



§8.8 江西赣大高速公路激光雷达测量项目
8.8.1 项目背景
受国家交通部第二公路勘察设计研究院有限公司委托,广西桂能信息工程有限公司采用国际先进的机载激光雷达测量系统设备对江西赣州至大余段高速公路进行航空摄影测量。
该项目的目标是对长约70km,宽1100m高速公路所在的测区进行机载激光雷达航空摄影,提供以公路中心线为轴线,宽600m的DEM、DOM成果。要求成果平面精度0.5m,高程精度0.2m。
这次摄区如图8-17所示,位于江西省赣州市周边,地理位置为北纬25°38'~25°58',东经114°45'~115°09'。整个摄区范围都在距赣州黄金机场29km半径范围内,平均海拔150m左右,地形起伏不大。
8.8.2 项目执行
该项目航摄飞机为运五—B飞小型单螺旋桨双翼飞机,最高升限4500m,巡航速度220km/h,作业时使用赣州黄金机场。
作业采用广西桂能信息工程有限公司LiteMapper-5600型机载激光雷达测量系统,其激光扫描仪脉冲频率最高可以达100000Hz,能够接收无穷次回波;系统集成2200万像素的航空数码相机,镜头焦距为50mm。
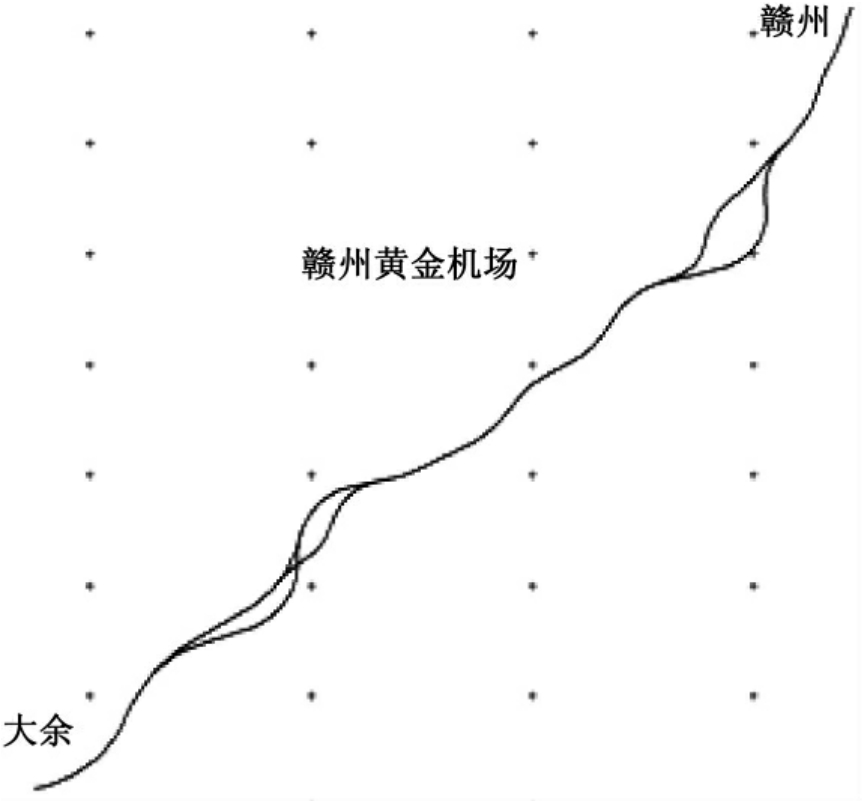
图8-17 测区地理位置及走向示意图
地面基站GPS设备使用三台天宝R8高精度双频GPS接收机,地面GPS控制网是从客户提供的GPS控制点中选取出满足设计要求的9个控制点与布设在机场的控制点进行构网静态联测,将联测结果进行联合平差后得到机场处控制点的坐标,图8-18为GPS控制网布设示意图。
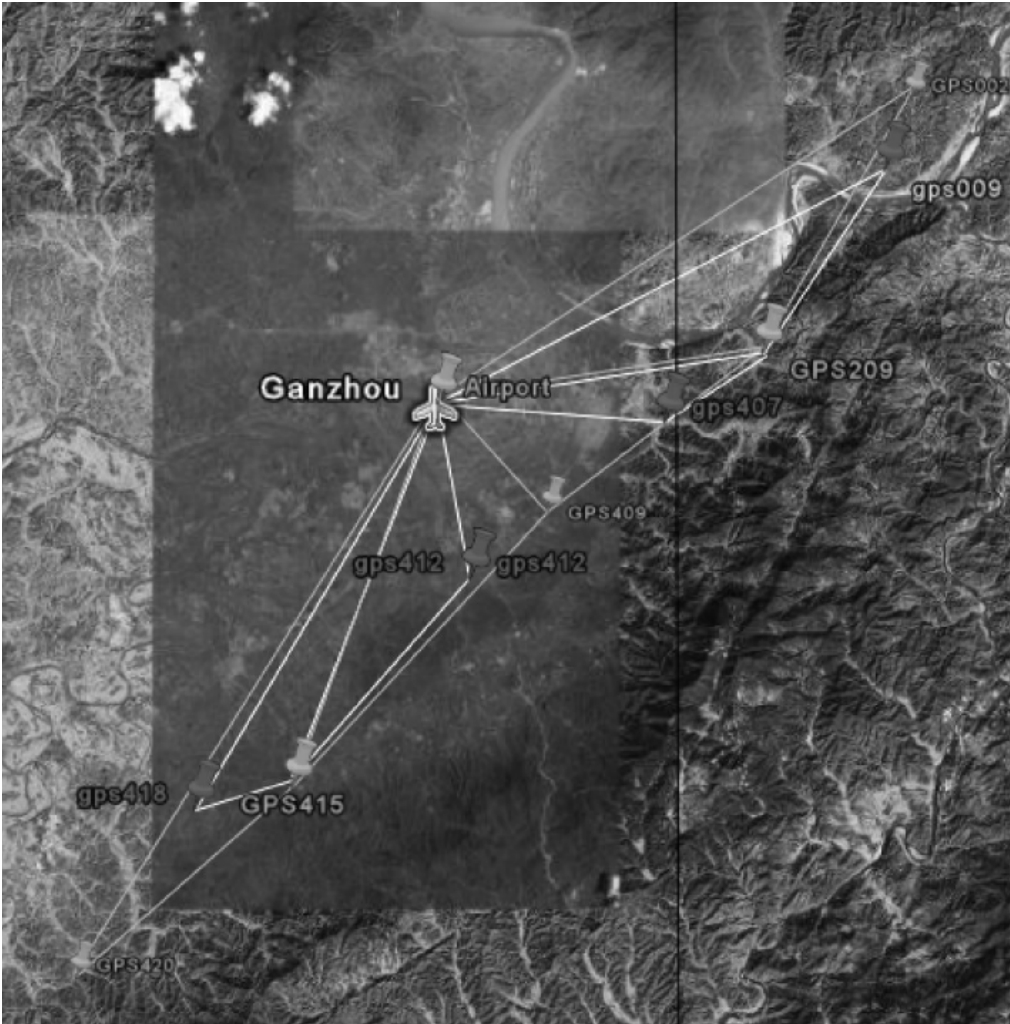
图8-18 GPS控制网布设示意图
实际航摄作业时共采集测区沿线路长约73km数据,宽度为1100m,相对航高是750m,航飞速度为180km/h,共17条航线;相机采用焦距为50mm的镜头,拍摄685张相片,飞行用时约8小时26分钟,共3个架次完成全部数据采集工作。
8.8.3 GPS数据处理
1.地面GPS基站
该项目飞行过程中在机场、415、209这3个控制点架设GPS地面基站。
2.GPS差分解算
利用设备配套的高精度GPS解算软件,基于地面基站点的已知坐标,对机载GPS观测数据和地面基站GPS观测数据进行联合差分解算,得到机载GPS接收机在每个观测时刻的WGS84空间坐标系坐标。
3.IMU/DGPS联合处理
导入IMU记录的飞行姿态数据,在设备厂家的软件中与差分解算成果联合进行处理,获得机载IMU的航迹线,即每个观测时刻的空间位置和姿态。根据测定的偏心向量,从而获得激光扫描仪和航空相机各自的航迹线。
8.8.4 激光数据处理
1.激光点大地定向
利用设备厂家配置的软件,基于激光扫描仪的航迹数据文件,软件自动对每个激光点进行运算处理,得到每个激光点的空间坐标。
2.检校和坐标转换
激光扫描仪与IMU设备之间的三个偏心向量,除平面偏心分量可以直接测定之外,三个偏心角分量需要通过检校场飞行数据来间接测定。
根据已知控制点数据解算出转换参数,对所有激光数据进行处理,把每个激光点从WGS84坐标系转换到西安80坐标系,从大地高程转换到1985高程。
3.激光数据分类
因为我们要获得的最终成果是数字地面模型,即只需要地面的激光点数据,因此需要把激光点云中的地面激光点和非地面激光点进行分类。
使用广西桂能信息工程有限公司自主研发的激光分类专业软件(LiDAR Studio)进行激光分类处理。在进行分类前,需要对激光数据进行去噪处理,剔除错误点、高程异常点,如特别高的点(空中飞行中的鸟或杂质)。对激光数据运行特别录制的批处理命令(宏命令),由软件自动进行分类,能达到90%以上的分类准确率。然后人工交互对自动分类后的数据进行检查和进一步分类。该人工交互时间在整个生产时间中占有较大比重。
4.生成数字高程模型(DEM)
利用数据处理软件导入分类出来的地面激光点数据,构建不规则三角网;基于不规则三角网生成最终的数字高程模型成果(DEM)。
8.8.5 影像数据处理
1.影像格式转换
使用设备厂家配置的软件把数码航片影像文件从原始的FFF格式转换成通用的TIF格式,软件在转换格式的同时可以进行统一的色彩调整。
2.航迹坐标转换
利用激光雷达数据处理软件把相机航迹数据从WGS84坐标系转换到西安80坐标系,从大地高程转换到1985高程。
3.航片外方位元素
利用激光雷达数据处理软件根据每张航片曝光瞬间的GPS时间信息和航迹数据,得到每张航片的六个外方位元素:X、Y、Z、ψ、ω、Κ。
4.生成数字正射影像(DOM)
基于每张航片的外方位元素及地面激光点数据,利用激光雷达数据处理软件自动进行单片微分纠正(倾斜改正、地形纠正),并对设定范围内纠正后的航片进行镶嵌、裁切,得到数字正射影像成果(DOM)。
8.8.6 成果提交
该项目成果坐标基准为:平面坐标系统采用西安80坐标系统,高程系统采用1985国家高程基准,成果内容具体如下:
1.DEM成果
DEM成果共41幅,幅面大小为2km×2km,格网大小为1.0m,每幅之间设有10m的重叠区。根据客户要求,提供两种格式的DEM成果,一种是32位GeoTIFF格式,另一种是XYZ格式。
2.DOM成果
DOM成果共49幅,幅面大小为2km×2km,分辨率为0.2m,每幅之间设有10m的重叠区。DOM成果为GeoTIFF(tfw)格式。
3.原始数码影像
原始数码影像共702张,容量总计43.5G。
4.原始激光数据
原始激光数据文件共41个,容量总计1.07G。
5.相关技术文档
(1)《赣大高速公路航测项目技术设计书》。
(2)《赣大高速公路航测项目总结报告》。
8.8.7 项目小结
该项目成果精度要求高,采用LiteMapper-5600型机载激光雷达测量系统保证原始数据的高质量获取;航摄作业严格按照设计方案实施,实行全程质量控制;广西桂能信息工程有限公司自主研发的激光分类软件(LiDAR Studio Classfication)对于复杂地形的快速、精确分类处理能力为提供符合要求的数据产品提供了技术保障。
该项目所提交成果数据规范、完整,各项精度指标均达到用户要求。经用户对比实验证明,该项目在成果精度和生产效率方面都大大优于传统航测方式所取得的结果。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。










