



2.4.1 水下声学定位的基本原理和方法
水声定位系统通常由船台设备和若干水下设备组成。其中船台设备包括一台具有发射、接收和测距功能的控制、显示设备和置于船底或置于船后“拖鱼”内的换能器以及水听器阵。水下设备主要是声学应答器基阵。所谓基阵,即固设于海底的位置已准确测定的一组应答器阵列。下面对这些水声设备分别加以介绍。
换能器实质上是一种声电转换器,能根据需要使声振荡和电振荡相互转换。为发射(或接收)信号服务,起着水声天线的作用。最常使用的是磁致伸缩换能器和电致伸缩换能器。
水听器本身并不发射声信号,只起到接收声信号的作用。通过换能器将所接收到的声信号转变成电信号,输入船台或岸台的接收机中。
应答器既能接收声信号,又能发射不同于所接收声信号频率的应答信号,是水声定位系统的主要水下设备,也能作为海底控制点的照准标志(即水声声标)。
水声定位系统通常有测距定位和测向定位两种方式,其原理如下。
1.测距定位方式
水声测距定位原理如图2-7所示,由船台发射机通过安置于船底的换能器M向水下应答器P(位置已知)发射声脉冲信号(询问信号),应答器接收该信号后即发回一应答声脉冲信号,船台接收机记录发射询问信号和接收应答信号的时间间隔,通过式(2-18)即可算出船至水下应答器之间的距离:
![]()
根据已知的应答器的深度Z,按式(2-19)即可求出船台至应答器之间的水平距离D:
![]()
如果有两个水下应答器,则可获得两条距离,可以双圆方式交会出船位。若对三个以上水下应答器进行测距,则可采用最小二乘法求出船位的平差值。
2.测向定位方式
这种定位方式在海底控制点(网)的布设以及诸如钻井平台的复位等作业中经常用到,其工作原理如图2-8所示。船台上除安置换能器以外,还在船的两侧各安置一个水听器,即a和b。P为水下应答器。设PM方向与水听器a、b连线之间的夹角为θ,a、b之间距离为d,且aM= bM= d/2。
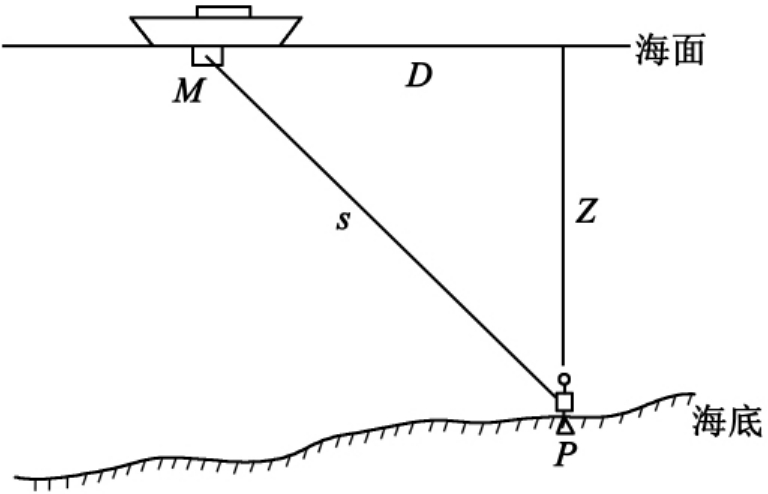
图2-7 水声测距定位原理
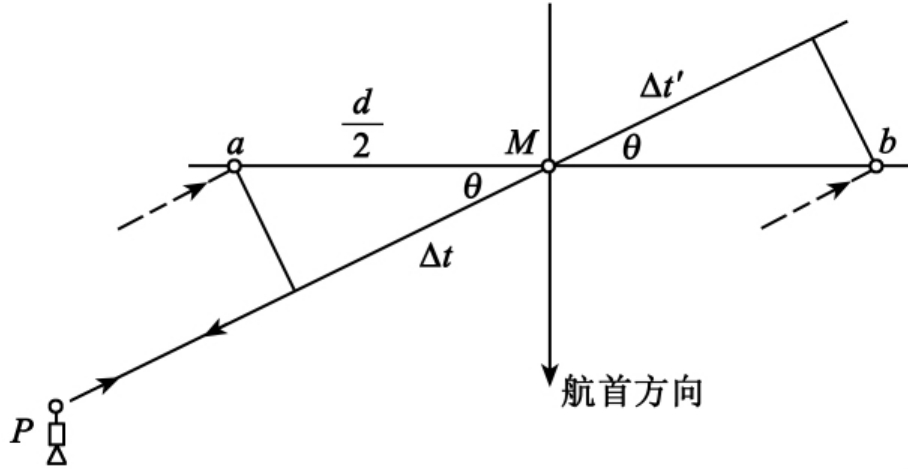
图2-8 测向方式工作原理
首先换能器M发射询问信号,水下应答器P接收后,发射应答信号,水听器a、b和换能器M均可接收到应答信号,由于a、b间距离与P、M间距离相比甚小,故可视发射与接收的声信号方向相互平行。但由于a、M、b距P的距离并不相等,若以M为中心,显然a接收到信号相位比M的要超前,而b接收到的信号相位比M的要滞后。设Δt和Δt'分别为a和b相位超前和滞后的时延,那么由图2-8可得出a和b接收信号的相位分别为:

水听器a和b的相位差为:
![]()
显然,当θ=90°时,a和b的相位差为零,这只有船首线在P的正上方才行。所以只要在航行中使水听器a和b接收到的信号相位差为零,就能引导船至水下应答器的正上方。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











