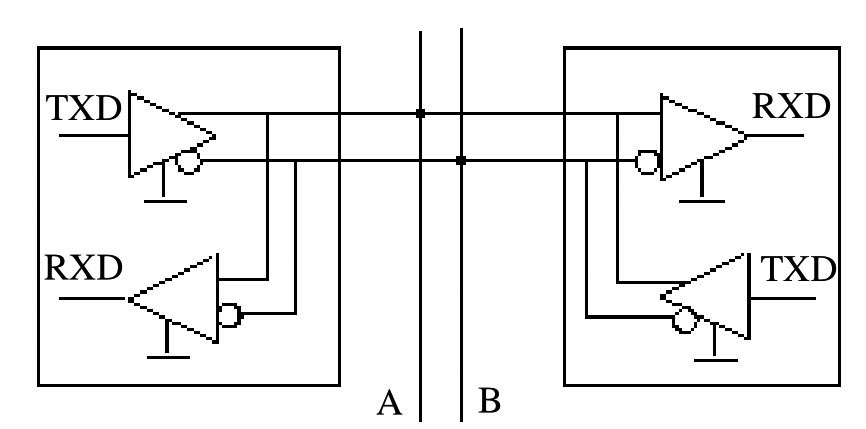
图7-7 RS-485网络
RS-485的特点是通信速率较高(速率可达10Mbit/s以上),具有较强的抗干扰能力,输出阻抗低,并且无接地回路,传输距离较远,适于远距离数据传输。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。









