



12.3.3 空间信息搜索案例
在空间信息领域,基于注册中心机制的空间信息目录服务是目前广泛使用的空间信息资源搜索方法。注册中心提供了注册实体的元数据信息。注册中心在帮助服务请求者查找数据和服务方面扮演了重要角色。空间信息服务和数据均注册在注册中心。
本节以空间信息服务的注册和搜索为例,介绍语义支持的服务注册中心。第4章中已经提到注册服务目前有两个主流信息注册模型:ebRIM和UDDI。目前两种模型中服务的搜索功能均局限于对元数据关键字的直接匹配,而没有利用元数据中所蕴涵的语义信息,例如一些元数据信息中的层次关系。而且对服务的搜索没有充分考虑服务的能力,例如服务的操作功能、输入和输出、前提条件和状态改变等。因此需要额外研究增加语义信息到UDDI或ebRIM中以实现语义支持的搜索。
12.3.3.1 语义支持的UDDI
许多计算机技术领域的研究侧重于针对UDDI增加语义。Paolucci等(2002a)介绍了OWL-S与UDDI数据模型之间的映射。UDDI描述了三类实体:
(1)业务实体。它记录了所有者信息和联系方式。
(2)业务服务。记录了所有者提供的一个或多个特定的服务。
(3)绑定模块。明确了服务的接入(访问)终端点。
除了这些实体外,UDDI还提供了TModel数据结构。它可以描述实体的额外属性,从而提供了手段来描述本体概念。每个服务可以有一个或多个TModels来帮助描述服务的特性。因此服务的能力例如功能、输入和输出等可以使用相应的TModels来记录。目前大部分与UDDI相关的研究使用基于该思想的映射,它们区别通常在于对语义支持的搜索部件实现上的不同。
对于语义支持的搜索功能的实现,总结起来有三种类型:
(1)该功能作为UDDI外部一个独立的部件来实现,从而不影响已有的UDDI接口(Paolucci等,2002a)。使用一个OWL-S匹配引擎以实现语义支持的搜索。
服务语义信息注册步骤:
a.以OWL-S的形式发布服务的广告。
b.基于OWL-S profile与UDDI数据模型之间的映射,利用OWL-S提供的信息构建UDDI的服务描述并注册在UDDI中。
c.注册的同时产生一个所注册服务的参考标识符(Reference ID),捆绑该ID和服务广告的能力描述,存储在广告数据库(Advertisment Data Base),该广告数据库是OWL-S匹配引擎的组成部分。
语义支持的服务发现步骤:
a.以OWL-S的形式构建服务请求。
b.OWL-S匹配引擎从广告数据库中选择广告集并计算广告与请求间输入输出的语义匹配程度(Paolucci等,2002b)。
c.从匹配结果中获取Reference ID,根据ID得到UDDI的记录,并结合匹配结果中的广告作为结果返回给用户。
由于广告的数量可能庞大,匹配过程将非常消耗时间。有一种优化策略是提前在发布阶段进行匹配,对每个本体概念建立与相关服务的索引和输入输出的匹配程度。由于匹配信息在发布阶段建立完毕,服务发现阶段的查询就简化为层次数据结构的简单遍历(Srinivasan等,2004)。
不同于建立OWL-S到UDDI数据结构的映射,Sivashanmugam等(2004)介绍了从WSDL-S到UDDI的映射,其中对TModels的设计仍类似。但他们对匹配能力做了提升,增加了对服务操作功能的匹配。首先根据操作功能的本体概念得到服务选择集,然后对选择集中的服务利用输入输出匹配进行筛选。
(2)将该功能嵌入到UDDI中,扩展UDDI的接口以实现语义支持的查询(Akkiraju等,2003)。UDDI的API Schema扩展了一个属性(RDF:Property)指向本体概念。服务发布步骤与Paolucci等(2002a)类似,不同之处在于它没有包括Advertisment Data Base。服务的发现步骤如下:
a.根据UDDI API Schema构建服务请求。由于schema做了扩展,因此查询包含了语义信息。
b.根据查询中标准UDDI Schema过滤条件获得选择集。这可以使用标准的UDDI find方法。
c.将选择集送到语义匹配引擎执行与请求本体概念的语义匹配。语义匹配基于服务输入输出匹配。如果没有匹配的服务,语义匹配引擎还可以组合服务以满足要求。
(3)该功能包装为单个的外部匹配服务注册到UDDI中。在该类型中,UDDI将匹配功能外包给外部匹配服务从而可以选择不同类型的匹配服务,例如分别针对OWL-S,WSDL和UML的匹配服务(Colgrave等,2004)。注册的服务信息提供了合适的外部服务匹配信息。服务的发现步骤包括三个阶段:
a.从请求中发现外部匹配的信息并作为过滤条件获取服务的相关外部匹配描述。b.查找可用并兼容的外部匹配服务,传递需求和步骤a服务集中服务的外部匹配描述以调用外部匹配服务。
c.根据匹配的外部服务描述找到合适的服务。
12.3.3.2 语义支持的ebRIM
已经有一些关于如何将OWL元素映射到ebRIM元素的研究(Dogac等,2004;Wei等,2005)。其基本思想是使用ebRIM的ClassificationScheme、Slot、Association等元素来记录OWL对应的classes,properties和相关的一些公理例如subclassOf。如图12.7所示,ebRIM有四类基本的扩展点,通过Slot来增加属性,通过分类体系Classification来增加新的分类,通过扩展ExtrinsicObject来增加新的对象,通过定义新的Association来关联不同的RegistryObject。
案例采用OGC网络目录服务CSW的目录登记信息元模型ebRIM规范,对ebRIM模型进行扩展得到信息注册模型,以实现对空间数据与服务的语义信息注册。已有空间信息处理流程模型和服务链也可以通过CSW来管理。
图12.7给出了对ebRIM模型扩展得到信息注册模型的高层示意图,虚线部分代表了对OGC CSW ebRIM所进行的扩展,包括以下三部分(Yue等,2011):
(1)定义了一个新的类“流程模型Process Model”来注册空间信息处理流程模型。该定义通过继承已有的ebRIM类“外部对象ExtrinsicObject”来描述。每个服务Service对象通过描述describedBy关联到一个空间服务模型Process Model。Process Model既可以是原子的空间服务模型,也可以是复合的空间服务模型。当Process Model是复合的空间服务模型时,通过“流程模型Process Model”的属性槽“组合composedOf”可以关联到其组成的子模型序列。
(2)“空间数据类型”和“空间服务类型”本体作为“分类体系Classification-Scheme”注册在CSW中,建立空间服务类型分类体系Geospatial Service Types ClassificationScheme和空间数据类型分类体系Geospatial Data Types ClassificationScheme。通过这两个分类体系,就可以分别对“数据Dataset”和“服务Service”进行分类(classifiedBy)。
(3)为空间信息处理服务的输入输出、前提条件及状态改变的语义注册建立属性槽。输入输出的语义通过“流程模型Process Model”的属性槽“InputData输入”和“OutputData输出”来记录。状态改变的语义与服务实例相关,因此在“服务Service”的属性槽“preconditions前提条件”和“effects状态改变”记录。
结合已有的对UDDI和ebRIM的研究有助于对基于ebRIM的地理领域目录服务提供语义支持的搜索。语义匹配的实现基于概念术语的推理。定义了三种类型的语义匹配,包括EXACT,SUBSUME,RELAXED。假设OntR代表需求的概念,OntP代表提供的概念,三种类型的匹配按照匹配优先级从高到低的顺序定义如下:
EXACT:OntR equivalent to OntP
SUBSUME:OntP subclassOf OntR
RELAXED:OntR subclassOf OntP
在实现以上类似UDDI中第一种类型的方法,在请求者与目录服务间建立语义匹配中间件,最终实现了三种语义支持的搜索功能:数据搜索、服务搜索和处理流程模型搜索。
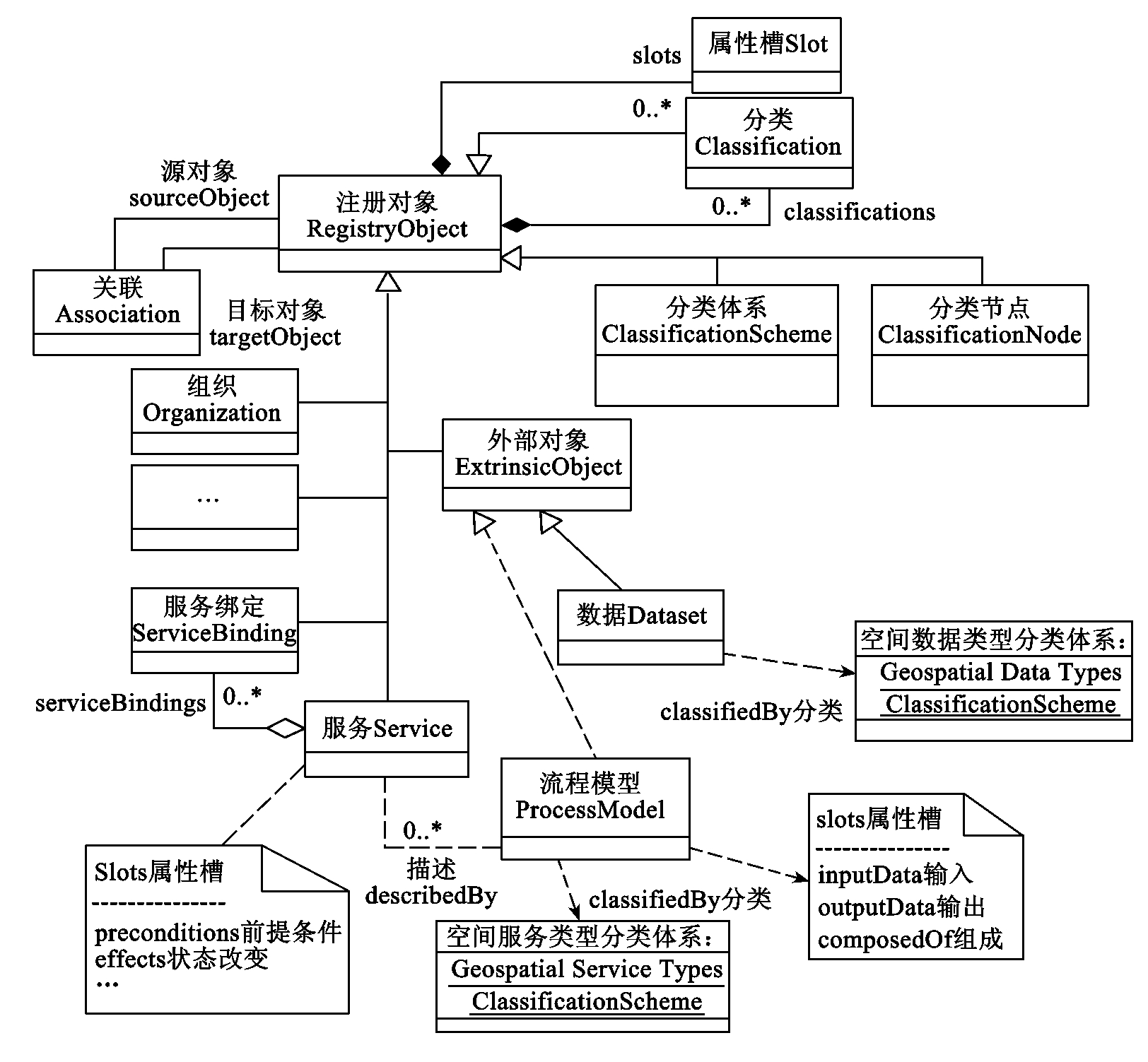
图12.7 目录登记信息元模型及语义注册扩展
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。











