



【摘要】:刀具(或机床)运动位置的坐标值是相对于固定的坐标原点给出,即称为绝对坐标,该坐标系称为绝对坐标系。如图1-20所示,A、B点的坐标均以固定的坐标原点计算,其坐标值为:XA=10,YA=12,XB=30,YB=37。常使用代码表中的第二组坐标U、V、W表示。图1-20中,B点的坐标是相对于前面的A点给出的,其增量坐标为:UB=20,VB=25。U-V坐标系统称为增量坐标系统。在程序编制过程中,是使用绝对坐标系还是使用增量坐标系,可以根据需要和方便用G指令来选择。
三、绝对坐标系和增量坐标系
刀具(或机床)运动位置的坐标值是相对于固定的坐标原点给出,即称为绝对坐标,该坐标系称为绝对坐标系。如图1-20(a)所示,A、B点的坐标均以固定的坐标原点计算,其坐标值为:XA=10,YA=12,XB=30,YB=37。
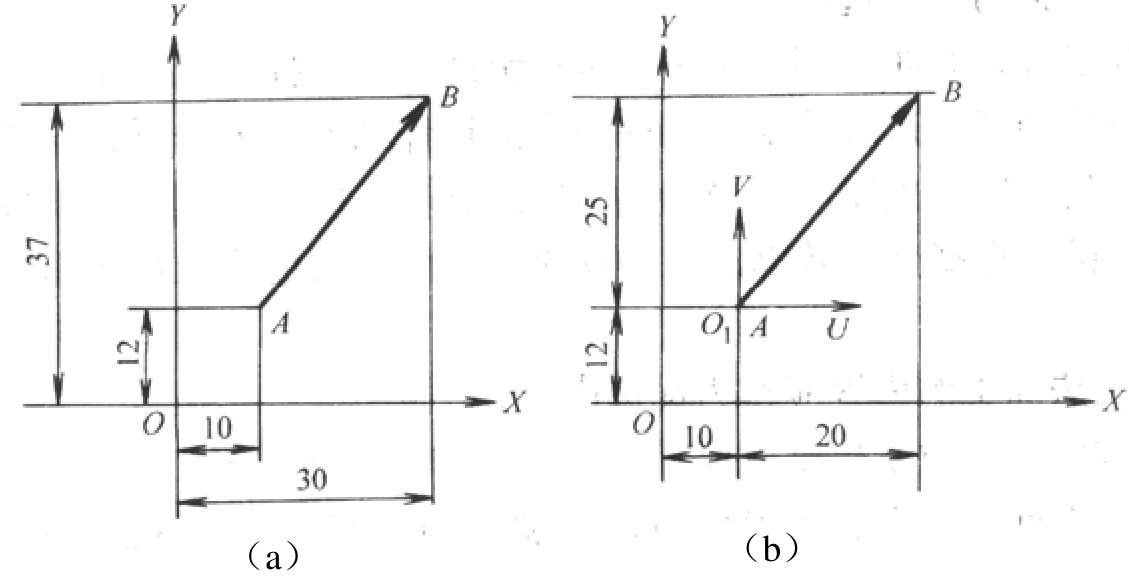
图1-20 绝对坐标与增量坐标
刀具(或机床)运动位置的坐标值是相对于前一位置,而不是相对于固定的坐标原点给出的,称为增量坐标系统。常使用代码表中的第二组坐标U、V、W表示。U、V、W分别与X、Y、Z平行且同向。图1-20(b)中,B点的坐标是相对于前面的A点给出的,其增量坐标为:UB=20,VB=25。
U-V坐标系统称为增量坐标系统。在程序编制过程中,是使用绝对坐标系还是使用增量坐标系,可以根据需要和方便用G指令来选择。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











