



2.2 局域差分GPS定位
根据系统构成的基准站个数可将差分GPS分为单基准和多基准的局部区域差分和广域差分。而根据信息发送方式的不同又可将差分定位分为伪距差分、相位差分及位置差分。无论何种差分定位,其工作原理基本相同,都是由用户接收来自基准站的改正量,并对其测量结果进行改正以获得精密的定位结果,区别在于提供的改正内容不同,数据处理也存在着一定的差异。
单基准站差分GPS是根据一个基准站所提供的差分改正信息对用户站进行改正的差分GPS系统。该系统由基准站、无线电数据通信链、用户站三部分组成。基准站一般安放在已知点上,并配备能同步跟踪视场内所有GPS卫星信号的接收机一台,并应具备计算差分改正和编码功能的软件。无线电数据链将编码后的差分改正信息传送给用户,它由基准站上的信号调制器、无线电发射机和发射天线以及用户站的差分信号接收机和信号解调器组成。用户站根据各用户站不同的定位精度及要求选择接收机,同时用户站还应配有用于接收差分改正数的无线电接收机、信号解调器、计算软件及相应接口设备等。所谓多个基准站的局部区域差分GPS系统是在一个较大的区域布设多个基准站,以构成基准站网,其中常包含一个或数个监控站,位于该区域中的用户根据多个基准站所提供的改正信息经平差计算后求得用户站定位改正数。
图2-3是GPS动态相对定位示意图。
根据提供的差分改正量不同,将局域差分分为伪距差分、位置差分和载波相位差分三种。
1.伪距差分原理
伪距差分是通过在基准站上利用已知坐标求出测站至卫星的距离,将其与含有误差的测量距离进行比较,然后利用滤波器将此差值滤波并求出其偏差,并将所有卫星的测距误差传输给用户,用户利用此测距误差来改正测量的伪距,并解算出用户自身的坐标。
测站i与卫星j之间在t时刻的伪距为:
![]()
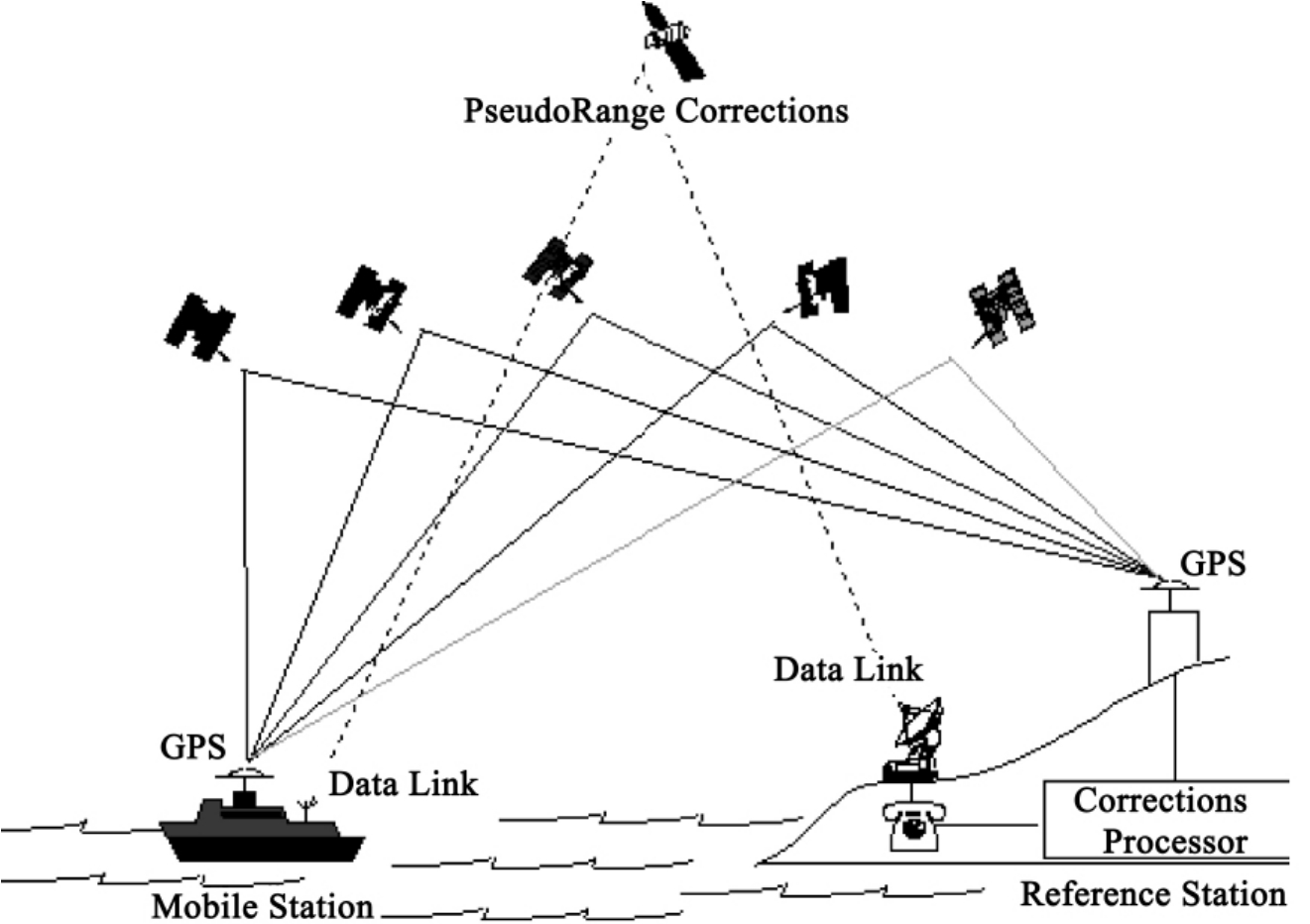
图2-3 GPS动态相对定位
根据基准站的三维已知坐标和GPS卫星星历,可以算得该时刻两者之间的几何距离:
![]()
故由基准站接收机测得的包含各种误差的伪距与几何距离之间存在差值:
![]()
 即为伪距的改正值,将此值发送给用户的接收机。用户接收机k将测量的伪距加上此项距离改正,便求得经过改正的伪距:
即为伪距的改正值,将此值发送给用户的接收机。用户接收机k将测量的伪距加上此项距离改正,便求得经过改正的伪距:
![]()
如果考虑信号传送的伪距改正数的时间变化率,则有
![]()
当用户运动站与基准站之间的距离小于100km时,有
![]()
则改正后的伪距ρ~'j k为:
![]()
式中:δVt为两测站接收机钟差之差,(Xk,Yk,Zk)为用户站的位置。
当基准站同用户站同时观测相同的4颗或4颗以上的卫星时,即可实现用户站的定位。由于伪距差分可提供单颗卫星的距离改正数δρji,用户站可选择其中任意4颗相同卫星的伪距改正数进行改正,且伪距改正数是在WGS-84坐标系上进行的,无须进行坐标变换。
2.位置差分原理
位置差分是一种最简单的差分方法。安置在已知点基准站上的GPS接收机通过对4颗或4颗以上的卫星观测,便可求出基准站的坐标(X',Y',Z')。由于存在卫星星历、时钟误差、大气折射等误差的影响,该坐标与已知坐标(X,Y,Z)不一样,存在误差。即
![]()
式中:ΔX、ΔY、ΔZ为坐标改正数,基准站利用数据链将坐标改正数发送给用户站,用户站用接收到的坐标改正数对其坐标进行改正:
![]()
如果考虑数据传送时间差而引起的用户站位置的瞬间变化,则式(2-7)可写为:
式中:t为用户站时刻; t0为基准站校正时刻。
经坐标改正后的用户坐标消除了基准站与用户站的共同误差,如卫星星历误差、大气折射误差、卫星钟差、SA政策影响等,提高了定位精度。坐标差分的优点是需要传输的差分改正数较少,计算方法较简单,任何一种GPS接收机均可改装成这种差分系统。
3.载波相位差分原理
其原理与伪距差分GPS定位原理类似。载波相位差分GPS有两种定位方法:一种是基准站将载波相位的改正量发送给用户站,以对用户站的载波相位进行改正实现定位(改正法);另一种是将基准站的载波相位发送给用户站,并由用户站将观测值求差进行坐标解算(求差法)。
(1)改正法的定位原理
在载波相位测量中,卫星到测站点之间的相位差值主要由三部分组成:
![]()
式中:Nji(t0)为起始整周模糊度;Nji(t-t0)为从起始时刻至观测时刻的整周变化值;δφji为测量相位的小数部分。将上式乘以载波波长λ,则可得卫星至测站点之间的距离为:
![]()
在基准站,利用已知坐标和卫星星历可求得基准站到卫星之间的真实距离ρji,则测量得到的伪距可表示为:
![]()
式中:δti为接收机钟差;δtj为卫星钟差;δIji为电离层误差;δTji为对流层误差;δMi为多路径效应;Vi为GPS接收机噪声。在基准站求出的伪距改正数为:
![]()
如果用δρji对用户站伪距观测值进行修正,则
![]()
当基准站与用户站间距离小于30km时,有
![]()
因此式(2-13)可改写为:
![]()
将载波相位伪距值式(2-12)代入观测方程(2-14),可得

![]()
式中: ,Xk,Yk,Zk及Δφ为未知数,其中N(t0)为起始整周数之差,只要不失锁即为常数,而用户坐标值为变化量,Δδρ也为一个变化量。由于接收机钟差之差、两站间多路径效应之差及两个GPS接收机的噪声之差在两历元之间的变化量均小于厘米级动态定位允许的误差,因此其在求解过程中可视为常数。
,Xk,Yk,Zk及Δφ为未知数,其中N(t0)为起始整周数之差,只要不失锁即为常数,而用户坐标值为变化量,Δδρ也为一个变化量。由于接收机钟差之差、两站间多路径效应之差及两个GPS接收机的噪声之差在两历元之间的变化量均小于厘米级动态定位允许的误差,因此其在求解过程中可视为常数。
由式(2-16)可知,如果起始整周未知数被确定,就可通过基准站和用户站同时观测相同的4颗卫星,求解出用户站的坐标(Xk,Yk,Zk)和Δδρ来实现定位。因此,如何快速求解起始整周未知数是实现载波相位差分动态定位的关键。
(2)求差法的定位原理
求差法在流动站获得单差、双差、三差求解模型,并求解。首先用户站在保持不动的情况下,静态观测若干历元,并将基准站上的观测数据通过数据链传送给用户站,按静态相对定位法求出整周未知数,即初始化;其次,将求出的整周未知数代入双差模型,此时双差只包括ΔX、ΔY、ΔZ三个位置分量,只要4颗以上卫星的一个历元的观测值,就可实时地求解出三个位置分量;然后,将求出的ΔX、ΔY、ΔZ坐标增量加上已输入的基准站的WGS-84地心坐标Xi、Yi、Zi就可求得此时用户站的地心坐标,即

利用已获得的坐标转换参数,将用户站的坐标转换到当地的空间直角坐标系。
求差模型可以消除或消弱多项GPS卫星观测误差,如消除卫星钟差、接收机钟差,消弱卫星星历误差、大气折射误差,因此可以大大提高实时定位的精度。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。









