



4.3 水位改正
所谓水位改正,就是将测得的瞬时深度转化为一定基准上的较为稳定数据的过程。它是海道测量测深数据处理的一项重要工作。在海道测量中比较常用的基准一般采用当地深度基准面,我国目前采用的深度基准面是理论深度基准面。
水位改正方法主要有单站水位改正法、线性内插法、水位分带法、时差法和参数法等,每种方法都有其相应的假设条件,应根据实际情况选择合适的改正方法。
1.单站水位改正法
若测区处于一个验潮站的有效范围内,可用该站的水位资料来进行水位改正。如图4-1所示,ΔZ水表示水位改正(从深度基准面起算的潮高),Z测表示测得的瞬时水深值,则图载水深Z图(从深度基准面起算的水深)为:
![]()
水位改正一般采用图解法和解析法。图解法就是绘制水位曲线图,横坐标表示时间,纵坐标表示水位改正数,如图4-2所示,可求得任意时刻的水位改正数。解析法就是利用计算机以观测数据为采样点进行多项式内插来求得测量时间段内任意时刻的水位改正数的方法。常用内插方法有抛物线插值、二次样条插值等。大量实践表明,采用最小二乘拟合插值计算结果的方差较小且稳定。

图4-1 深度基准面
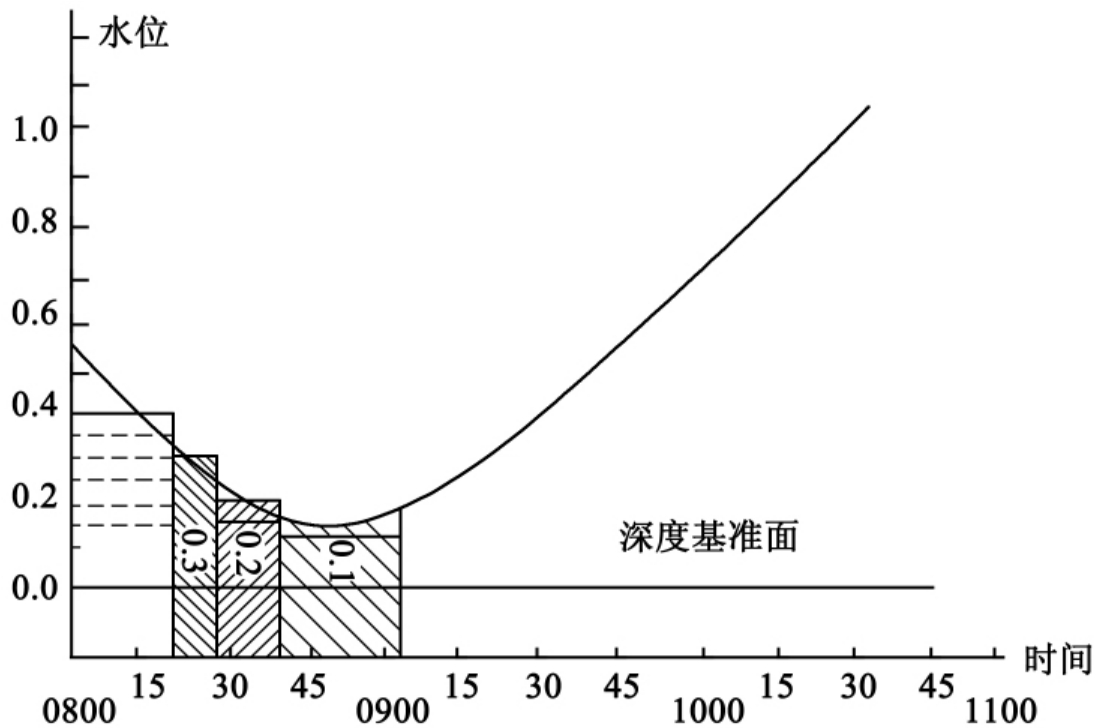
图4-2 潮位与深度基准面
2.线性内插法
如图4-3所示,当测区位于A、B两验潮站之间,且超出两站的有效控制范围时,对测区内各点的任意时刻水位改正方法一般有两种:一是在海区设计时增加验潮站的数量;二是在一定条件下,根据A、B两站的观测资料对控制不到的区域进行线性内插。
线性内插法的假设前提是两站间瞬时海面为直线形态。该法也适应三站情况,基本数学模型为:
两站水位改正: 
三站水位改正: 
式中:zi为对应i点某时刻的水位值;(xi,yi)为对应i点的平面坐标; i= A,B,X;D为测点到A点的距离。
3.水位分带改正法
水位分带改正法又可分为两站水位分带改正、三站水位分带改正(又称三角分带)。
两站水位分带改正法如图4-4所示。水位分带的实质就是利用内插法求得C、D区的水位改正数,分带所依据的假设条件是两站之间潮波传播均匀,潮高和潮低变化与其距离成比例。
(1)分带条件
当测区有潮波图时,可以判断主要分潮的潮波传播是否均匀,来确定分带与否;若测区无潮波图时,可根据海区自然地理(海底地貌、海岸形状等)条件,以及潮流等因素加以分析。一般而言,潮波经过岛屿、海角等地区,变形较大,分带应特别注意;否则应设立验潮站。当两站距离较近,当地的地理条件对潮波自由传播影响不大时,可以认为潮波传播均匀;否则,设站检验。
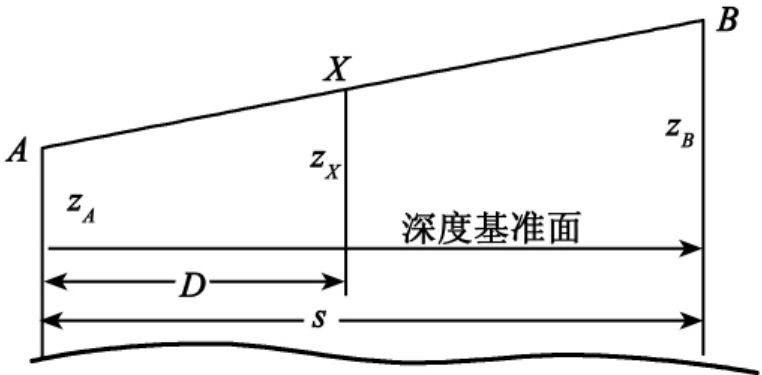
图4-3 两站线性内插示意图
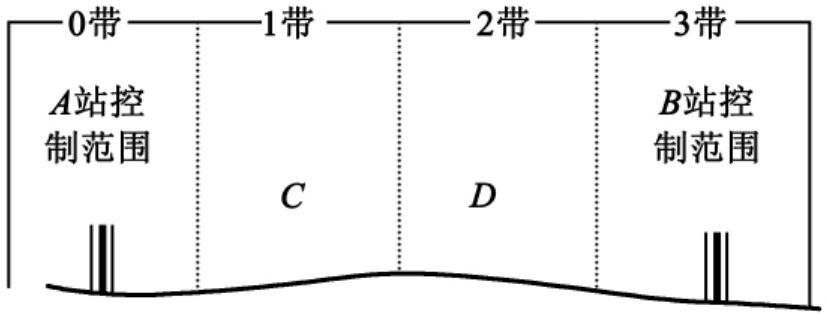
图4-4 验潮站控制区域
(2)分带基本原则
分带的界线方向与潮波传播方向垂直。
(3)分带原理
具体分为几带由具体情况决定。两验潮站之间的水位分带数由下式确定:
![]()
式中:K为分带数;δz为测深精度;Δζ为两验潮站深度基准面重叠时,同一时刻两验潮站间的最大水位差。
分带时,相邻带的水位改正数最大差值不超过测深精度δZ。根据某时刻A或B站的水位数就可以推算出C、D带内某时刻的水位改正数。
为了加强潮波传播垂直方向的控制,常采用三站水位分带改正法。三站水位带改正法(又称三角分带法)分带原则、条件、假设与两站水位分带改正法类似。
如图4-5所示,三站水位分带改正法的基本原理为:先进行两站之间的水位分带,在计算分带时应注意使其闭合。这样在每一带的两端都有一条水位曲线控制(求法与前述相同)。如在第Ⅱ带,一端为C站的水位曲线,另一端为A、B边的第2带的水位曲线。若两端水位曲线同一时刻的Δζ值大于测深精度δZ,则该带还需分区。图4-5中,分区数为2,各区分别为Ⅱ0、Ⅱ1和Ⅱ2。Ⅱ1水位曲线就是由C站和AB边的第2带的水位曲线内插获得的。
以上介绍的两站和三站分带水位改正法为水位分带的图解法。实际应用过程中,可借助计算机进行计算。对于大范围测区,验潮站数量可能多于3个,其水位改正方法则变成以两站、三站分带为基本水位改正单位,联结成改正网,再分带、分区进行任意时刻的水位改正。
4.时差法
时差法水位改正是对水位分带改正法的合理改进和补充。该法所依赖的假设条件与水位分带改正法的假设条件相同。在该假设前提下,运用数字信号处理技术中互相关函数的变化特性,将两个验潮站A、B的水位视作信号,这样研究A、B站水位曲线问题就转化为研究两信号的波形问题。通过对两信号波形的研究求得两信号之间的时差,进而求得两个验潮站的潮时差,以及待求点相对于验潮站的时差,并通过时间归化,最后求出待求点水位改正值。
下面对两个验潮站的潮时差求解阐述如下。
若A、B两站在时间段[N1,N2]内进行同步观测(水位采样),两站的水位采样值分别为序列X1,X2,…,Xn和Y1,Y2,…,Yn,依此做出两站的水位曲线(见图4-6)。
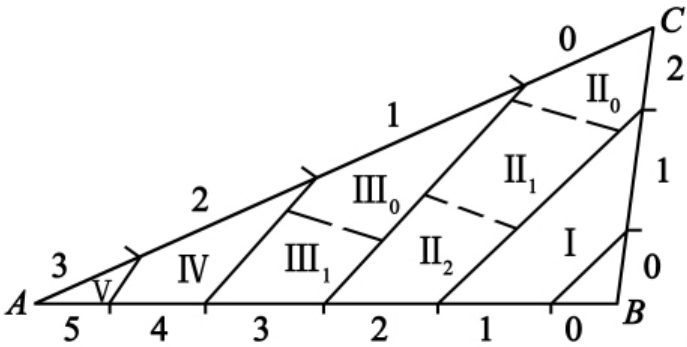
图4-5 三站分带示意图
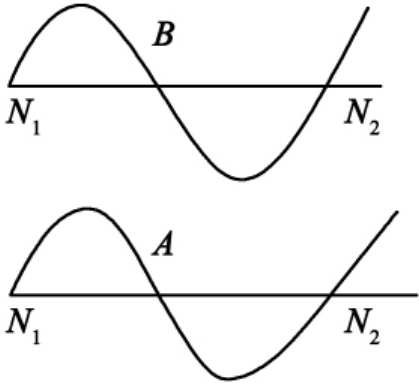
图4-6 两潮位站的水位变化曲线
首先,在进行改正前,探讨两站水位曲线的相似程度。由离散数学知,两曲线的相似程度是由一定采样值的相关系数决定的。相关系数R为:
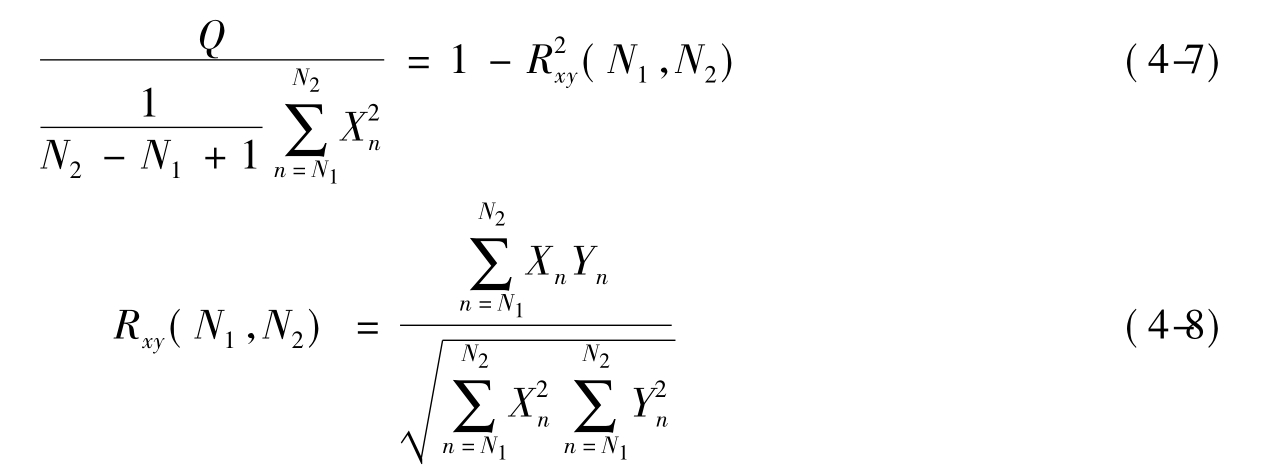
R的大小反映了Xn与Yn相似的程度。其值越接近1,两曲线就越相似。一般进行数学计算时,对水位曲线要进行离散化处理。由于两验潮站之间存在或大或小的潮时差,要确定两验潮站水位曲线的相似性还须对其中一站的水位曲线进行延时处理。即研究在时移中Xn与Yn的相似性。这里把Yn延时τ,使之变为Yn-τ。
Xn与Yn-τ的相关系数为Rxy(τ),该函数是τ的函数,故又称为Xn与Yn的互相关函数,τ为Yn的延时时间。则

τ不同,Rxy(τ)也不同,当τ为某一个值τ0时,Rxy(τ)达到最大值,说明Yn,延时时间τ0后,与Xn最相似。实际上,τ0就是两曲线的相似时差,也就是A、B两验潮站的潮时差。τ0的求解过程是一个逐步迭代的计算过程。
类似地,对于三个验潮站的情形,如图4-5所示的A、B、C中,可以利用上述方法求得彼此间的潮时差。若以A站为基准,则可建立XYτ空间直角坐标系((X,Y)为验潮站的坐标),有A(XA,YA,0)、B(XB,YB,τB)、C(XC,YC,τC)。根据假设条件,三个验潮站中的任意一点P(XP,YP,τP)必位于上述A、B、C三点组成的空间平面上,可以得到任意一点P的时间延时τP为:

由于上面求得的时间延时τB、τC、τP均以A点为基准,欲求待定点P的t时刻的改正数,则需tA、tB、tC将时间改化为与待定点P为t时刻相对应的时间,转化公式为:
tA= t+τP,tB= t+τp-τB,tC= t+τP-τC (4-11)
根据tA、tB、tC可分别求出对应时刻A、B、C各站从深度基准面起算的水位值。计算时,对于定点站用预报值,对于沿岸站用水位插值。最后将各站水位值归算到深度基准面上的水位值ζA、ζB、ζC。同样,也可建立XYζ空间直角坐标系,三站坐标为A(XA,YA,ζA)、B(XB,YB,ζB)、C(XC,YC、ζC)。根据假设条件,三个验潮站中的任意一点P(XP,YP,ζP)必位于上述A、B、C三点组成的空间平面上,故可得任意P点t时刻的水位改正值ζP为:

实际中,可编程进行计算,不仅方便、快速,且精度较高。
5.参数法
参数法从潮汐水位曲线的整体变化入手,采用最小二乘拟合逼近技术,不仅可求出两验潮站的潮时差,还可求出两验潮站的潮差比和基准面偏差,并将分带法的所有假设,体现在数学模型中。
基本原理:令所取A、B两站的水位观测值为整点观测值hA(i)、hB(i),则同步观测N天,便有24×N个观测值。两组观测值可画成两条水位曲线(见图4-7),将两曲线移动,并适当放大或缩小,使两个水位曲线吻合。则建立如下数学模型:
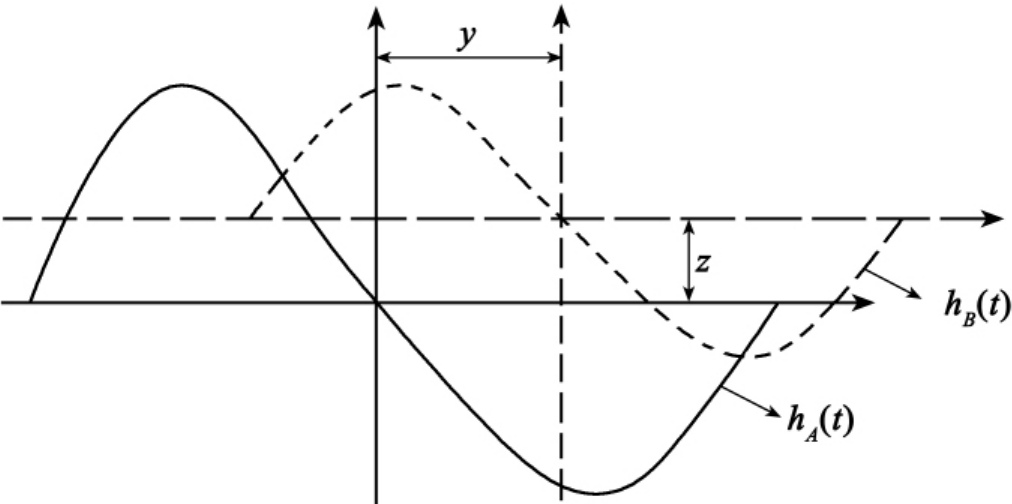
图4-7 两曲线比较示意图
hB= xhA(t+ y)+ z (4-13)
式中:x为垂直比例系数,表示两站间的潮差比(潮高比);y为水平延迟系数,表示两站间的潮时差;z为基准面偏差。
将式(4-13)改为计算的离散化格式,得
hB(i)= xhA(i+ y)+ z(1≤i≤24×N) (4-14)
式(4-14)因对y是非线性的,故需给定初始值(x0,y0,z0),进行线性化,并用Δx、Δy、Δz表示改正数,根据最小二乘原理,有

式中:F为设计矩阵,第i行元素为(h(i+ y), L为闭合差矩阵,第i行元素为
L为闭合差矩阵,第i行元素为
L i= hB(i)-(xhA(i+ y)+ z)(i= 1,2,…,24×N). (4-16)
解出Δx、Δy、Δz后,可得关系值:

这样,可以通过计算程序同时计算出两验潮站的潮时差、潮差比和基准面偏差,利用该法求得结果快,非常适用于数据的自动化处理。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。








