



科技进步与“增长函数”
周 方
前 言
1987年诺贝尔经济学奖得主、美国经济学家索洛(R.M.Solow)教授于1957年在其代表作《Technical Change and the Aggregate Production Function》(August,1957)中首次揭示了技术进步(即科技进步)对经济增长的重要推动作用。他的这一重大发现立即引起了世界经济学界和各国政府对科技进步的高度关注。从此,以Solow教授为代表的新古典增长核算理论应运而生,现已成为当今经济学中的主流派理论。40多年来,Solow教授创立的理论与方法一直受人们青睐,至今还广泛流行于整个经济学界。不仅他的理论与方法被广大经济学家和经济工作者用来测算科技进步及其对经济增长的贡献,而且他给世人留下的那个至今仍说不明、道不白的“黑匣子”—非体现的技术进步,还误导着某些著名经济学家去拟造各种各样、五花八门的所谓“技术进步方程式”,试图使那个“非体现的技术进步”内生化,从而建立现代经济增长理论。
本文的分析从源头上就彻底扬弃了前人的传统做法:不是像Solow教授那样虚拟一个所谓的“动态生产函数Q=F(K,L,t)”,而是利用描述投入产出空间内(Kt-Lt-Qt)“增长路径”的“增长函数Qt=H(Kt,Lt)”,来考察科技进步。因为只有反映投入—产出增长过程的增长路径及描述这一路径的增长函数能够最完整地提供科技进步的信息,所以利用增长函数Qt=H(Kt,Lt)来考察科技进步的实质与体现形式,自然是最合理与最正确的。
一、增长路径、增长函数与产出增长
生产中消耗两种生产要素:
1.资本Kt(用于研究、开发、设计、试验、试制、生产、管理、咨询、培训、营销、环保等一切生产活动所消耗的物质资源),其支出费用计入总成本。
2.劳动Lt(用于研究、开发、设计、试验、试制、生产、管理、咨询、培训、营销、环保等一切生产活动所消耗的人力资源,其中包括简单劳动和复杂劳动),其支出费用计入总成本。
下标t表示所指变量(或参数)隐含着时间变量t,即该变量(或参数)随时间而变。
图1为要素空间(Kt-Lt),图中点1、点2和点3分别表示三个时刻的要素投入。
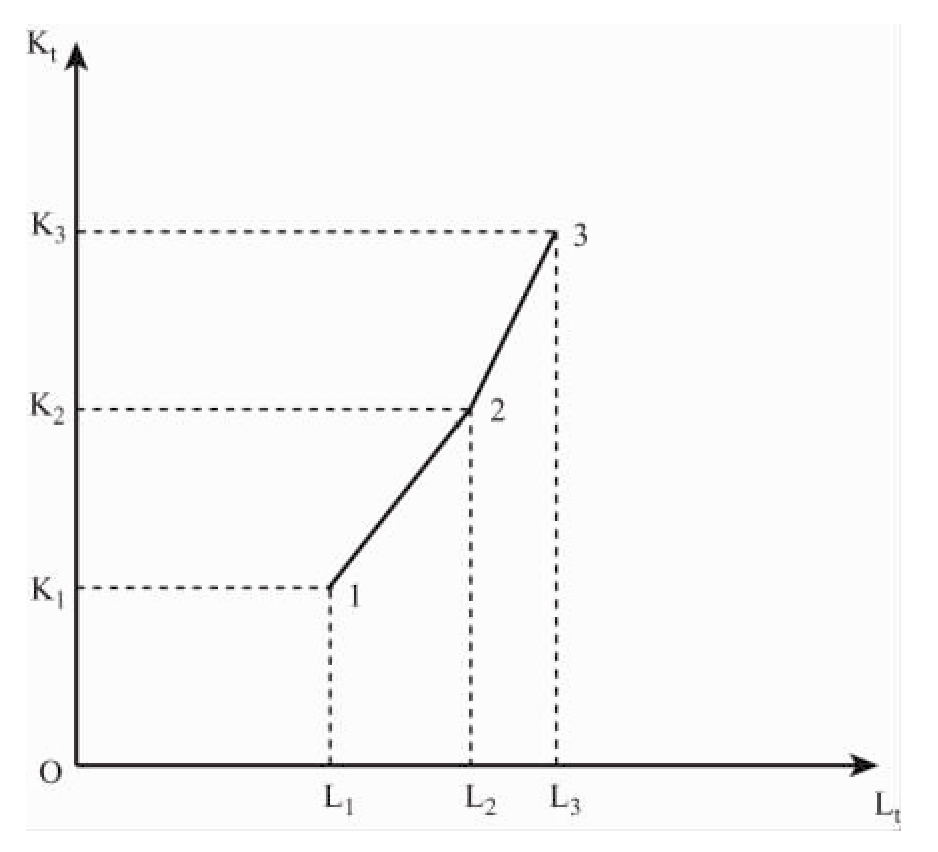
图1 要素空间(Kt-Lt)
注:Kt—资本投入;Lt—劳动投入
用Qt表示产出。对于每一组要素投入(Kt,Lt),都有一个产出Qt与之相对应。因此,对于某个时间序列(Qt,Kt,Lt),在投入产出空间(Kt-Lt-Qt)内存在且仅仅存在一条曲线(空间曲线),与之相对应。我把这条空间曲线称为“增长路径”,如图2中的曲线S-S所示。
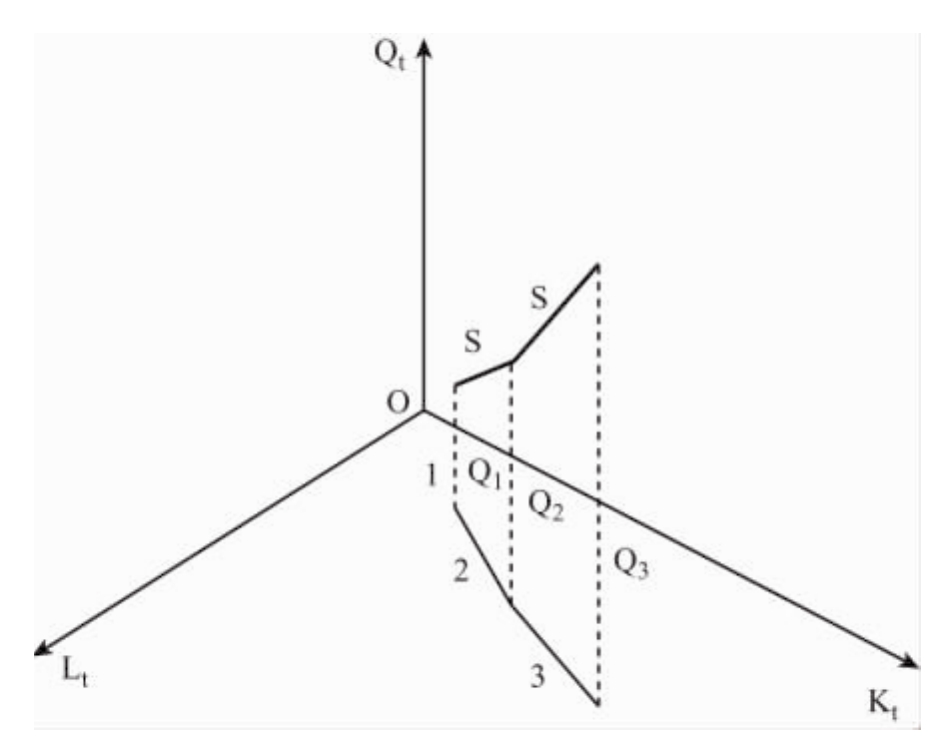
图2 投入产出空间(Kt-Lt-Qt)内的增长路径S-S
注:Kt—资本投入;Lt—劳动投入;Qt—产出
增长路径S-S可以用一个隐含着时间自变量t的函数Qt=H(Kt,Lt)来描述;我把Qt=H(Kt,Lt)称为“增长函数”。“增长函数”定义为“隐含着时间自变量t的投入与产出之间的函数关系”。增长函数Qt= H(Kt,Lt)是一个要素产出弹性为正数的足够光滑的函数。
因此,为了对某已知的时间序列数据(Qt,Kt,Lt)进行拟合,我们不应随意虚构一个所谓的“动态生产函数Q=F(K,L,t)”,而应当利用实际存在的增长函数Qt=H(Kt,Lt)作为待统计检验的拟合函数:
![]()
从增长函数(1)可得产出增长:(为简化书写,省略时间下标t,下同)

公式(2)实际上就是描述投入产出空间(Kt-Lt-Qt)内增长路径S-S的微分方程(参看图2)。
二、“全要素”与全要素增长
生产全过程所消耗的全部资源(“全要素”)的价值即总成本的价值(流量),为:
![]()
式中:QC表示总成本指数(Divisia指数),它就是总成本(全要素)的实际价值;以下皆略去“指数”二字,简称总成本(全要素);PC表示总成本价格指数(Divisia指数)。
从公式(3)可得:

从公式(4)可得总成本价格指数PC的递推公式:
![]()
对于t=1(基年)设PC,1=1.0,可得总成本价格指数的时间序列PC,t(t=1,2,3,…),从而可算出总成本(全要素)的时间序列QC,t:
![]()
公式(5)说明,全要素增长等于诸要素增长按成本份额的加权平均值;在数值上,它就是产出增长中的“外延(粗放式)增长”。
公式(5)中的全要素增长(dlnQC)也可以写成:
![]()
式中:CAK表示平均资本成本(单位产品内消耗的资本成本);CAL表示平均劳动成本(单位产品内消耗的劳动成本);CA表示平均成本(单位产品内消耗的全部成本),显然有:CA≡CAK+CAL。
若将各个时刻的全要素QC,t与对应的产出Qt在投入产出平面(QC,t-Qt)内描绘成曲线,则可得出相应的增长路径,如图3中的曲线S*-S*所示。
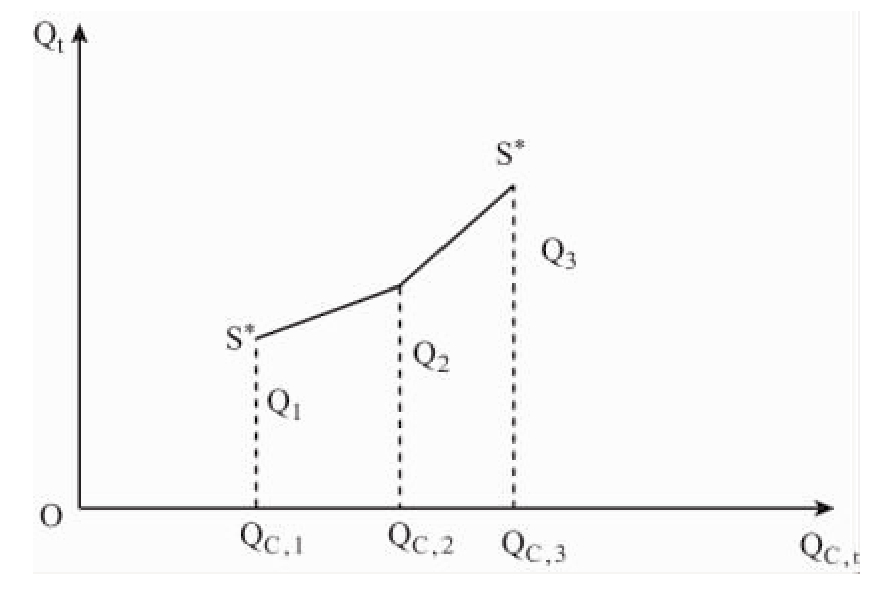
图3 投入产出平面(QC,t-Qt)内的增长路径S*-S*
注:QC,t—全要素投入;Qt—产出
图3中的增长路径S*-S*可以用增长函数来描述:
![]()
若dlnQC≠0,则可从此式得产出增长:(时间下标t均省略,下同)

式中:dQ/dQC=PM表示全要素(沿增长路径)的边际产出;Q/QC= PA表示全要素的平均产出,即全要素生产率(TFP)。
考虑到恒等关系式:
![]()
式中:CA=QC/Q表示产出的平均成本;CM=dQC/dQ表示产出(沿增长路径)的边际成本。
可将公式(8)换写成:
![]()
公式(8)或公式(10)实际上就是描述投入产出平面(QC,t-Qt)内增长路径S*-S*的微分方程(参看图3)。
三、在投入产出平面(QC,t-Qt)内测算科技进步
最完整的生产率定义是“全要素生产率”;“全要素生产率”定义为“产出(实际值)对总成本(实际值)之比值”:
![]()
式中:Q表示产出(Divisia指数);QC表示总成本(Divisia指数)。
全要素生产率是反映生产中全部资源使用效率水平的一个最好的量度,而全要素生产率的增长则是反映资源使用效率提高的一个最好的量度。资源使用效率的提高,完全归因于科技进步,因此,只有“全要素生产率增长”才能够最全面地反映科技进步。
从公式(11)可得全要素生产率增长dln(TFP):
![]()
移项后,得:dlnQ=dlnQC+dln(TFP)
此式表明,产出增长dlnQ可以分解为两个功能性部分:
(1)外延(粗放式)增长dlnQC,归因于并在数值上等于全要素增长;
(2)内涵(集约式)增长dln(TFP),归因于并在数值上等于全要素生产率增长(即科技进步)。
将公式(8)和公式(10)代入公式(12),得:
这样,在投入产出平面(QC,t-Qt)内,度量科技进步的全要素生产率增长dln(TFP)是:
(A1)若dlnQC=0而dlnQ≠0,则dln(TFP)=dlnQ≠0(A1)
[参看公式(12)]
此种情况下,dln(TFP)所度量的是不追加成本的科技进步;
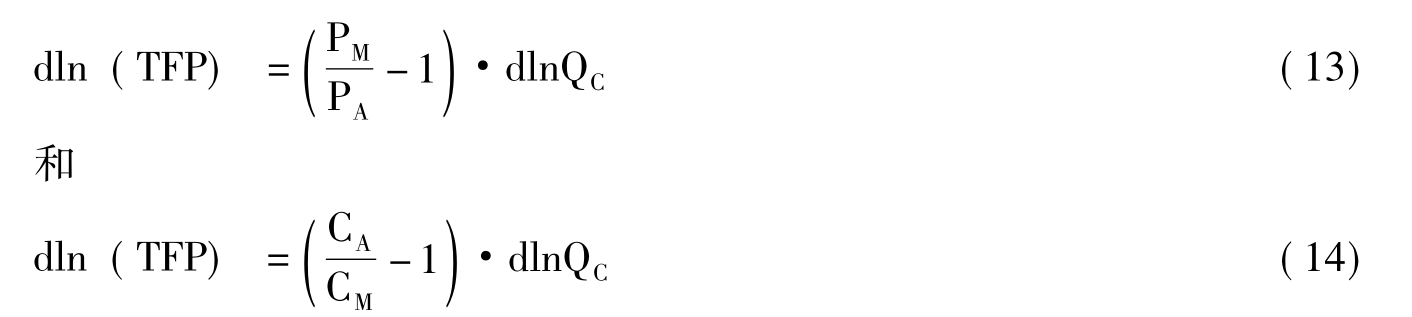
(B1)若dlnQC≠0,则dln(TFP)= ·dlnQC≠0(B1)
·dlnQC≠0(B1)
[参看公式(13)和公式(14)]
此种情况下,dln(TFP)所度量的是追加成本的科技进步。
四、在投入产出空间(Kt-Lt-Qt)内测算科技进步
将公式(5A)代入公式(10),可得:

由于公式(2)和公式(15)同为dlnQ的表达式,而且dlnK和dlnL可以取任意的数值,故有:
![]()
从公式(16)可得:
![]()
从公式(16)和公式(17)可得:
![]()
将公式(18)代入公式(5A),得:
![]()
将公式(17)和公式(5B)代入公式(14),得:
![]()
或写成:
![]()
考虑到公式(2),可将公式(20)写成:
![]()
现引入一个重要参数—“全要素生产率增长对产出增长之比值”(η):
![]()
在α*+β*>1时,有0<η<1;在这种情况下η所表示的就是“科技进步贡献率”。
这样,在投入产出空间(Kt-Lt-Qt)内,度量科技进步的全要素生产率增长dln(TFP)是:

[参看公式(12)]
此种场合下,dln(TFP)所度量的是不追加成本的科技进步,包括下面两种情况:
1)dlnK≠0及dlnL≠0但dlnQC=0(进行要素间替代,以提高效率,但此时保持成本不变),这种科技进步是体现的;这样的情况在实际中较为少见。
2)dlnK=0及dlnL=0(仅仅对已有的要素做某些不追加成本的重新安排或重新组织,以提高已有要素的效率),这种科技进步是非体现的;但是,这样的情况在实际中是极少见或几乎见不到的。
[这就是公式(19)]
此种情况下,dln(TFP)所度量的是规模(总成本)变动下的体现型科技进步(即“规模经济”),我们所处的实际情况通常就是这种情况。
从公式(8)、公式(9)和公式(17)可得下列恒等式:
![]()
式中:α*+β*称为“规模产出弹性”,它在数值上等于“成本产出弹性”。“规模”系指全要素数量,后者用总成本(实际值)QC来计量。α*+β*>1表示规模报酬是递增的;α*+β*<1表示规模报酬是递减的;α*+β*=1表示规模报酬是不变的。
将公式(5A)代入公式(14),可得出用成本表示的全要素生产率增长dln(TFP)(科技进步率)的公式:
![]()
为了测算某个生产单位在某个时刻的科技进步率,由于无法取得该时刻的瞬时弹性值α*和β*(α*和β*按其数学定义是偏导数,因而是不可实际观测的;另外,也不可能通过统计估计出瞬时弹性值α*和β*),故不可使用公式(B2),而应当采用上面这个公式(19A),因为式中的成本数据是可观测的数据。
五、利用相邻两时刻的投入产出表数据测算部门(行业)的科技进步
从公式(12)和公式(5B)可得:
式中:akp=K/Q表示资本投入系数;alp=L/Q表示劳动投入系数。
考虑到公式(5)、公式(5A)和恒等式(18),可得:
利用投入产出表,可以计算出各个部门(行业)的科技进步率。部门j的科技进步率—全要素生产率增长dln(TFPj),是:

式中:下标i表示‘部门i’;下标j表示‘部门j’;Xj表示部门j的总产出;Xij表示部门i向部门j的中间投入数量;Pi表示部门i的产品价格;aij=Xij/Xj表示部门i向部门j的中间投入系数;Mj表示部门j的非竞争性进口品数量;Pmj表示进口品价格;amj=Mj/Xj表示部门j的进口品投入系数;Dj表示部门j的固定资本折旧数量;Pdj表示部门j的固定资本折旧价格;adj=Dj/Xj表示部门j的固定资本折旧投入系数;Lj表示部门j的劳动投入数量;Wj表示部门j的劳动工资率;alj=Lj/Xj表示部门j的劳动投入系数。
六、增长路径的微分方程
将科技进步贡献率η=dln(TFP)/dlnQ代入公式(13),得:

考虑到公式(8),得:
从而得:
![]()
将公式(23)与公式(25)相结合,即得到下面这个非常重要的恒等关系式:
![]()
由此得到投入产出空间(QC,t-Qt)内某增长路径(如图3中的增长路径S*-S*)的微分方程:
![]()
我们重写公式(2):
![]()
它实际上就是投入产出空间(Kt-Lt-Qt)内某增长路径(如图2中的增长路径S-S)的微分方程。
七、描述增长路径的增长函数
在下述两个条件下可以求出微分方程(27)和(28)的解析解:
(a)沿增长路径,科技进步为中性科技进步;
(b)沿增长路径,科技进步贡献率(η)为常数:η= =const.。
=const.。
 就是我们利用增长路径上的时间序列数据(Qt,Kt,Lt)所要寻求的样本期内的科技进步贡献率年均值]
就是我们利用增长路径上的时间序列数据(Qt,Kt,Lt)所要寻求的样本期内的科技进步贡献率年均值]
(1)求解微分方程(27):
求解微分方程(27),即可得到描述投入产出平面(QC,t-Qt)内增长路径的增长函数:
![]()
式中:B是由初始点(QC,1,Q1)决定的积分常数。
由(29)式可知,增长函数(29)是一个正数阶的指数函数(如图4所示)。
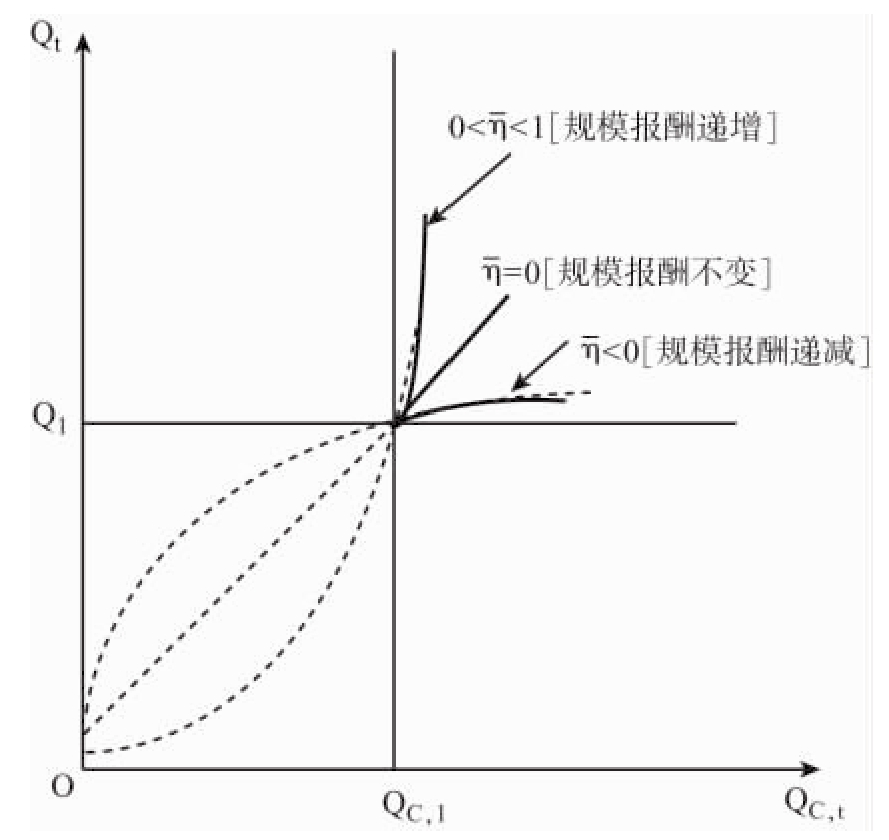
图4 投入产出平面(QC,t-Qt)内的增长函数
(2)求解微分方程(28):
对于微分方程(28),有:
(a)由于科技进步是中性的,故有 =c=const.(c>0)
=c=const.(c>0)
![]()
式中:σ>0。
这样,在上述(a)、(b)两个条件下,我们得到一组代数方程:

式中:σ,c>0。
求解方程组(A),得:

求解这个微分方程,即可得到:
![]()
式中:A是由初始点(K1,L1,Q1)决定的积分常数。
恢复省略了的时间下标t,上面的函数就写成:
![]()
(32)式就是描述投入产出空间(Kt-Lt-Qt)内增长路径的增长函数。
由(32)式可知,增长函数是一个正数次齐次的多变量指数函数。
我们由此得出:在投入产出空间(Kt-Lt-Qt)内,沿增长函数(32)所描述的增长路径,科技进步是中性的科技进步,且科技进步贡献率η为常数:η= =const.。
=const.。
增长函数(32)的对数形式是:
![]()
它就是对增长路径上时间序列数据(Qt,Kt,Lt)进行拟合,以测算科技进步及科技进步贡献率时唯一应取的拟合函数形式。采取任何其他形式的函数作为拟合函数都是错误的。
从公式(30)和公式(31)可得:
![]()
从而可得下列等价关系:
 <1—规模报酬是递减的;
<1—规模报酬是递减的;
 =1—规模报酬是不变的;
=1—规模报酬是不变的;
 >1—规模报酬是递增的。
>1—规模报酬是递增的。
从公式(33)可以得出:
![]()
八、生产函数
下面两种情况之任何一种,都可以被认为是经济意义下的“固定技术”之情况:
(A)对要素投入在数量以及质量上都不作任何的改变;在此情况下,必然有dlnQC=0及dlnQ=0,因而有:dln(TFP)=dlnQ-dlnQC=0;
(B)对要素投入在数量及(或)质量上做某些改变,这时,边际成本(CM)等于平均成本(CA);在此情况下,根据公式(19A):
![]()
有:dln(TFP)=0。
一个生产单位在完全竞争均衡下运营,就属这样的情况。
![]()
以及增长函数(32)就变成:
![]()
(35)和(36)就是某一个别生产单位沿其增长路径在固定技术或完全竞争均衡下运营时的增长函数。
“生产函数”在本义上是“同一行业中一群生产单位同时都处在固定技术或完全竞争均衡下运营时所共同满足的一个投入产出关系”。增长函数系针对某一个别生产单位而言,它所描述的是该生产单位的投入和产出随时间的增长过程;而生产函数则是针对同一行业中某一群生产单位而言的,它所描述的是反映这一群生产单位所处科技水平的投入与产出之间的技术关系。
“一个生产单位沿其增长路径在一组时刻处在固定技术下运营”,满足上述增长函数(35)和(36);那么,对偶地,“一组生产单位在同一个时刻处在固定技术下运营”,也满足关系式(35)和(36),不过这时增长函数(35)和(36)中的时间下标t应换以生产单位序号下标i。
因此,若将增长函数(35)和(36)中的时间下标t代之以序号下标i,来表示“第i个生产单位”,则增长函数(35)和(36)就变为同一行业中一组生产单位的生产函数:

和

式中:下标i表示第i个生产单位; 表示沿生产函数曲面的资本产出弹性,对所取的一组生产单位,它是常数;β表示沿生产函数曲面的劳动产出弹性,对所取的一组生产单位,它是常数。
表示沿生产函数曲面的资本产出弹性,对所取的一组生产单位,它是常数;β表示沿生产函数曲面的劳动产出弹性,对所取的一组生产单位,它是常数。
生产函数(35A)可以等价地写成下列形式:
![]()
这样,我们在理论上导出了唯一存在的生产函数(35A)[或(36A)],它与1928年问世的Cobb-Douglas生产函数完全一样。因此,当今流行的其他类型的所谓“生产函数”(如CES生产函数、超越对数型生产函数等)都没有经济学理论依据,因而都不是生产函数。
九、关于要素替代弹性的数值
要素替代弹性是生产函数理论中的一个重要概念。在本义上,要素替代是指在固定技术或中性科技进步下的替代。要素替代弹性是一个点值,它的直接定义是:
如前面所述,无论是在固定技术下还是在中性科技进步下,都有:
考虑到公式(16),可得:
![]()
由此可得:
从而得:
由此可见,要素替代弹性的数值必然为1,而不可能是其他数值。因此,生产函数必须具有且只需具有“要素替代弹性为1”之特性。本文在理论上通过演绎推理导出的生产函数(35A)[或(36A)]恰好具有这样的特性。这一结果有力地排除了任何其他形式的函数成为生产函数的可能性。
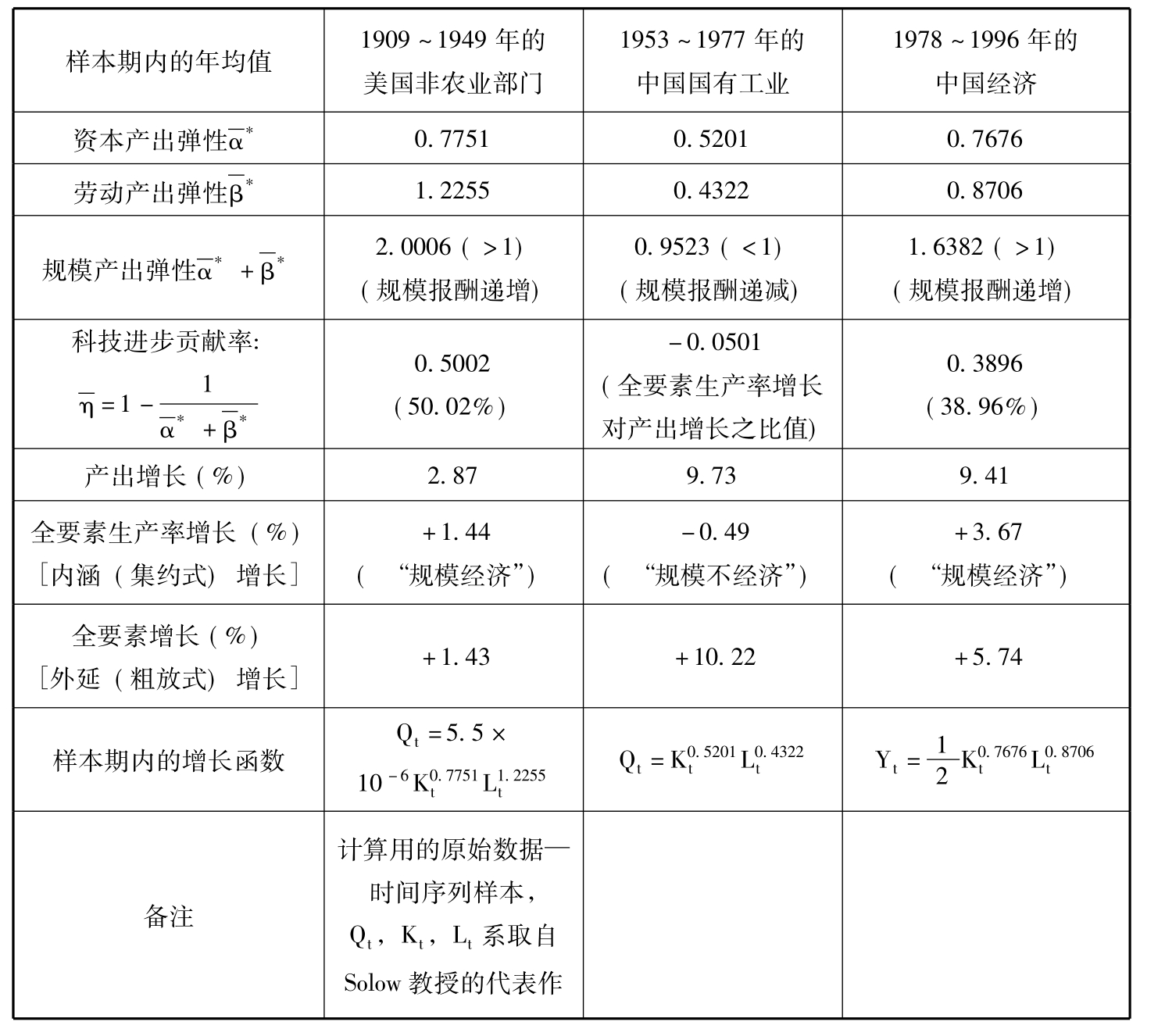
十、科技进步贡献率年均值( )计算实例
)计算实例

来拟合沿增长路径的时间序列样本Qt,Kt,Lt。样本期内的科技进步贡献率年均值η是按公式(34)计算的,计算结果列于表1。
表1 科技进步计算结果
结论
1.只有投入产出空间(Kt-Lt-Qt)内反映投入和产出增长过程的增长路径及描述这一路径的增长函数Qt=H(Kt,Lt)才能够最完整地提供科技进步的信息。因此,本文彻底摒弃了经济学界的传统做法,利用增长函数Qt=H(Kt,Lt)和“全要素生产率”的定义,来考察科技进步的实质与体现形式,这是唯一正确的途径。
2.科技进步来自生产中所有各环节上的知识进步、技术创新、制度创新等创新活动,并贯穿于整个生产活动过程。科技进步来自于机器、设备、工具的改进与换代,科研人员、管理人员和工人的素质与智能的提升,物质资源品质特性的改良,生产决策、组织与管理的原则和方法的改善与革新,等等。在一般情况下,科技进步伴随着生产成本(生产规模)的变动而发生[参看公式(A1)、(B1)、(A2)、(B2)];只有在极少见的极个别场合下,科技进步是一种“不费成本的收益”[参看公式(A2)]。因此,科技进步通常体现为规模经济(内部规模经济及外部规模经济),是体现的;只有在极少见的极个别场合下,科技进步是非体现的,这是本文的重要结论。这个结论与当代主流经济学派—新古典学派(Solow教授是这个学派的代表人物之一)的结论恰好相反。这个学派认为,科技进步只含时间变量t,与生产规模变动无关;因而,在一切情况下,科技进步是外生的,非体现的。早在60年代初期,K.Arrow教授对此就已提出过批评,他说:“将一个非常重要的量完全归因于时间,这在学术上是难以令人满意的”。
3.生产中所有生产要素,包括物质要素和人力要素(即资本和劳动),紧密互补地参与生产,其中任何一种要素都不能没有其他要素的配合与协调而能够单独提供产出,也就是说,只使用其中任何单独一种要素都不可能获得产出。因此,将产出增长分割成诸要素各自对产出增长的贡献部分(如“资本贡献部分”、“劳动贡献部分”、“技术进步贡献部分”等),不仅在逻辑上违反了划分原则(因为这些所谓的“要素贡献”之间以及它们与“技术进步贡献”之间实际上并不独立无关),因而是错误的;而且,这种所谓的“贡献部分”也仅仅只是一些空洞无物的干瘪的数字,对于经济分析与决策毫无实际的意义。但是,产出增长却可以符合逻辑地划分为两个互相无关的功能性部分:全要素增长和全要素生产率增长;前者是外延(粗放式)增长,后者是内涵(集约式)增长(即科技进步所带来的增长)。
4.要素替代弹性的数值必然为1,而不可能为其他的数值。因此,生产函数必须具有且只需具有“要素替代弹性为1”之特性。本文通过演绎推理,首次在理论上揭示了函数(35A)或函数(36A)是唯一的生产函数,它与1928年问世的、举世闻名的“规模报酬不变的Cobb-Douglas生产函数”完全相吻合。它恰好具有“要素替代弹性为1”之特性。因此,除这个生产函数以外,任何其他类型的并非从经济学原理推出的所谓“生产函数”,例如:当今甚为流行的“CES生产函数”、“超越对数型(Translog)生产函数”等,都没有资格成为生产函数。
5.对某一个生产单位的投入、产出时间序列数据(Qt,Kt,Lt)进行拟合,以估计 ,从而测算出该生产单位在样本期内的平均科技进步率时,我们应取增长函数(32)作为拟合函数:
,从而测算出该生产单位在样本期内的平均科技进步率时,我们应取增长函数(32)作为拟合函数:
![]()
函数(32)的对数形式是:
![]()
按公式(32A)估计出资本产出弹性 和劳动产出弹性β*之后,将它们代入公式(34),即可算出样本期内的科技进步贡献率年均值(η):
和劳动产出弹性β*之后,将它们代入公式(34),即可算出样本期内的科技进步贡献率年均值(η):
![]()
6.对同一行业中一组生产单位的投入、产出截面数据(Qi,Ki,Li)进行拟合,以找出这一组生产单位的生产函数时,我们应取生产函数(35A)或(36A)作为拟合函数:

式中:下标i表示第i个生产单位;
 表示沿生产函数曲面的资本产出弹性,对所取的这一组生产单位,它是一个常数。
表示沿生产函数曲面的资本产出弹性,对所取的这一组生产单位,它是一个常数。
7.当我们对某一个生产单位测算它在某个时刻的科技进步率时,由于既不可能直接观测到要素产出弹性值α*和β*(因为它们含有偏导数),也不可能用统计方法估计出瞬时的要素产出弹性值α*和β*,所以我们不能用公式(B2)进行计算,而必须取那个用成本表示的科技进步率公式(19A)来进行计算:
![]()
8.本文所提出的增长核算理论与方法,既适用于微观经济分析,同样也适用于宏观经济分析。
9.人们常把Solow教授1957年创立的测算技术进步的方法称为“生产函数法”。与这个方法相对应,本文提出的测算科技进步的方法可称之为“增长函数法”。
[参考文献]
1.R.M.Solow,“Technical Change and the Aggregate Production Function”,The Review of Economics and Statistics,vol.39(August,1957)
2.Arrow,K.J.:“The Economic Implications of Learning by Doing”,Review of Economic Studies,vol.29,1962
(原载《数量经济技术经济研究》1999年第10期)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










